





russtedrake PRO
Roboticist at MIT and TRI
MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 21
Follow live at https://slides.com/d/4rigVS4/live
(or later at https://slides.com/russtedrake/fall22-lec21)
/// Base type for all action primitives
class ActionPrimitiveInterface
{
virtual bool IsCandidate(const State& state) const = 0;
virtual Container GetOutcomes(const State& state) const = 0;
virtual double EstimateActionCost(
const State& current, const State& target) const = 0;
virtual Container Execute(const State& state) = 0;
virtual double Ranking() const = 0;
};
OpenDishwasherDoor CloseDishwasherDoor StartDishwasher LoadSoapPacket PullOutLowerRack PullOutUpperRack PullOutSilverwareRack PushInLowerRack PushInUpperRack PushInSilverwareRack
PutPlateInDishwasher ReorientMug PutMugInDishwasher OptimisticPutMugInDishwasher PutSilverwareInDishwasher PushUnmanipulableDish SenseDishCounts SenseDishToManipulate
work by Calder Phillips-Grafflin et al. at TRI
DishTaskState(const DishState& active_dish_state,
int32_t clean_items_put_away, int32_t clean_items_in_dishwasher,
int32_t dirty_items_in_dishwasher,
int32_t dirty_items_available,
const DishwasherState& current_dishwasher_state);
DishState(const RigidTransformd& dish_pose, DishType dish_type,
DishProgress dish_progress, RackRequirement rack_required);
DishwasherState(bool known, bool door_open, bool lower_rack_out,
bool upper_rack_out, bool silverware_rack_out,
bool lower_rack_full, bool upper_rack_full,
bool silverware_rack_full, bool started, bool soap_loaded);enum class DishType : uint8_t {
Unknown = 0x00,
Mug = 0x01,
Plate = 0x02,
Silverware = 0x03
};
enum class RackRequirement : uint8_t {
Unknown = 0x00,
LowerRack = 0x01,
UpperRack = 0x02,
SilverwareRack = 0x03
};enum class DishProgress : uint8_t {
Unknown = 0x00,
Unmanipulable = 0x01,
LikelyManipulable = 0x02,
Sensed = 0x03,
OptimisticOriented = 0x04,
Oriented = 0x05,
Placed = 0x06,
Released = 0x07
};work by Calder Phillips-Grafflin et al. at TRI
https://en.wikipedia.org/wiki/Stanford_Research_Institute_Problem_Solver
/// Base type for all action primitives
class ActionPrimitiveInterface
{
virtual bool IsCandidate(const State& state) const = 0;
virtual Container GetOutcomes(const State& state) const = 0;
...
};
from https://www.cs.toronto.edu/~sheila/2542/s14/A1/introtopddl2.pdf
Example: Gripper task with four balls
There is a robot that can move between two rooms and pick up or drop balls with either of his two arms. Initially, all balls and the robot are in the first room. We want the balls to be in the second room.
(define (domain gripper-strips)
(:predicates (room ?r)
(ball ?b)
(gripper ?g)
(at-robby ?r)
(at ?b ?r)
(free ?g)
(carry ?o ?g))
(:action move
:parameters (?from ?to)
:precondition (and (room ?from) (room ?to) (at-robby ?from))
:effect (and (at-robby ?to)
(not (at-robby ?from))))
(:action pick
:parameters (?obj ?room ?gripper)
:precondition (and (ball ?obj) (room ?room) (gripper ?gripper)
(at ?obj ?room) (at-robby ?room) (free ?gripper))
:effect (and (carry ?obj ?gripper)
(not (at ?obj ?room))
(not (free ?gripper))))
(:action drop
:parameters (?obj ?room ?gripper)
:precondition (and (ball ?obj) (room ?room) (gripper ?gripper)
(carry ?obj ?gripper) (at-robby ?room))
:effect (and (at ?obj ?room)
(free ?gripper)
(not (carry ?obj ?gripper)))))https://github.com/SoarGroup/Domains-Planning-Domain-Definition-Language/blob/master/pddl/gripper.pddl
(define (problem strips-gripper4)
(:domain gripper-strips)
(:objects rooma roomb ball1 ball2 ball3 ball4 left right)
(:init (room rooma)
(room roomb)
(ball ball1)
(ball ball2)
(ball ball3)
(ball ball4)
(gripper left)
(gripper right)
(at-robby rooma)
(free left)
(free right)
(at ball1 rooma)
(at ball2 rooma)
(at ball3 rooma)
(at ball4 rooma))
(:goal (and (at ball1 roomb)
(at ball2 roomb)
(at ball3 roomb))))https://github.com/SoarGroup/Domains-Planning-Domain-Definition-Language/blob/master/pddl/gripper-4.pddl
In the dish-loading example, we replan before each action to handle unexpected outcomes...
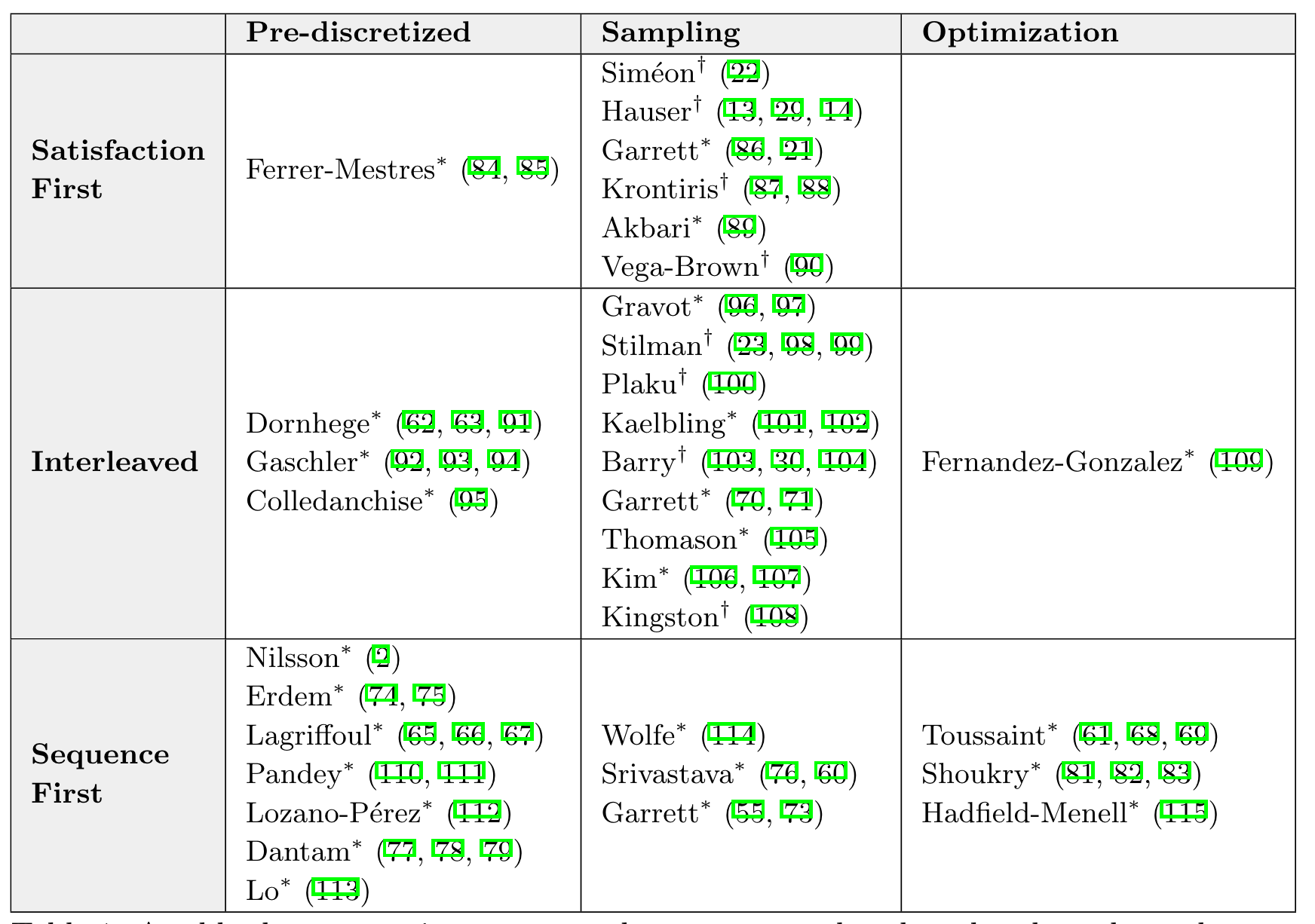
A nice survey (from Oct, 2020):
Logic-Geometric Programming
PDDLStream
Logic-Geometric Programming
PDDLStream
Danny Driess and Jung-Su Ha and Marc Toussaint, Deep Visual Reasoning: Learning to Predict Action Sequences for Task and Motion Planning from an Initial
Scene Image, Robotics: Science and Systems (R:SS) 2020.
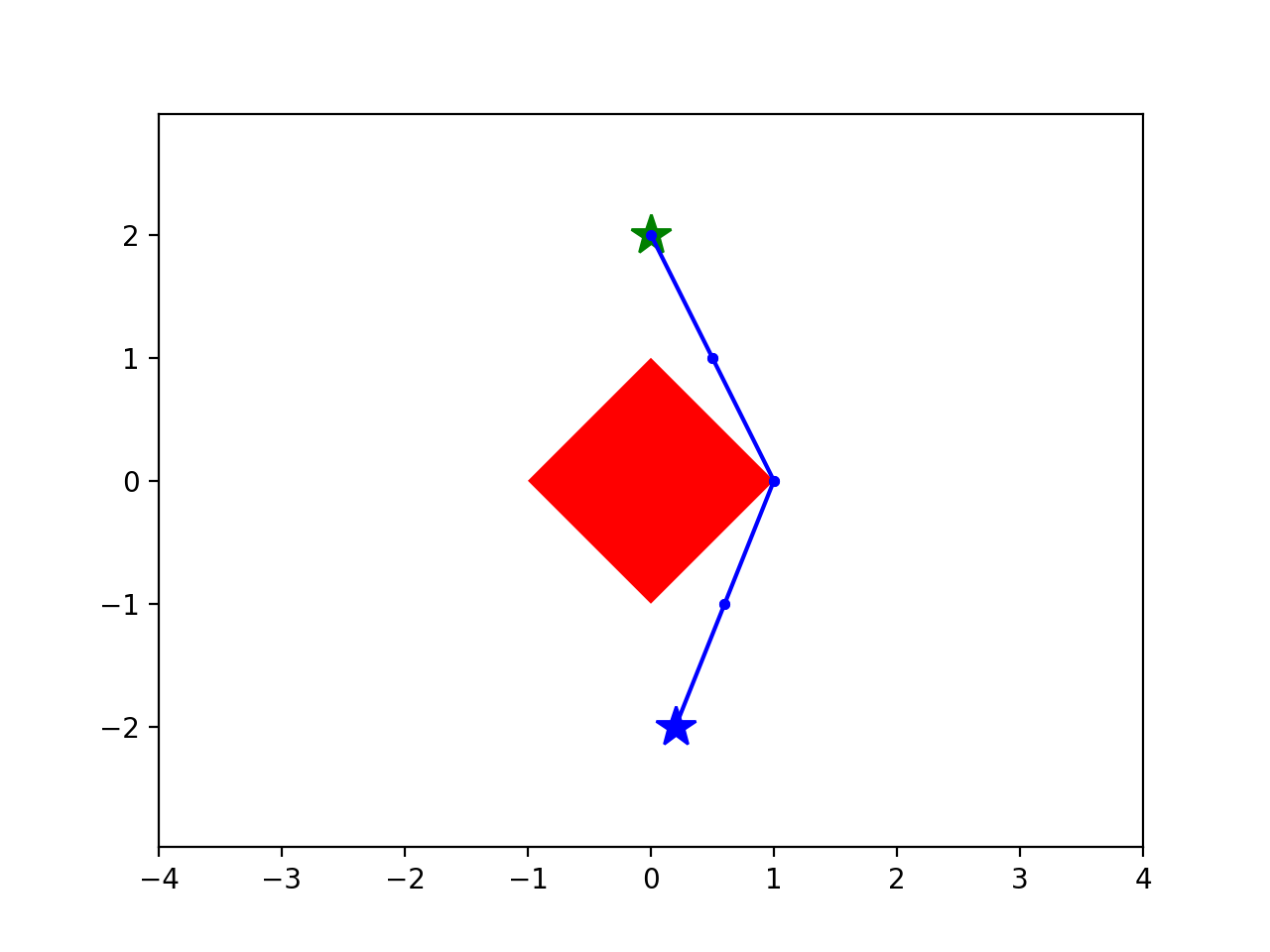
start
goal
collision-avoidance
(outside the \(L^1\) ball)
nonconvex
Convex relaxations provide lower bounds
Feasible solutions provide upper bounds
convex
convex
convex
convex
convex
Marc Toussaint and Jung-Su Ha and Danny Driess, Describing Physics For Physical Reasoning: Force-based Sequential Manipulation Planning, IEEE Robotics and Automation Letters 2020.
Logic-Geometric Programming
PDDLStream
Interleave sampling (from IK, or collision-free motion planner) with fast symbolic search.
Work by Savva Morozov
PDDLStream (by Caelan)
Work by Savva Morozov
And now Boyuan's presentation on
Large Language Models
Follow live at https://slides.com/d/EyfmqBY/live
(or later at slides.com/buoyancy99/deck)
By russtedrake
MIT Robotic Manipulation Fall 2022 http://manipulation.csail.mit.edu


