


russtedrake PRO
Roboticist at MIT and TRI
MIT 6.832: Underactuated Robotics
Spring 2021, Lecture 22
https://keypointnet.github.io/
https://nanonets.com/blog/human-pose-estimation-2d-guide/
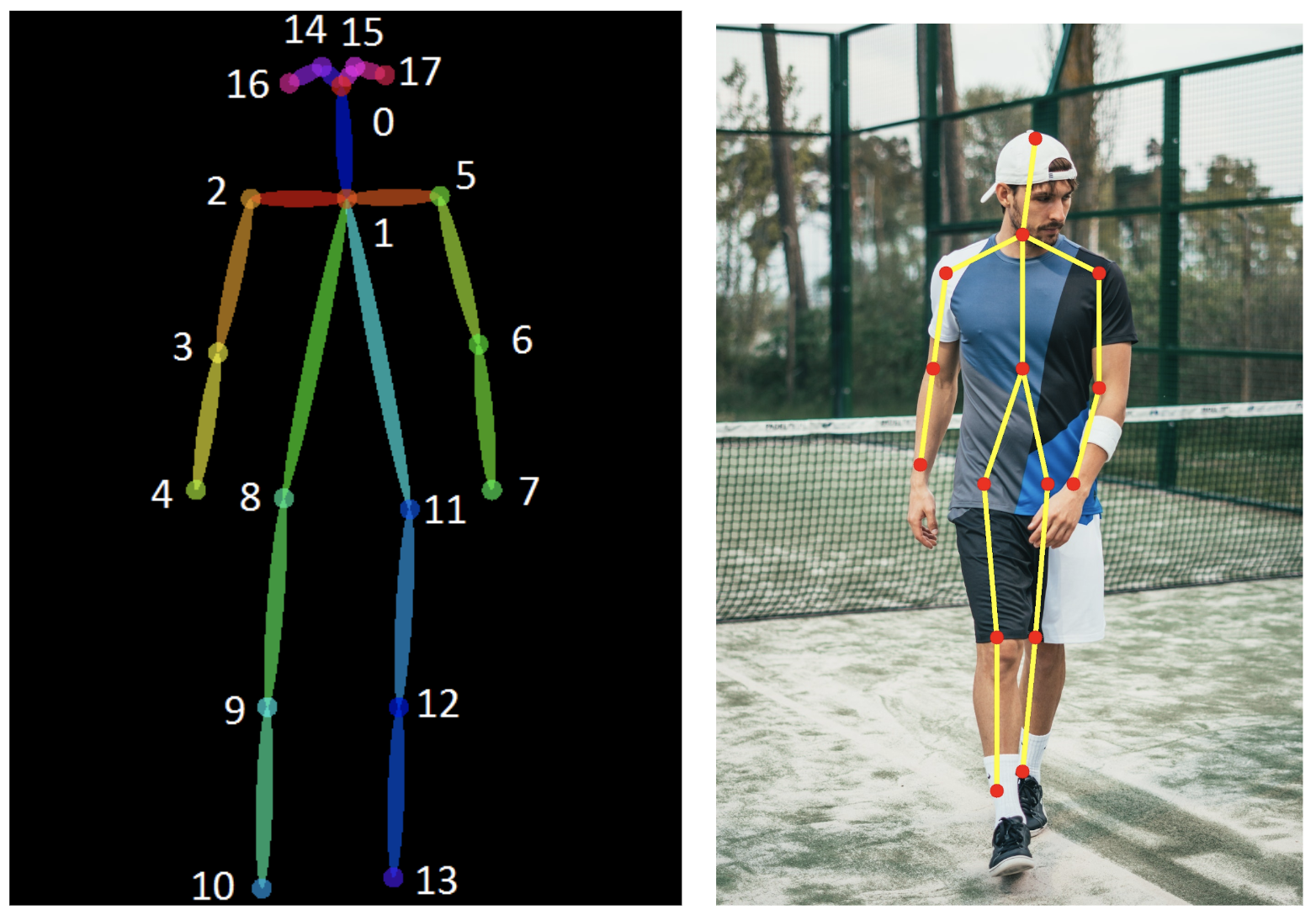
Core technology: dense correspondences
(built on Schmidt, Newcombe, Fox, RA-L 2017)
Peter R. Florence*, Lucas Manuelli*, and Russ Tedrake. Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation. CoRL, 2018.
dense 3D reconstruction
+ pixelwise contrastive loss
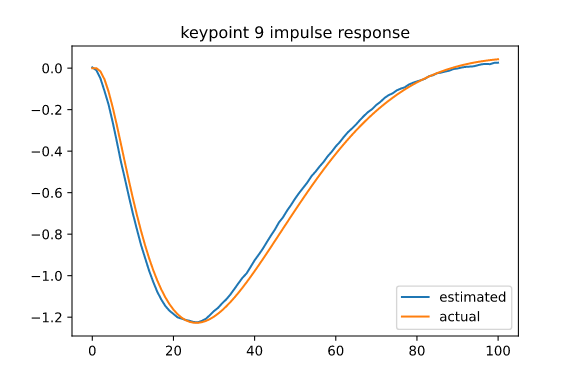
Learn descriptor keypoint dynamics + trajectory MPC
Learn descriptor keypoint dynamics + trajectory MPC
System
Auto-regressive (ARX)
Lagrangian mechanics,
Recurrent neural networks (e.g. LSTM), ...
Feed-forward networks (e.g. \(y_n\)= image)
input
output
State-space
The failings of our physics-based models are mostly due to the unreasonable burden of estimating the "Lagrangian state" and parameters.
For e.g. onions, laundry, peanut butter, ...
The failings of our deep models are mostly due to our inability to due efficient/reliable planning, control design and analysis.
By russtedrake
MIT Underactuated Robotics Spring 2021 http://underactuated.csail.mit.edu


