














Sarah Dean PRO
asst prof in CS at Cornell
Sarah Dean\(^1\) Andrew J. Taylor\(^2\) Ryan K. Cosner\(^2\)
Benjamin Recht\(^1\) Aaron D. Ames\(^2\)
\(^1\)UC Berkeley \(^2\)Caltech
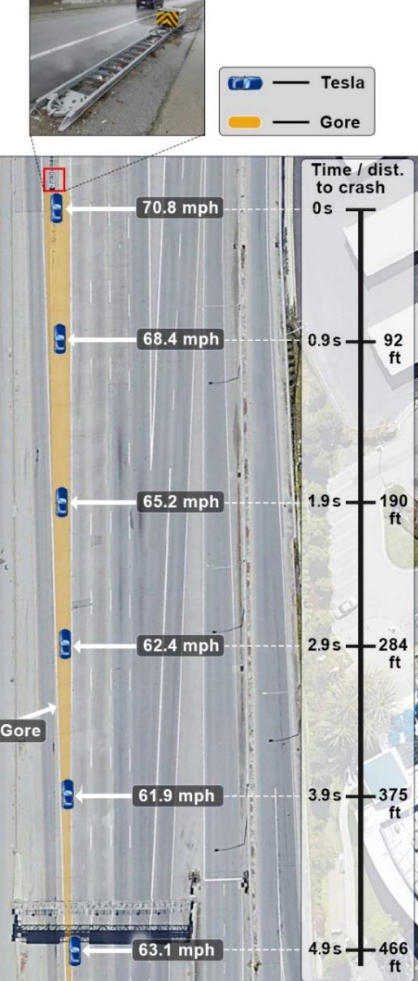
Robotic systems use increasingly complex sensors
Complex calibration problems—opportunities for measurement model error
Complex calibration procedures—opportunities for measurement model error
How do we ensure that complex and data-driven sensing can be safe and effective for controlling robotic systems?
Nonlinear control affine dynamics: \(\dot{\mathbf x} = \mathbf f(\mathbf x)+\mathbf g(\mathbf x)\mathbf u\)
System observed by \(\mathbf p(\mathbf x) = \mathbf y\), state estimated by \(\widehat{ \mathbf q}(\mathbf y) = \widehat{\mathbf x}\)
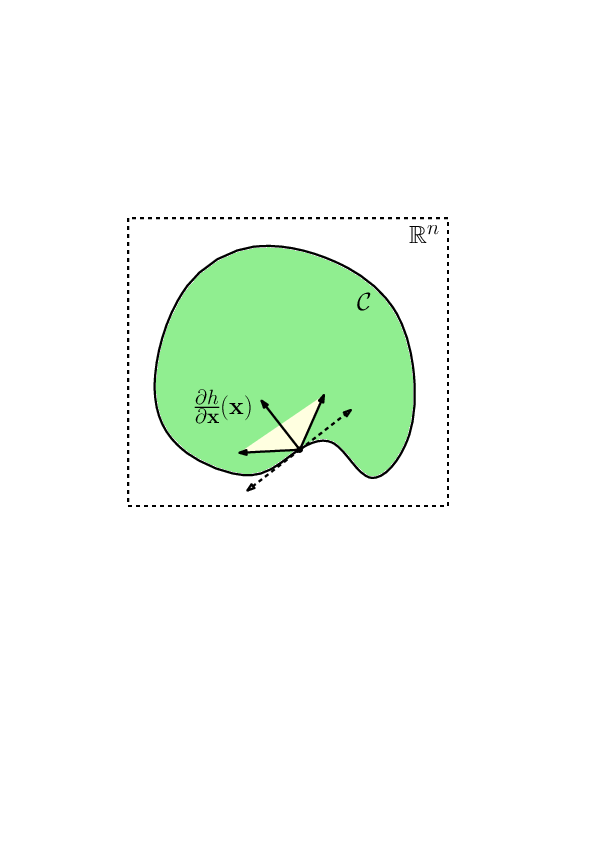
Subset of state space:
\(\mathcal C = \{\mathbf x \mid h(\mathbf x) \geq 0\}\)
Safety defined as invariance of \(\mathcal C\)
System observed by \(\mathbf p(\mathbf x) = \mathbf y\), state estimated by \(\widehat{ \mathbf q}(\mathbf y) = \widehat{\mathbf x}\)
\(\widehat{\mathbf q}\)
The function \(h\) is a control barrier function if for some \(\alpha\in\mathcal K_\infty^e\)
This condition ensures the existence of \(\mathbf u\) such that
\(\frac{\partial h}{\partial \mathbf x}( \mathbf x) \dot{ \mathbf x} \geq -\alpha(h(\mathbf x))\)
\(\sup\limits_{\mathbf u\in\mathbb{R}^m} \frac{\partial h}{\partial \mathbf x}( \mathbf x) (\mathbf f( \mathbf x) + \mathbf g(\mathbf x)\mathbf u) \geq -\alpha(h(\mathbf x))\)
If \(\mathbf u\) chosen such that \(\dot{h}(\mathbf x, \mathbf u) \geq -\alpha( h(\mathbf x))\) then \(h(\mathbf x)\) remains nonnegative, so the safe set \(\mathcal C\) is invariant
\(\dot h( \mathbf x, \mathbf u) \geq -\alpha(h(\mathbf x))\)
(Ames et al. 2014, 2017)
If \(\mathbf u\) chosen such that \(\dot{h}(\mathbf x, \mathbf u) \geq -\alpha( h(\mathbf x))\) then \(h(\mathbf x)\) remains nonnegative, so the safe set \(\mathcal C\) is invariant
The set of inputs which ensure safety:
\(K_\mathrm{cbf}(\mathbf x) = \{\mathbf u\mid \frac{\partial h}{\partial \mathbf x}( \mathbf x) \mathbf f( \mathbf x) + \frac{\partial h}{\partial \mathbf x}( \mathbf x)\mathbf g(\mathbf x)\mathbf u \geq -\alpha(h(\mathbf x))\}\)
To filter a given controller \(\mathbf k_d({\mathbf x})\) via convex optimization:
\(\argmin\limits_{\mathbf u \in \mathbb{R}^m} \| \mathbf u - \mathbf k_d({\mathbf x}) \|\)
\(~~~~~~\text{s.t.} ~~L_{\mathbf f}h( \mathbf x) + L_{\mathbf g}h(\mathbf x)\mathbf u \geq -\alpha(h(\mathbf x))\)
Estimated state reconstructed by approximate inverse
\(\widehat{\mathbf x} = \widehat{\mathbf q}(\mathbf y)=\mathbf x + (\widehat{\mathbf q}(\mathbf y) - {\mathbf q}(\mathbf y))=\mathbf x + {\mathbf e}(\mathbf y) \)
Our setting has imperfect state observation
Considering all \(\mathbf x\) in uncertainty set:
\(\min\limits_{\mathbf x\in \mathcal X(\mathbf y)} L_{\mathbf f} h(\mathbf x) + L_{\mathbf g}h(\mathbf x) \mathbf u + \alpha(h(\mathbf x)) \geq 0\)
\(\min\limits_{\|\mathbf e\|\leq \epsilon(\mathbf y)} L_{\mathbf f} h(\widehat{\mathbf x}-\mathbf e) + L_{\mathbf g}h(\widehat{\mathbf x}-\mathbf e) \mathbf u + \alpha(h(\widehat{\mathbf x}-\mathbf e)) \geq 0\)
(Clark 2020, Nilsson 2020)
We define the set of inputs which ensure robust safety:
\(K_\mathrm{mr}(\mathbf y) = \{\mathbf u\mid L_{\mathbf f}h( \widehat{\mathbf x}) + L_{\mathbf g}h(\widehat{\mathbf x})\mathbf u - (a(\mathbf y) + b(\mathbf y)\|\mathbf u\|) \geq -\alpha(h(\widehat{\mathbf x}))\}\)
for given \(a, b~:~\mathbb{R}^k\to\mathbb{R}_+\).
Main Result: As long as
then by setting \(a(\mathbf y) = (\mathcal L_{L_{\mathbf f}h}+\mathcal L_{\alpha \circ h})\epsilon(\mathbf y)\) and \(b(\mathbf y) =\mathcal L_{L_{\mathbf g}h} \epsilon(\mathbf y)\),
any controller contained in \(K_\mathrm{mr}(\mathbf y)\) renders the system safe.
The MR-CBF optimization problem (SOCP)
is feasible as long as
\(\epsilon(\mathbf y) \leq \max \Big( \frac{\|L_{\mathbf g}h(\widehat{\mathbf x})\|}{\mathcal L_{L_{\mathbf g}h} },\frac{L_{\mathbf f}h( \widehat{\mathbf x}) +\alpha(h(\widehat{\mathbf x}))}{\mathcal L_{L_{\mathbf f}h}+\mathcal L_{\alpha \circ h}}\Big)\)
which can be achieved from data
\(\argmin\limits_{\mathbf u \in \mathbb{R}^m} \| \mathbf u - \mathbf k_d(\widehat{\mathbf x}) \|\)
\(~~~~~~~~\text{s.t.}~~L_{\mathbf f}h( \widehat{\mathbf x}) + L_{\mathbf g}h(\widehat{\mathbf x})\mathbf u\)
\(- ((\mathcal L_{L_{\mathbf f}h}+\mathcal L_{\alpha \circ h})\epsilon(\mathbf y) + \mathcal L_{L_{\mathbf g}h} \epsilon(\mathbf y)\|\mathbf u\|) \geq -\alpha(h(\widehat{\mathbf x}))\)
Segway robot constrained to planar motion
Safety defined by pitch angle and rate
\(|\dot{\theta}_y +10(\theta_y-\theta_y^\mathrm{eq}) |\leq 4\)
Pitch angle \(\theta_y\) and position \(r\) measured only by camera
Training data collected from grid of \(\theta_y\) and \(r\) (\(N=800\))
Model mapping image to \(\theta_y,r\) trained using sklearn kernel ridge regression with radial basis functions
Filtered PD control from 15 kHz camera feed
CBF filter does not ensure safety, MR-OP filter does
For details, see our paper at https://arxiv.org/abs/2010.16001
Guaranteeing Safety of Learned Perception Modules via Measurement-Robust Control Barrier Functions
Sarah Dean Andrew J. Taylor Ryan K. Cosner Benjamin Recht Aaron D. Ames
References
Ames, Aaron D., Jessy W. Grizzle, and Paulo Tabuada. "Control barrier function based quadratic programs with application to adaptive cruise control." IEEE CDC, 2014.
Ames, Aaron D., et al. "Control barrier function based quadratic programs for safety critical systems." IEEE TAC, 2016.
Nilsson, Petter, and Aaron D. Ames. "Lyapunov-like conditions for tight exit probability bounds through comparison theorems for sdes." IEEE ACC, 2020.
Clark, Andrew. "Control barrier functions for complete and incomplete information stochastic systems." IEEE ACC, 2019.
By Sarah Dean




