








russtedrake PRO
Roboticist at MIT and TRI
MIT 6.821: Underactuated Robotics
Spring 2024, Lecture 15
Follow live at https://slides.com/d/MC35Wok/live
(or later at https://slides.com/russtedrake/spring24-lec15)
Image credit: Boston Dynamics
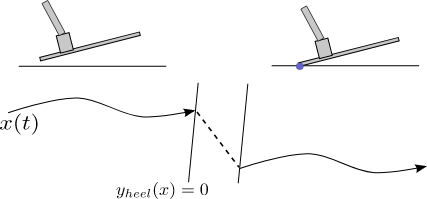
http://www.ai.mit.edu/projects/leglab/
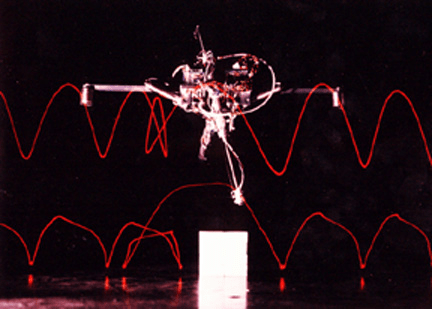
http://www.ai.mit.edu/projects/leglab/
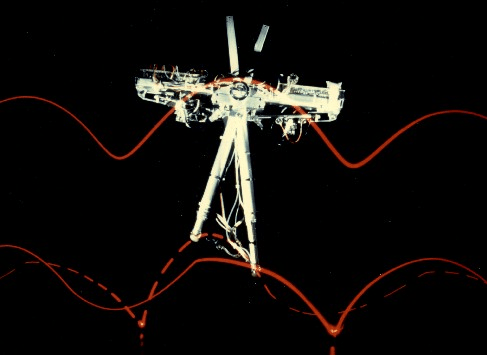
http://www.ai.mit.edu/projects/leglab/
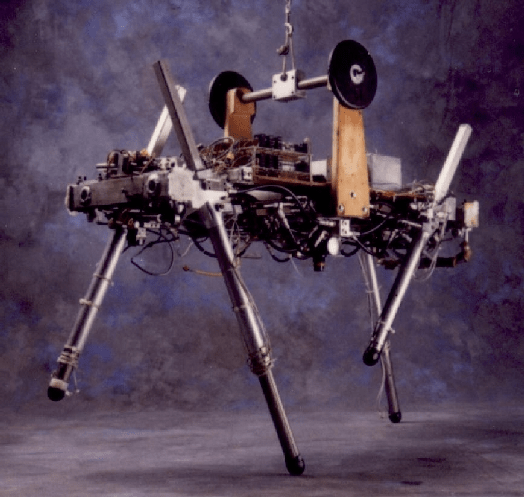
http://www.ai.mit.edu/projects/leglab/
http://www.ai.mit.edu/projects/leglab/
https://www.cs.cmu.edu/~hgeyer/Research_Principles.html
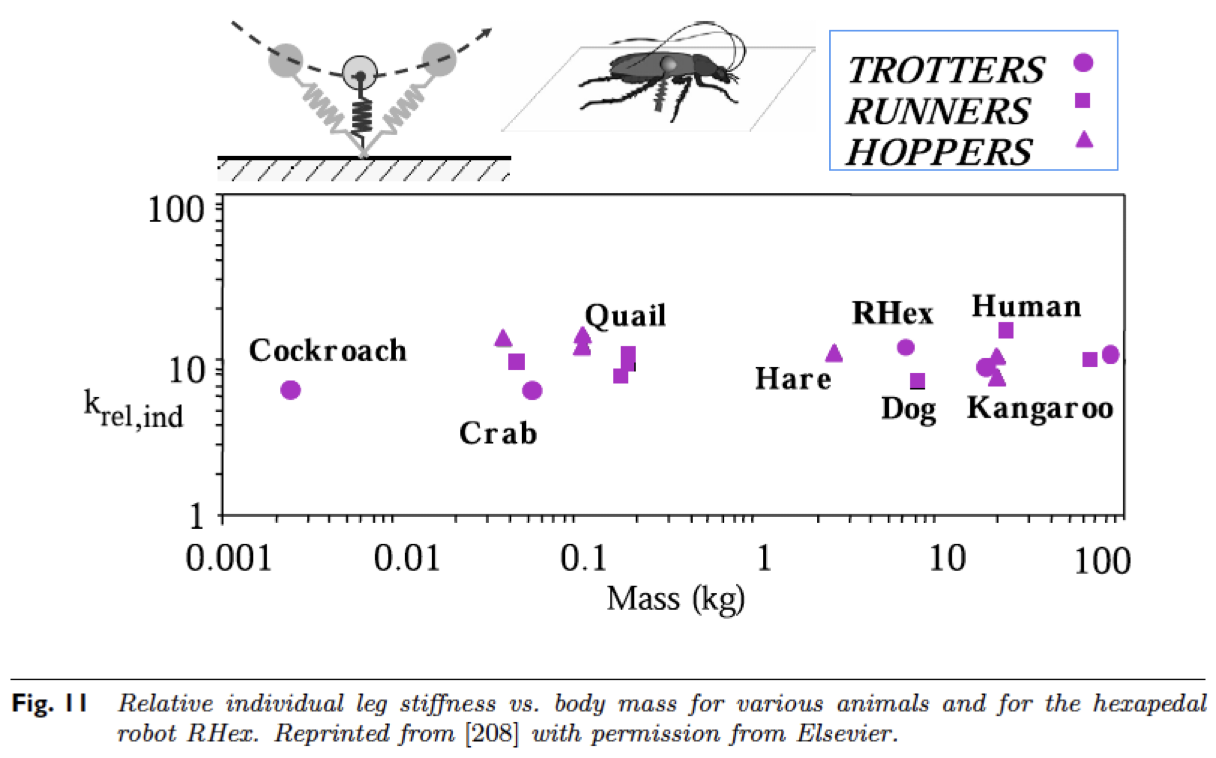
from D. Koditschek, R. Full, and M. Buehler, Mechanical aspects of legged locomotion control,
Arthropod Structure and Development, 33 (2004), pp. 251–272.
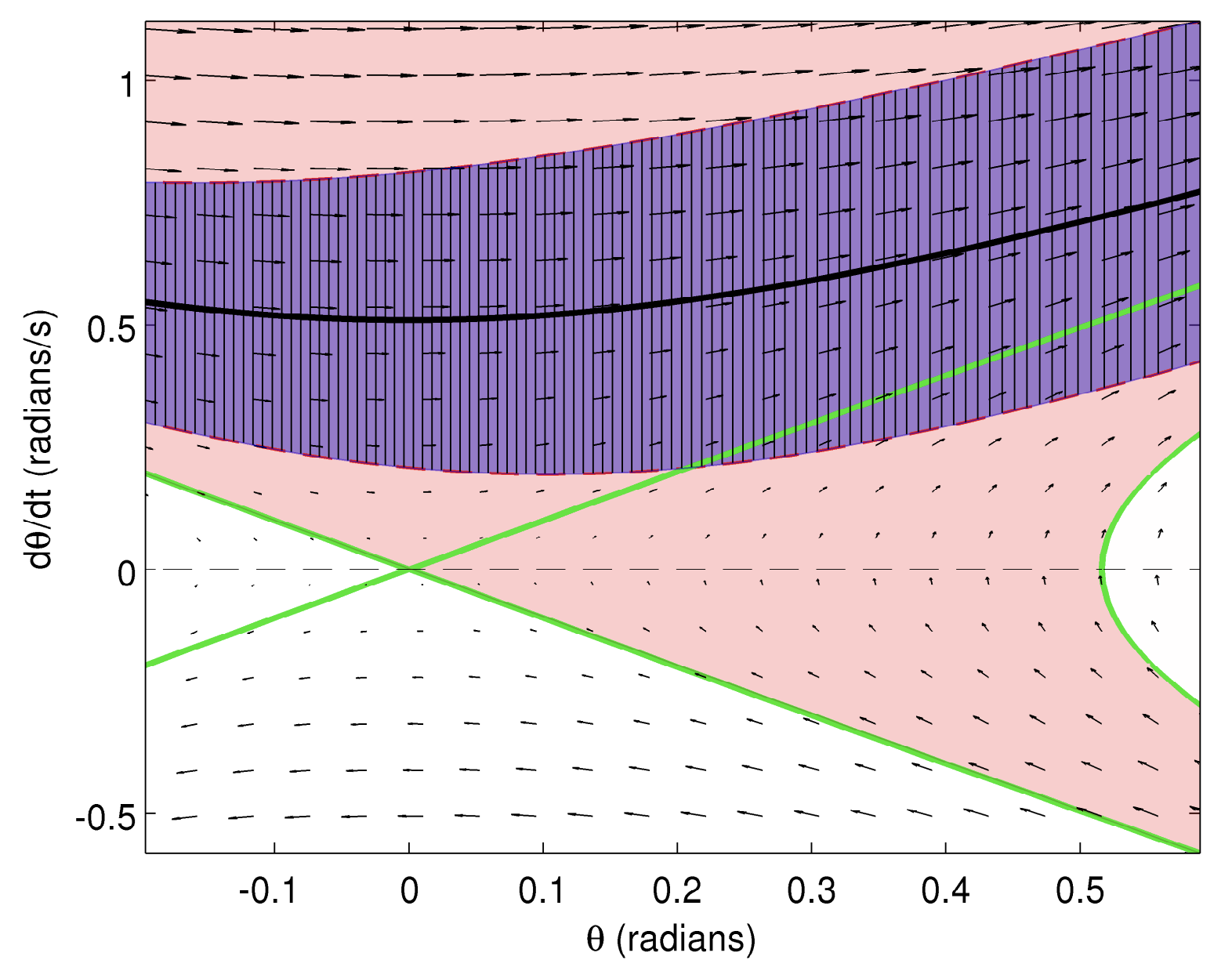
courtesy of Devin Jindrich
By russtedrake
MIT Underactuated Robotics Spring 2024 http://underactuated.csail.mit.edu


