




russtedrake PRO
Roboticist at MIT and TRI
MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 22
Follow live at https://slides.com/d/bBIfQes/live
(or later at https://slides.com/russtedrake/fall22-lec22)
A sample annotated image from the COCO dataset
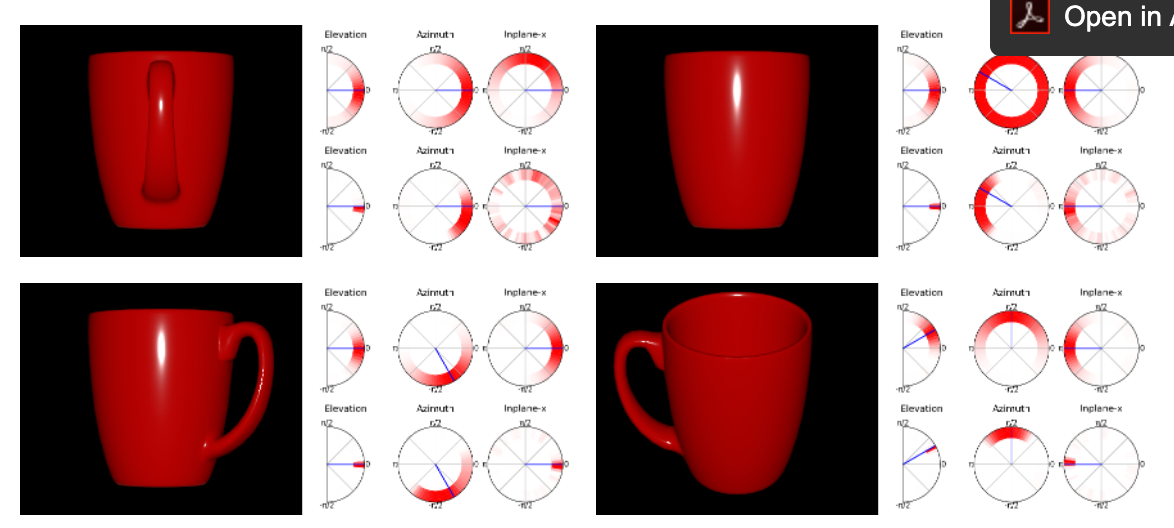
Typically don't predict keypoints directly; predict a "heatmap" instead
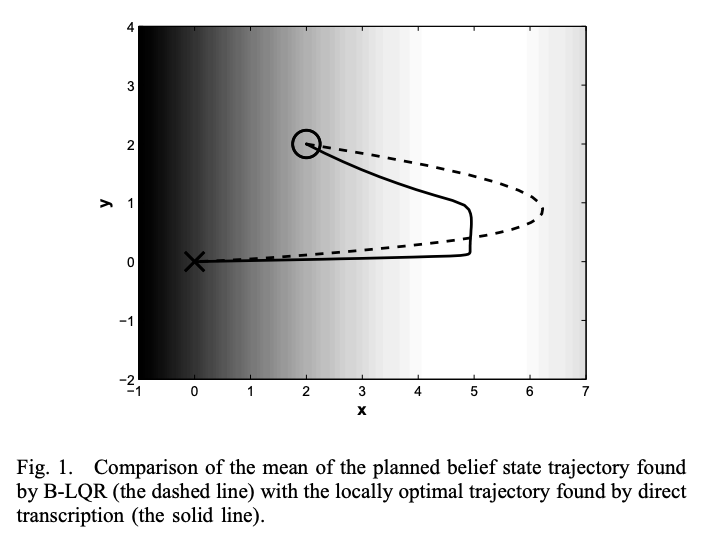
Rob Platt et al. Belief-space planning assuming maximum likelihood observations, RSS 2010
state-dependent measurement noise
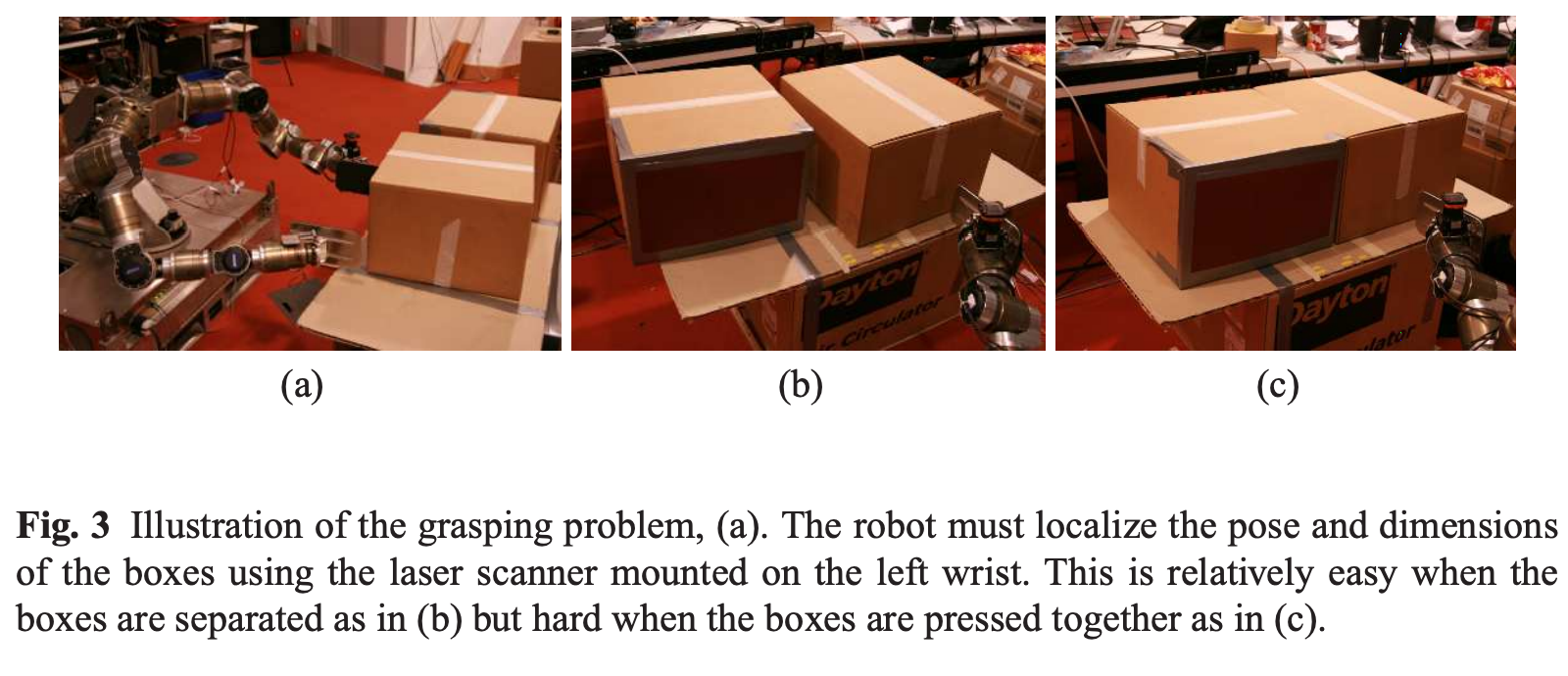
Rob Platt et al. Efficient planning in non-Gaussian belief spaces and its application to robot grasping, ISRR, 2011.
Rob Platt et al. Efficient planning in non-Gaussian belief spaces and its application to robot grasping, ISRR, 2011.
By russtedrake
MIT Robotic Manipulation Fall 2022 http://manipulation.csail.mit.edu


