




russtedrake PRO
Roboticist at MIT and TRI
Part 1
MIT 6.800/6.843:
Robotic Manipulation
Fall 2021, Lecture 11
Follow live at https://slides.com/d/uXws4NM/live
(or later at https://slides.com/russtedrake/fall21-lec11)
A sample annotated image from the COCO dataset
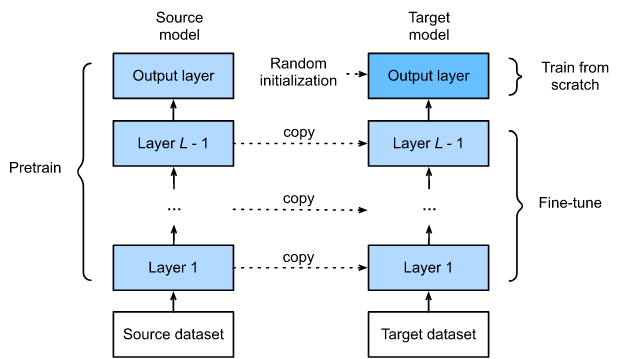
source: https://d2l.ai/chapter_computer-vision/fine-tuning.html
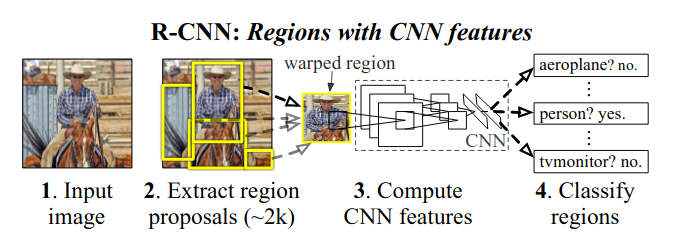
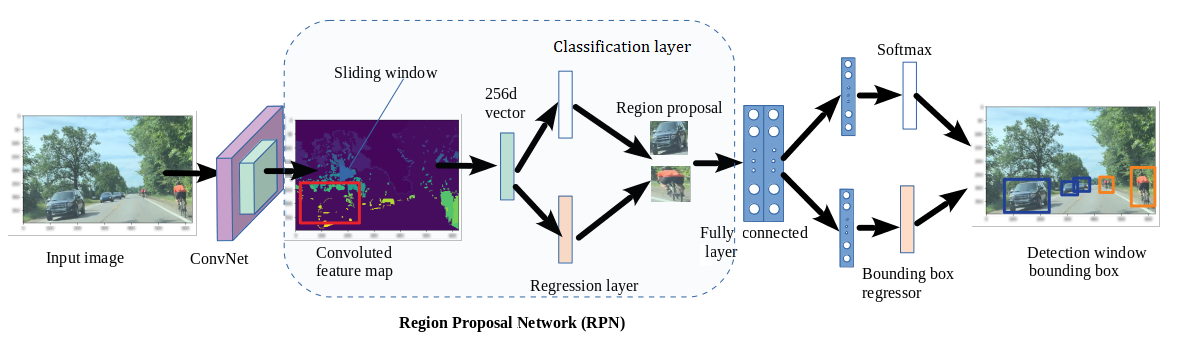
source: https://towardsdatascience.com/understanding-regions-with-cnn-features-r-cnn-ec69c15f8ea7
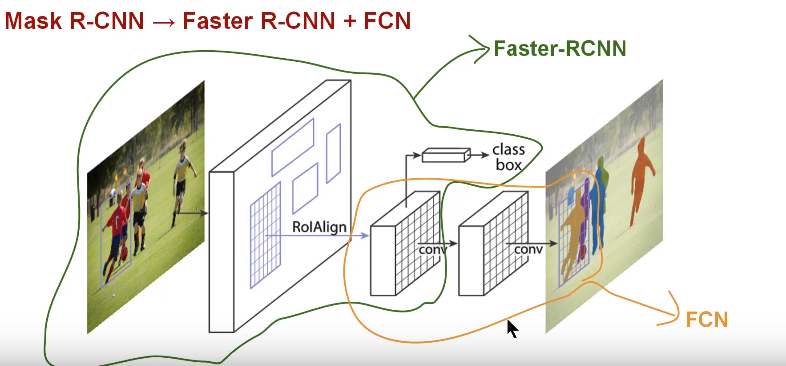
source: https://www.analyticsvidhya.com/blog/2018/07/building-mask-r-cnn-model-detecting-damage-cars-python/
Mask R-CNN notebook fine-tuned on clutter clearing data:
(data generation and training notebooks are also linked from the chapter)
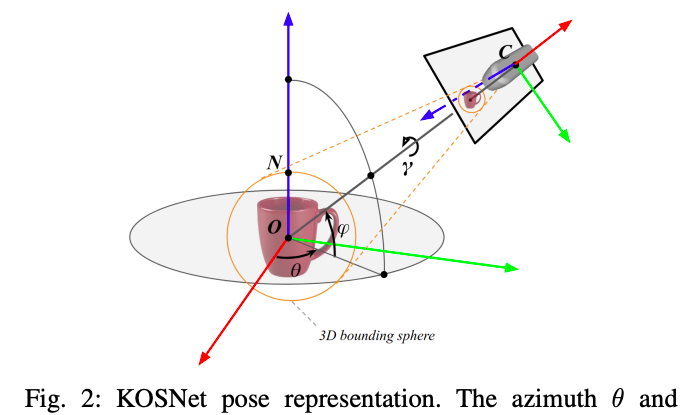
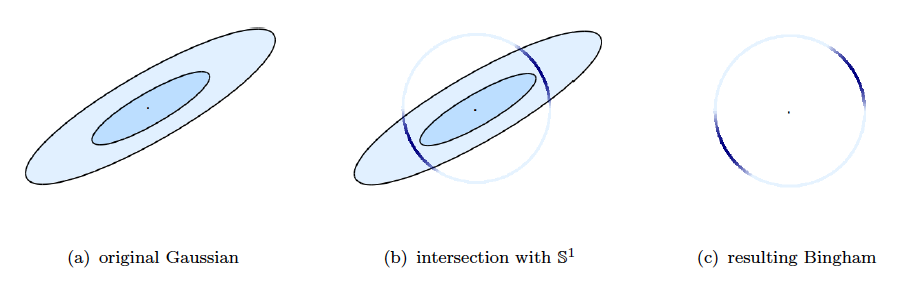
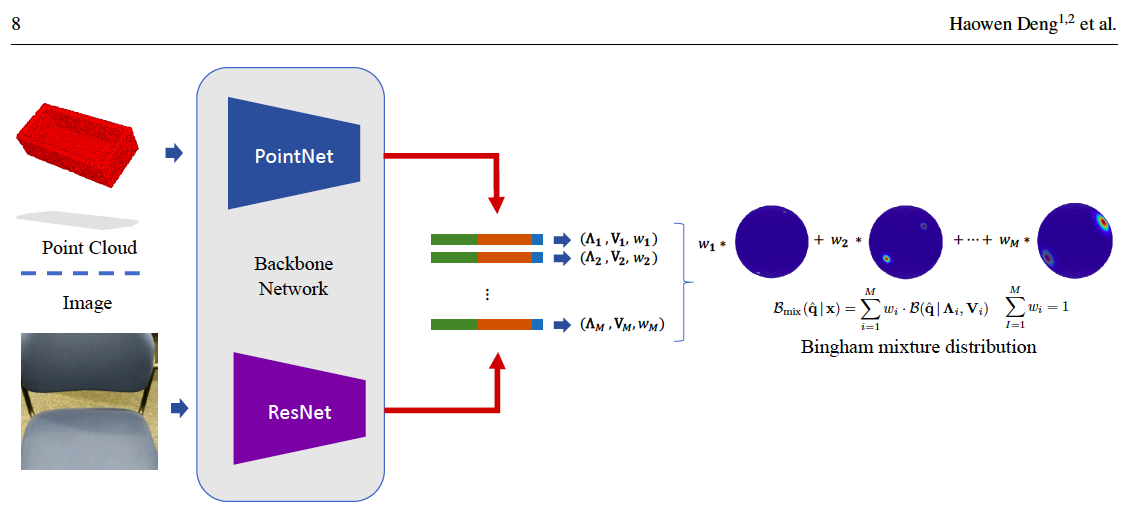
from Jared Glover's PhD thesis, 2014
in 2D:
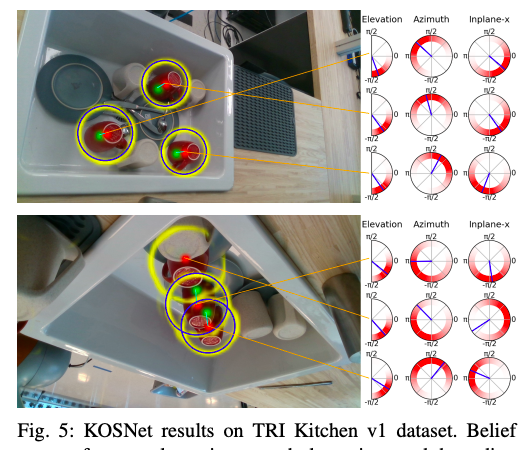
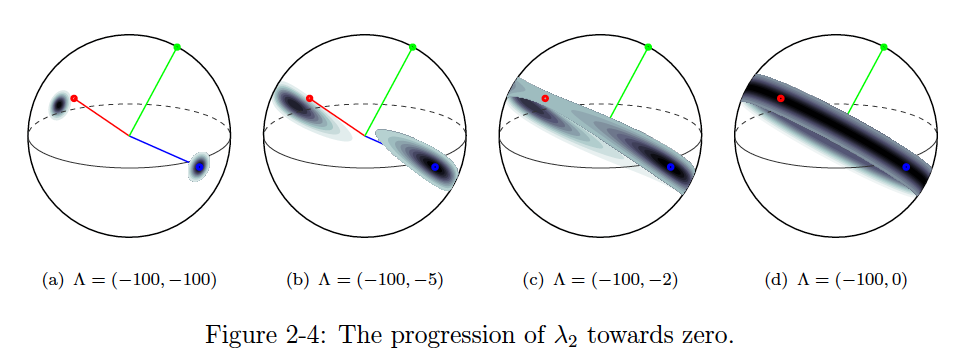
from Jared Glover's PhD thesis, 2014
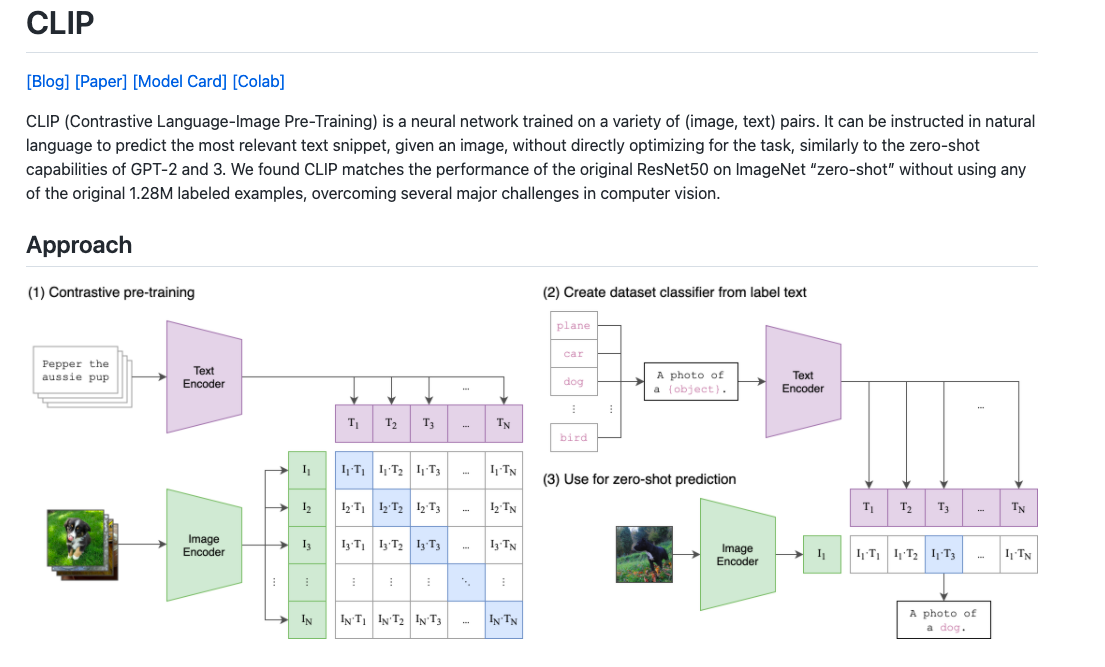
quick experiments using CLIP "out of the box" by Kevin Zakka
By russtedrake
MIT Robotic Manipulation Fall 2021 http://manipulation.csail.mit.edu


