




russtedrake PRO
Roboticist at MIT and TRI
MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 18
Follow live at https://slides.com/d/GDLYVFE/live
(or later at https://slides.com/russtedrake/spring22-lec18)
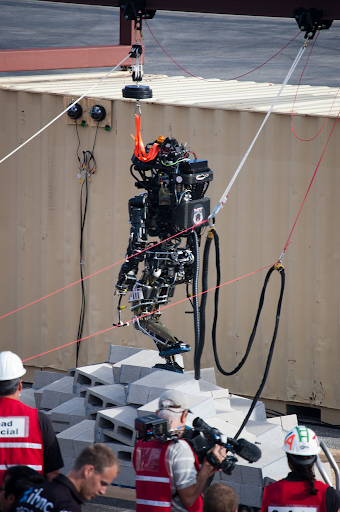
Image credit: Boston Dynamics
Footsteps add a combinatorial aspect to the planning problem:
Left foot or right foot?
Cinderblock A or block B?
Explicitly address this combinatorial structure with MIP (specifically MICP)
| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
By russtedrake
MIT Underactuated Robotics Spring 2021 http://underactuated.csail.mit.edu


