
Clayton Shonkwiler PRO
Mathematician and artist
/cvg23
this talk!
Special Session on Harmonic Analysis and its Applications to Signals and Information, Apr. 15, 2023
Florida State University
National Science Foundation (DMS–2107700)
Simons Foundation (#709150)
(The) Ohio State University
Johns Hopkins University
\(\mathbb{K} = \mathbb{R}\) or \(\mathbb{C}\). A (finite) frame in \(\mathbb{K}^d\) is a spanning set \(f_1, \dots, f_N \in (\mathbb{K}^d)^N\).
\(F = [f_1 \, f_2 \, \ldots \, f_N ] \in \mathbb{K}^{d \times N}\)
Frame operator \(FF^* = \sum f_if_i^*\)
If \(\|f_i\|^2 = 1\) for all \(i\), the \(P_i := f_if_i^*\) are orthogonal projectors.
\(FF^* = \sum f_if_i^* = \sum P_i\)
More generally, (unweighted) fusion frames are sequences of subspaces \(S_1, \ldots , S_N \subseteq \mathbb{K}^d\) so that \(\sum P_i\) is invertible.
Unit-norm frames \(\Longleftrightarrow\) (certain) points in \(\prod_{i=1}^N \mathbb{KP}^{d-1}\)
(certain) points in \(\prod_{i=1}^N \operatorname{Gr}(k_i,d)\)
These (fusion) frames are tight if \(\sum P_i = \lambda \mathbb{I}_{d \times d}\).
\(\Longleftrightarrow\)
FUNTFs
TFFs
Definition [Benedetto–Fickus, Casazza–Fickus]
The (fusion) frame potential is
\(\operatorname{FP}(P_1,\ldots,P_N) = \|\sum P_i\|_{\operatorname{Fr}}^2\)
Proposition [cf. Welch]
When they exist, the FUNTFs/TFFs are exactly the global minima of \(\operatorname{FP}\).
Theorem [Benedetto–Fickus]
As a function on unit-norm frames with fixed \(d\) and \(N\), \(\operatorname{FP}\) has no spurious local minima.
Theorem [with Mixon, Needham, and Villar]
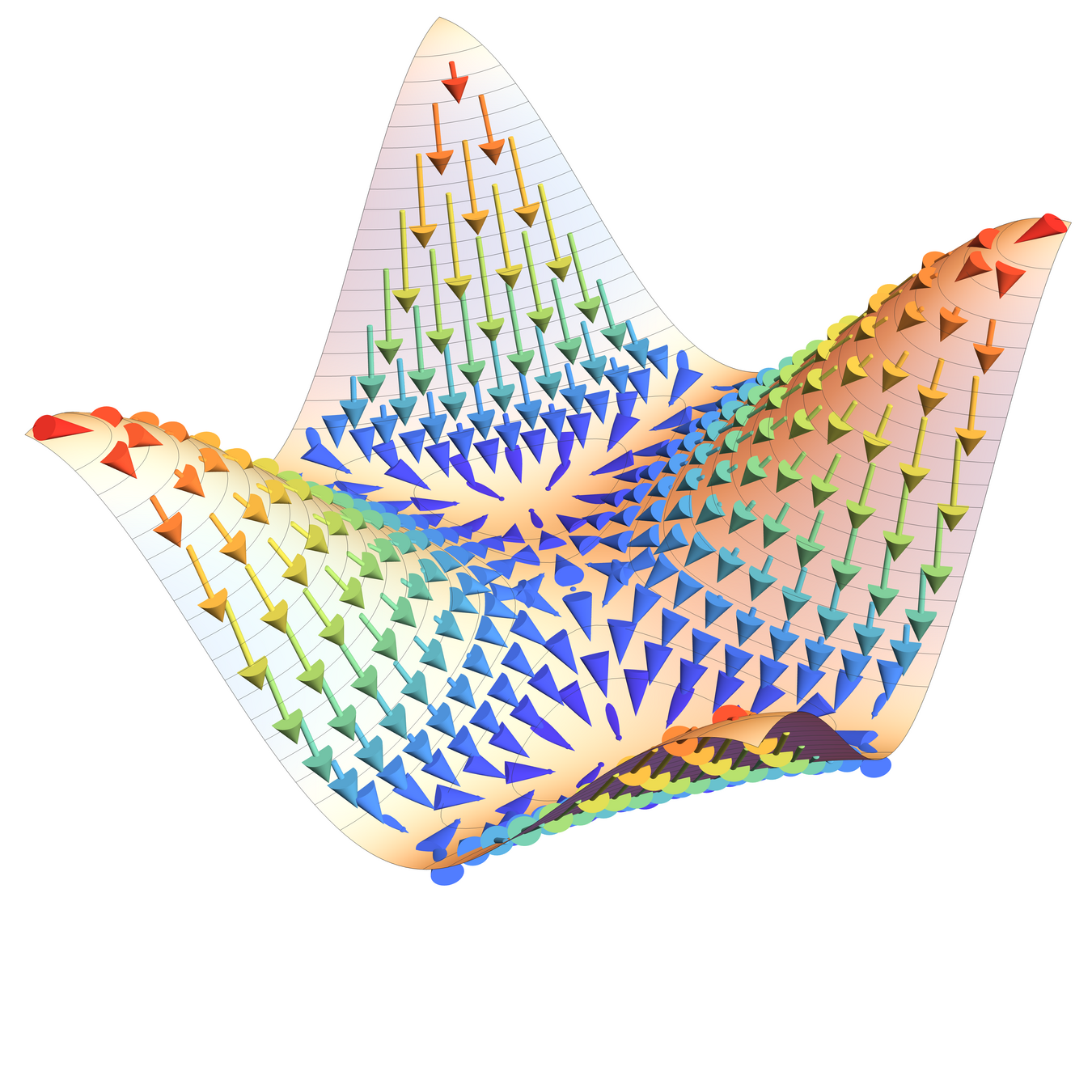
Consider the initial value problem
\(\Gamma(F_0,0) = F_0, \qquad \frac{d}{dt}\Gamma(F_0,t) = -\operatorname{grad}\operatorname{FP}(\Gamma(F_0,t))\).
If \(F_0\) has full spark, then \(\lim_{t \to \infty} \Gamma(F_0,t)\) is a FUNTF.
Theorem [with Needham]
Same for fusion frames.
\(F \mapsto FF^*\) is the momentum map of the diagonal \(SU(d)\) action on \(\prod_{i=1}^N \mathbb{CP}^{d-1}\).
\(\Longrightarrow\) \(\operatorname{FP}(F) = \|FF^*\|_{\operatorname{Fr}}^2\) is the squared norm of a momentum map.
Frances Kirwan
Gert-Martin Greuel [CC BY-SA 2.0 DE], from Oberwolfach Photo Collection
Image by rawpixel.com on Freepik
Theorem [Kirwan]
Reductive algebraic group action on Kähler manifold \(\Longrightarrow\) semistable points flow to global minima.
This kind of function is really nice!
The GIT quotient consists of group orbits which can be distinguished by \(G\)-invariant (homogeneous) polynomials.
\(\mathbb{C}^* \curvearrowright \mathbb{CP}^2\)
\(t \cdot [z_0:z_1:z_2] = [z_0: tz_1:\frac{1}{t}z_2]\)
Roughly: identify orbits whose closures intersect, throw away orbits on which all polynomials vanish.
\( \mathbb{CP}^2/\!/\,\mathbb{C}^* \cong\mathbb{CP}^1\)
Definition.
Given a reductive group \(G\) acting algebraically on a vector space \(V\), a vector \(v \in V\) is unstable if \(0 \in \overline{G \cdot v}\); otherwise, \(v\) is semi-stable.
Example.
For UNFs, \(G = \operatorname{SL}(d)\), \(V = (\mathbb{K}^d)^{\otimes N}\),
\(g \cdot (v_1 \otimes \cdots \otimes v_N) = (gv_1) \otimes \cdots \otimes (gv_N)\)
Metatheorem [cf. Kirwan]
Hilbert–Mumford Criterion.
\(v \in V\) is semi-stable \(\Longleftrightarrow\) there exists a 1-parameter subgroup \(\lambda: \mathbb{C}^* \to G\) so that
\(\lim_{t \to 0}\lambda(t) \cdot v = 0\).
Example.
What other functions of interest arise as squared norms of momentum maps?
Fusion frame homotopy and tightening fusion frames by gradient descent
Tom Needham and Clayton Shonkwiler
Journal of Fourier Analysis and Applications, to appear
Three proofs of the Benedetto–Fickus theorem
Dustin Mixon, Tom Needham, Clayton Shonkwiler, and Soledad Villar
Sampling, Approximation, and Signal Analysis (Harmonic Analysis in the Spirit of J. Rowland Higgins), Stephen D. Casey, M. Maurice Dodson, Paulo J. S. G. Ferreira and Ahmed Zayed, eds., to appear
By Clayton Shonkwiler




