


russtedrake PRO
Roboticist at MIT and TRI
Part I: Optimization-based
MIT 6.4210/2
Robotic Manipulation
Fall 2022, Lecture 13
Follow live at https://slides.com/d/k5l7hog/live
(or later at https://slides.com/russtedrake/fall22-lec13)
I would group them into:
"Using trajectory optimization made scooping up to twice as fast"
credit:
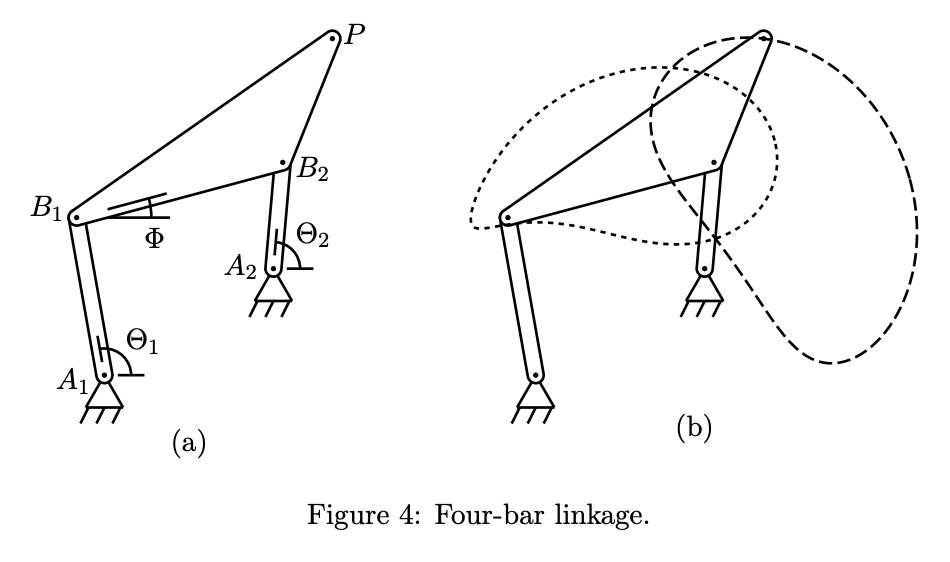
Charles W. Wampler and Andrew J. Sommese. Numerical algebraic geometry and algebraic kinematics. Acta Numerica, 20:469-567, 2011.
subject to:
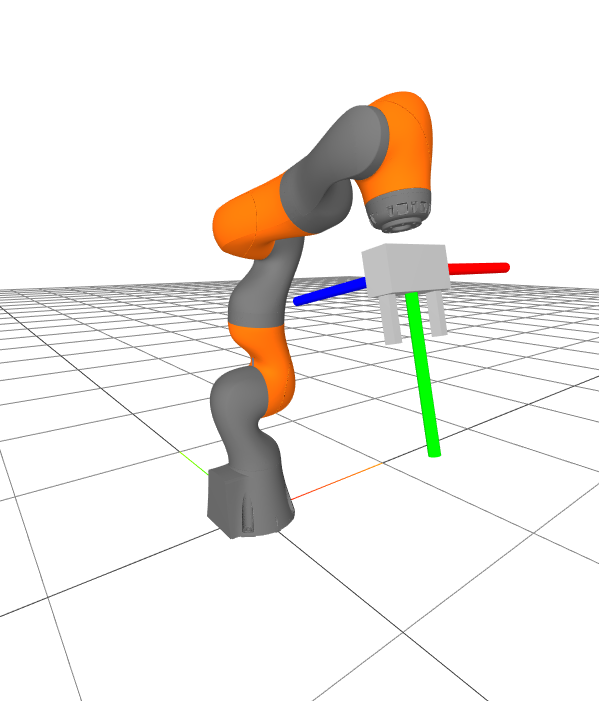
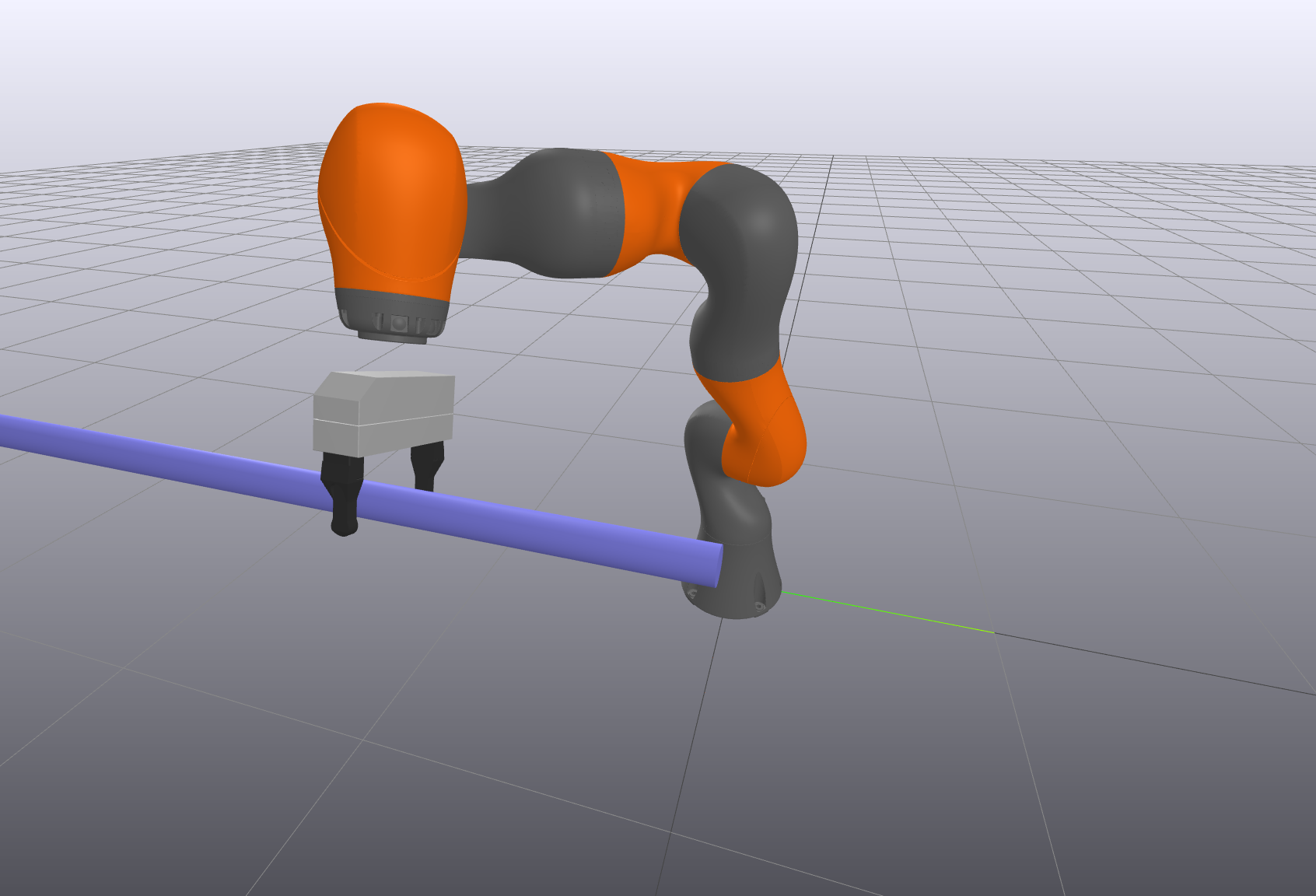
ik.AddPositionConstraint(
frameB=gripper_frame, p_BQ=[0, 0.1, -0.02],
frameA=cylinder_frame, p_AQ_lower=[0, 0, -0.5], p_AQ_upper=[0, 0, 0.5])
ik.AddPositionConstraint(
frameB=gripper_frame, p_BQ=[0, 0.1, 0.02],
frameA=cylinder_frame, p_AQ_lower=[0, 0, -0.5], p_AQ_upper=[0, 0, 0.5])for
work by Hongkai Dai et al. at TRI
Danny Driess and Jung-Su Ha and Marc Toussaint, Deep Visual Reasoning: Learning to Predict Action Sequences for Task and Motion Planning from an Initial
Scene Image, Robotics: Science and Systems (R:SS) 2020.
By russtedrake
MIT Robotic Manipulation Fall 2021 http://manipulation.csail.mit.edu


