




russtedrake PRO
Roboticist at MIT and TRI
MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 17
Follow live at https://slides.com/d/bB1f1jQ/live
(or later at https://slides.com/russtedrake/spring22-lec17)
Image credit: Boston Dynamics
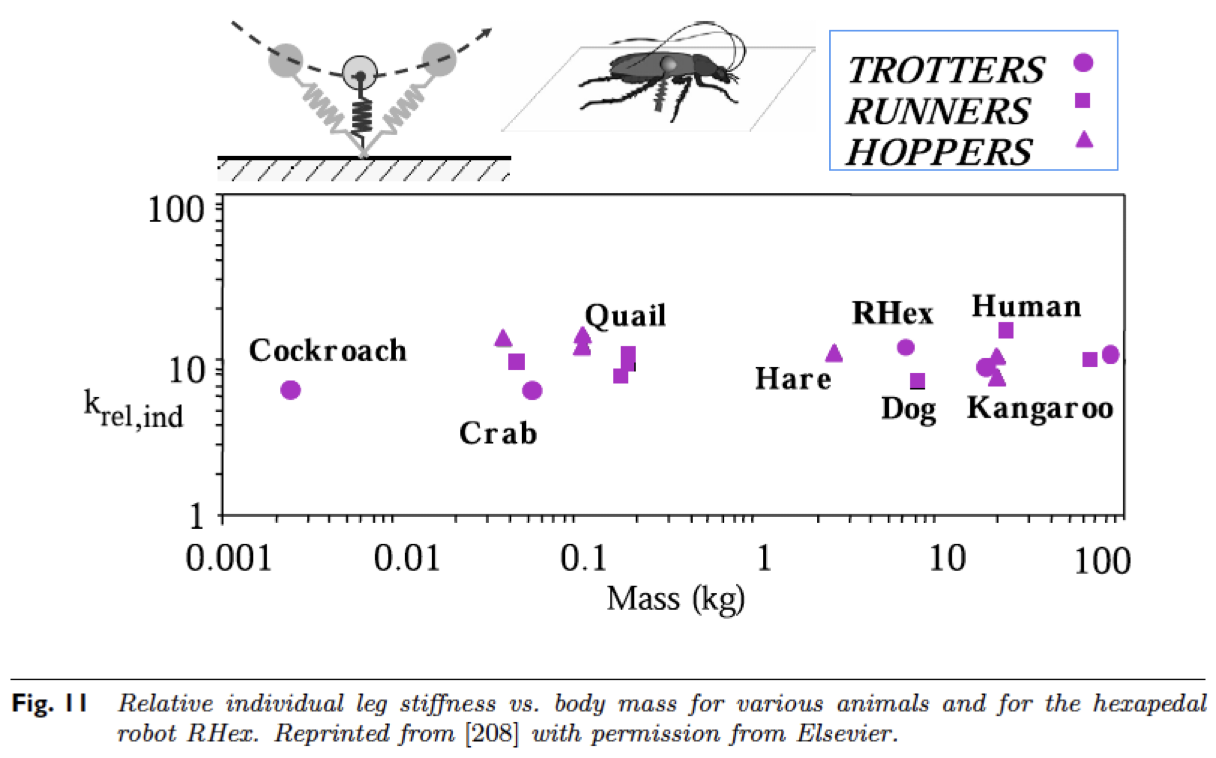
from D. Koditschek, R. Full, and M. Buehler, Mechanical aspects of legged locomotion control,
Arthropod Structure and Development, 33 (2004), pp. 251–272.
courtesy of Devin Jindrich
https://www.cs.cmu.edu/~hgeyer/Research_Principles.html
By russtedrake
MIT Underactuated Robotics Spring 2021 http://underactuated.csail.mit.edu


