














Clayton Shonkwiler PRO
Mathematician and artist
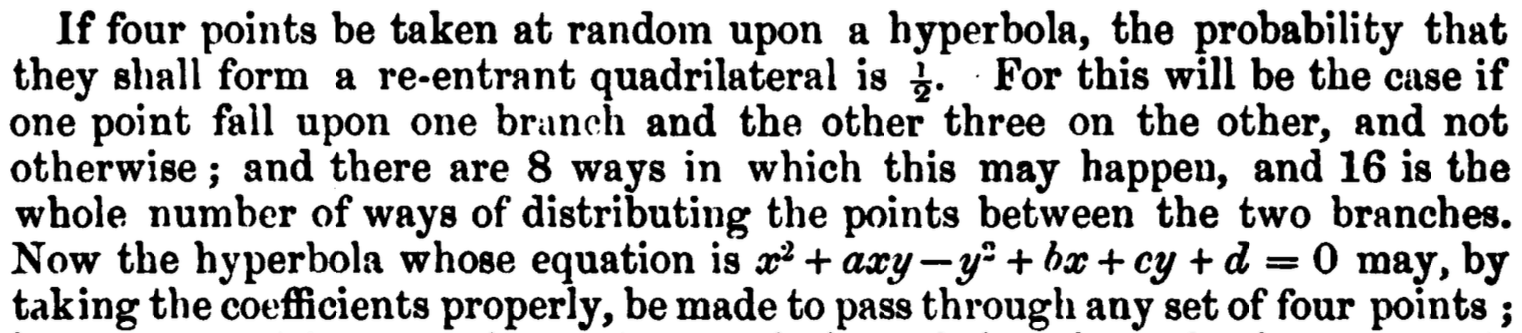
W. S. B. Woolhouse, Educational Times 18 (1865), p. 189
J. J. Sylvester, Educational Times 18 (1865), p. 68
W. S. B. Woolhouse, The Lady's and Gentleman's Diary 158 (1861), p. 76
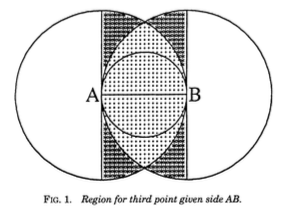
Suppose \(AB\) is the longest side. Then
\(\mathbb{P}(\text{obtuse})=\frac{\pi/8}{\pi/3-\sqrt{3}/4} \approx 0.64\)
But if \(AB\) is the second longest side,
\(\mathbb{P}(\text{obtuse}) = \frac{\pi/2}{\pi/3+\sqrt{3}/2} \approx 0.82\)
Probability \(p\)
\(p\)
\(p\)
\(p\)
\(p\)
Uh oh!
There is no way to choose points randomly in the plane so that the probability that a point lies in a region depends only on the size of the region.
Fancier Version
The uniform measure on the plane is not a probability measure.
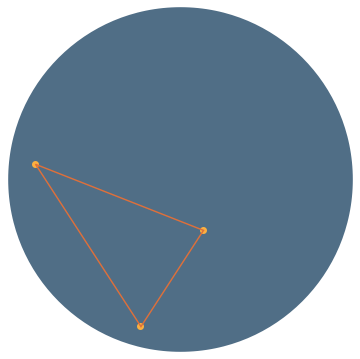
Choose three vertices uniformly in the disk:
\(\mathbb{P}(\text{obtuse})=\frac{9}{8}-\frac{4}{\pi^2}\approx 0.7197\)
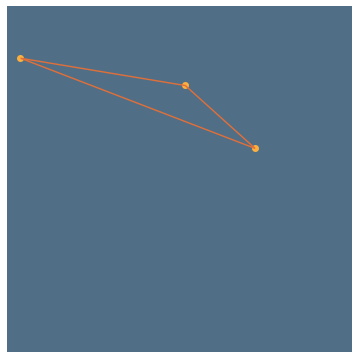
Choose three vertices uniformly in the square:
\(\mathbb{P}(\text{obtuse})=\frac{97}{150}-\frac{\pi}{40}\approx 0.7252\)
J.J. Sylvester, Educational Times, April 1864
J.J. Sylvester, Phil. Trans. R. Soc. London 154 (1864), p. 654, footnote 64(b)
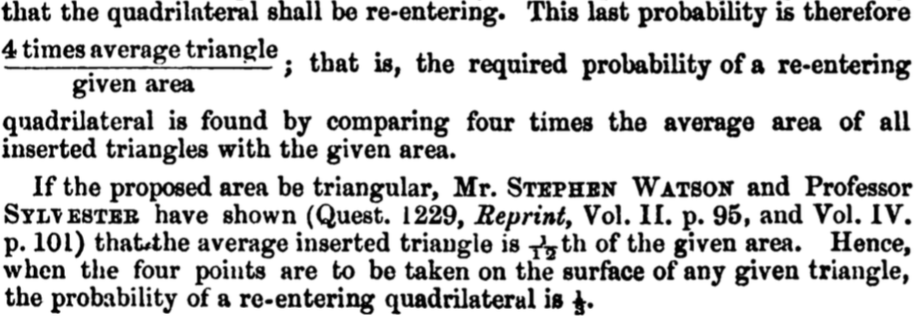
W.S.B. Woolhouse, Mathematical Questions with Their Solutions VII (1867), p. 81
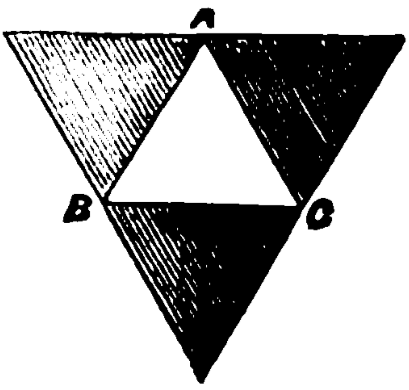
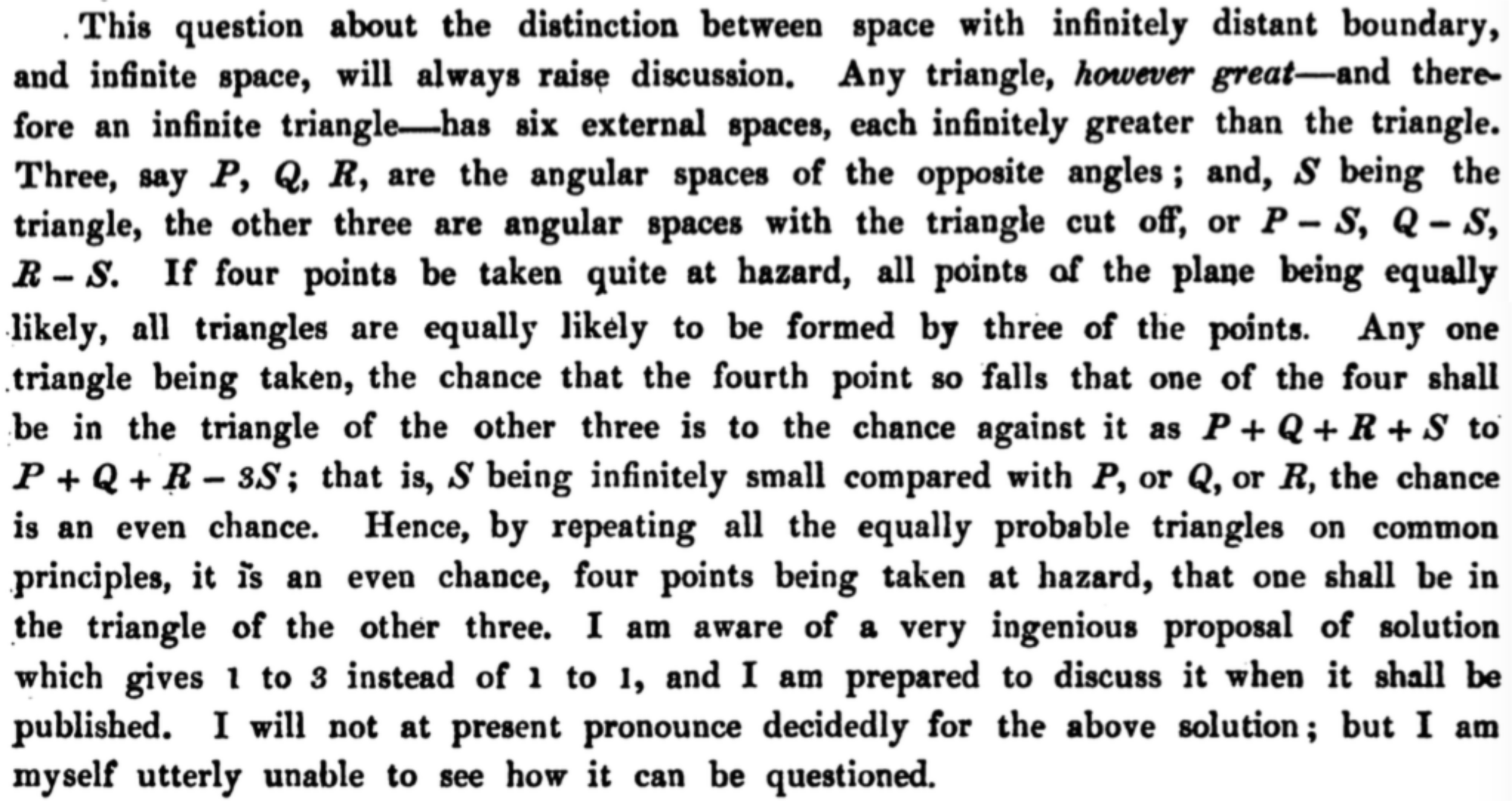
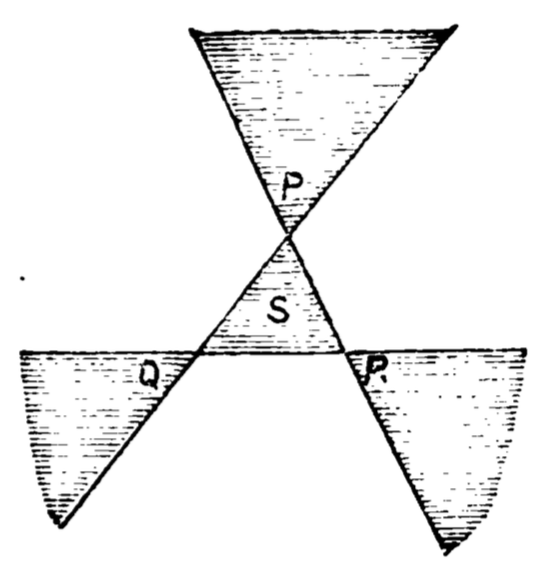
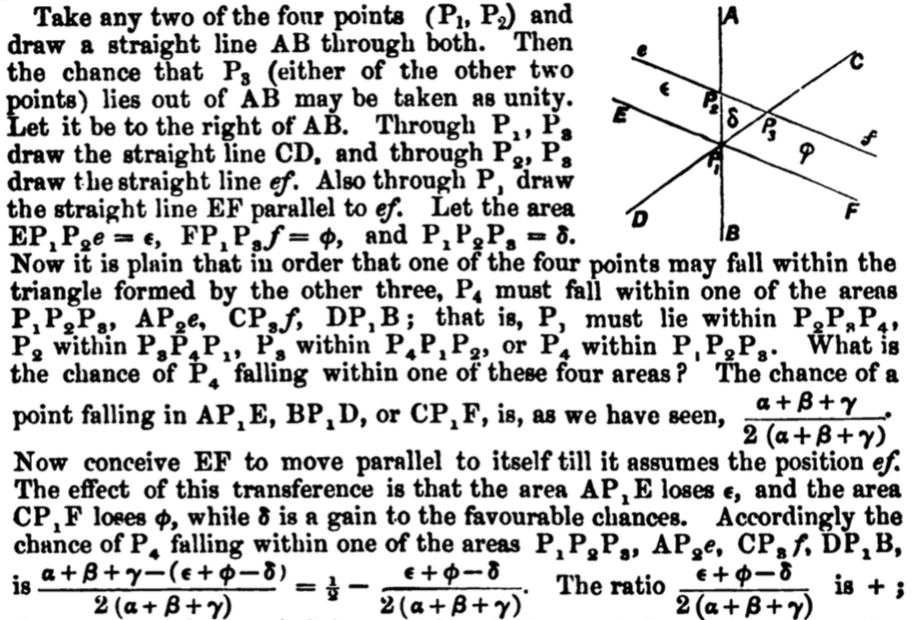
A. De Morgan, Trans. Cambridge Phil. Soc. XI (1871), pp. 147–148
W.S.B. Woolhouse, Mathematical Questions with Their Solutions VI (1866), p. 52
C.M. Ingleby, Mathematical Questions with Their Solutions V (1865), p. 82
G.C. De Morgan, Mathematical Questions with Their Solutions V (1865), p. 109
W.S.B. Woolhouse, Mathematical Questions with Their Solutions VI (1866), p. 52
W.S.B. Woolhouse, Mathematical Questions with Their Solutions VIII (1868), p. 105
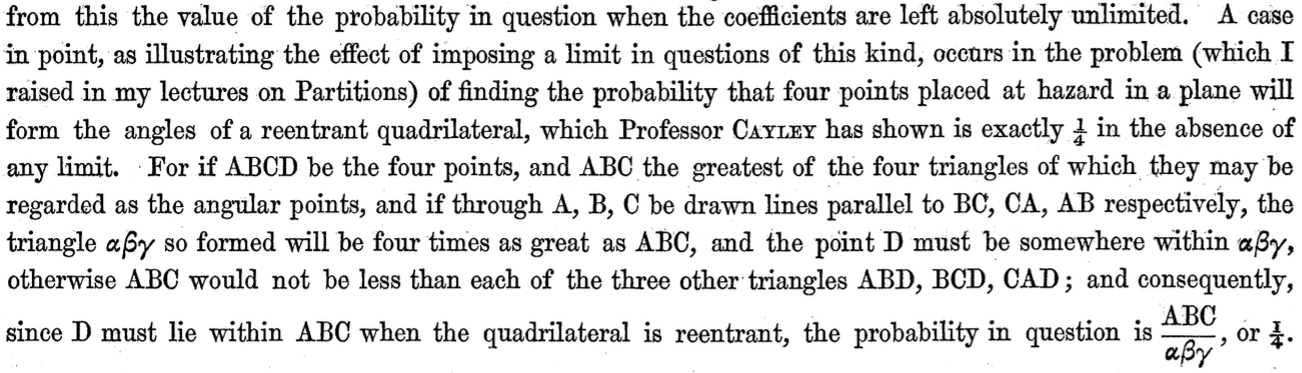
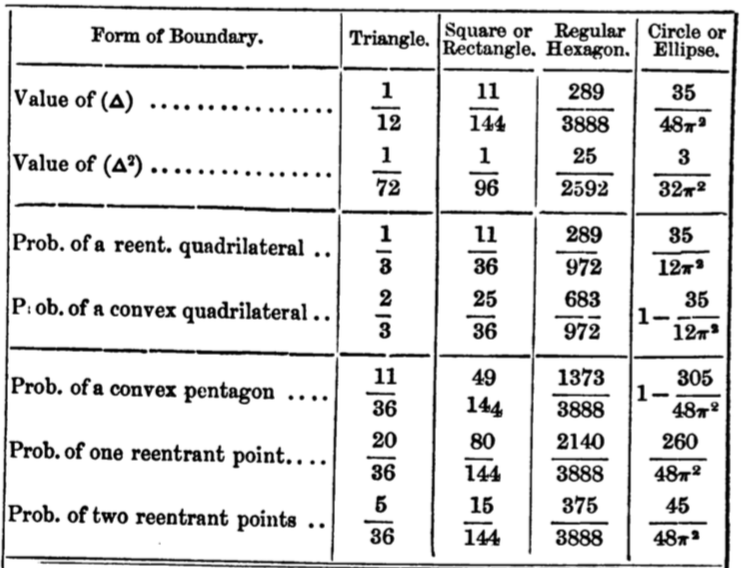
\(\mathbb{P}(\text{reflex})=\frac{1}{3}\)
\(\mathbb{P}(\text{reflex})=\frac{35}{12\pi^2}\approx 0.296\)
Theorem [Blaschke, 1917]
\(\frac{35}{12\pi^2}\leq\mathbb{P}(\text{reflex})\leq\frac{1}{3}\)
J.M. Wilson, Mathematical Questions with Their Solutions V (1866), p. 81
W.A. Whitworth, Mathematical Questions with Their Solutions VIII (1868), p. 36
Report on J.J. Sylvester’s presentation of his paper “On a Special Class of Questions on the Theory of Probabilities” to the British Association for the Advancement of Science, 1865
Are these questions really about choosing random points, or are they actually about choosing random polygons?
How would you choose a polygon “at random”?
— Stephen Portnoy, Statistical Science 9 (1994), 279–284
The space of all \(n\)-gons should be a nice space \(P_n\) with a transitive symmetry group. We should use the invariant probability measure on \(P_n\). Then we should compute the measure of the subset of \(n\)-gons satisfying our favorite condition.
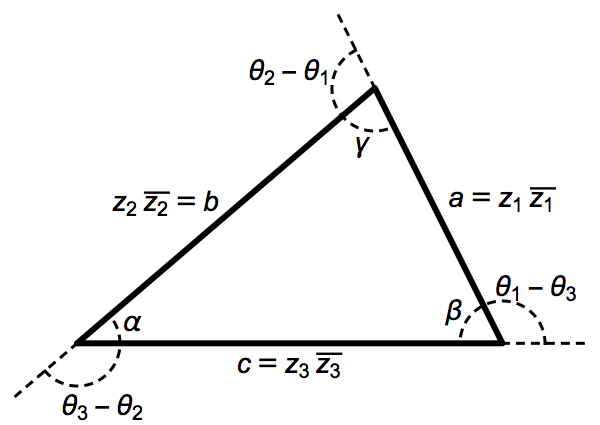
Let \(e_1, \ldots , e_n\) be the edges of a planar \(n\)-gon with total perimeter 2. Choose \(z_1, \ldots , z_n\) so that \(z_k^2 = e_k\). Let \(z_k = u_k + i v_k\).
The polygon is closed \(\Leftrightarrow e_1 + \ldots + e_n = 0\)
\(\sum e_k =\sum z_k^2 = \left(\sum u_k^2 - \sum v_k^2\right) + 2i \sum u_k v_k\)
The polygon is closed \(\Leftrightarrow \|\vec{u}\|=\|\vec{v}\|\) and \(\vec{u} \bot \vec{v}\)
Since \(\sum |e_k| = \sum u_k^2 + \sum v_k^2 = \|\vec{u}\|^2 + \|\vec{v}\|^2\), we see that \((\vec{u},\vec{v})\) is an orthonormal pair of vectors in \(n\)-dimensional space; the collection of such things is called a Stiefel manifold.
Proposition: Rotating \((\vec{u},\vec{v})\) in the plane it spans rotates the corresponding \(n\)-gon twice as fast.
Corollary [Hausmann–Knutson]
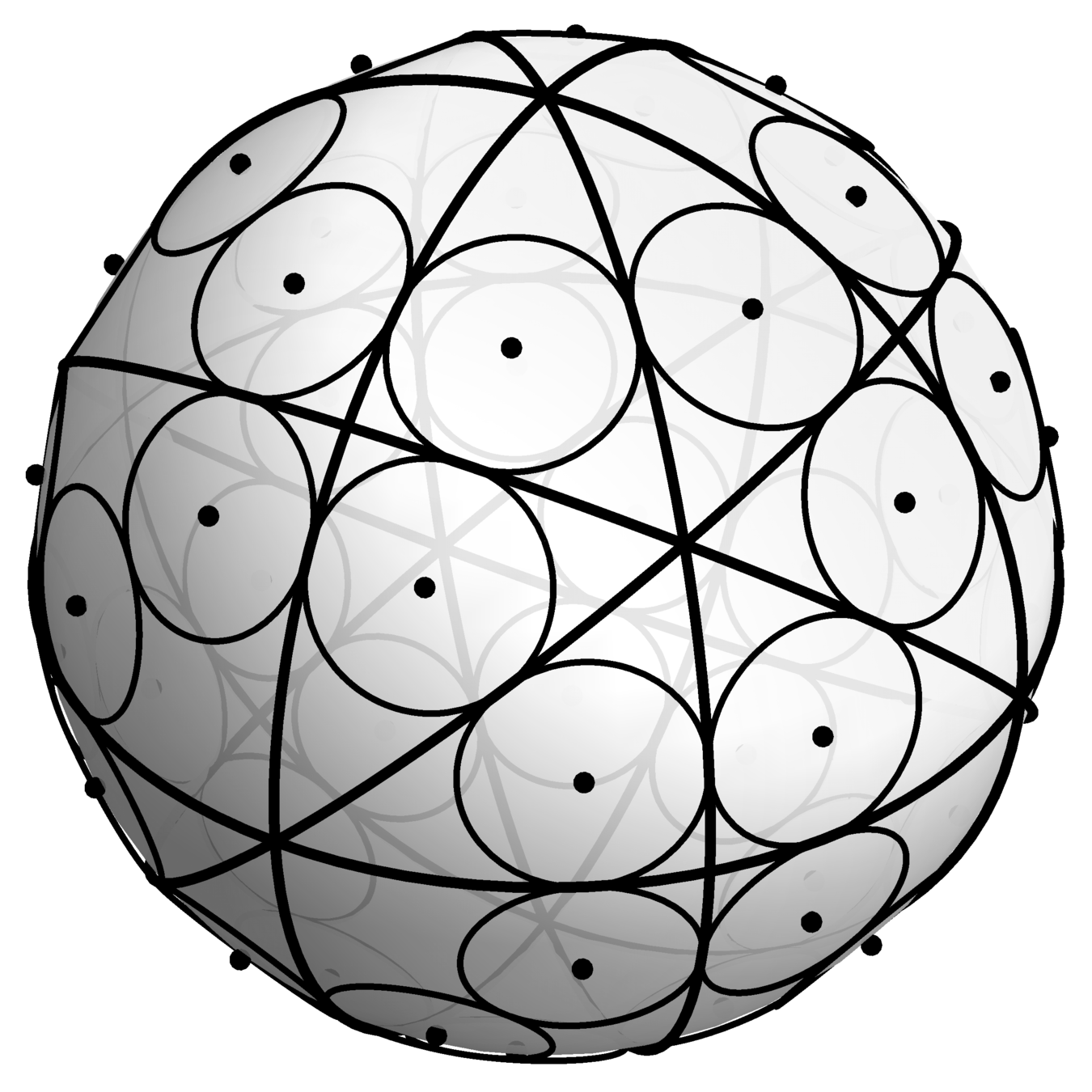
The \(n\)-gons of perimeter 2 correspond to the collection of planes in \(n\)-dimensional space. This collection is called a Grassmann manifold.
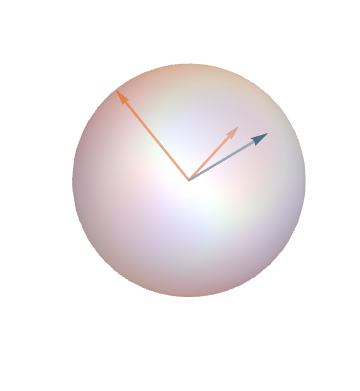
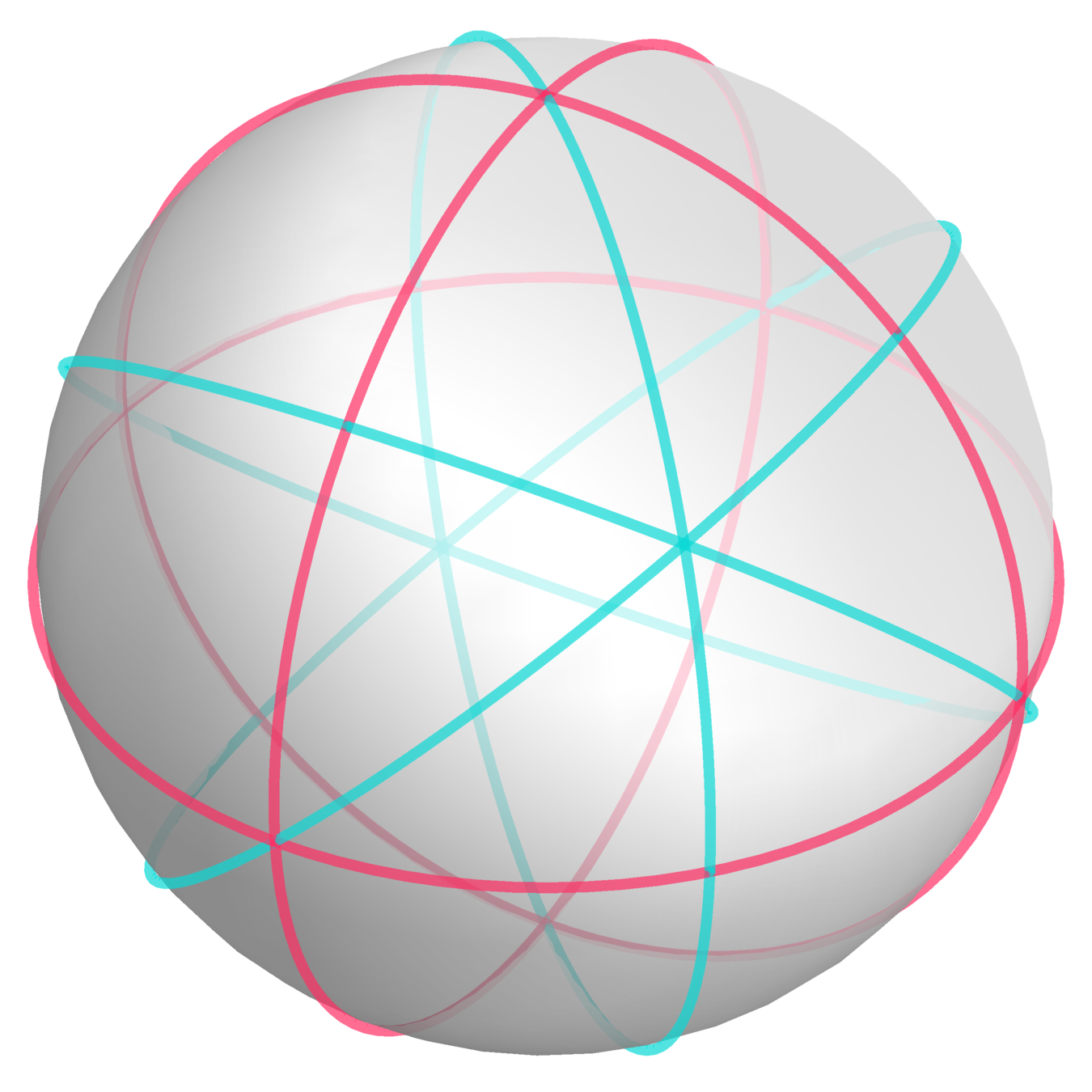
A triangle corresponds to a plane in \(\mathbb{R}^3\) with orthonormal basis \((\vec{u},\vec{v})\)...
or, equivalently, the line through
\(\vec{p}=\vec{u}\times \vec{v}\)
so
The rotations are natural transformations of the sphere, and the corresponding action on triangles is natural.
\(c=1-z^2\) fixed
\(z\) fixed
\(C(\theta) = (\frac{z^2+1}{2}\cos 2\theta, z \sin 2\theta)\)
The equal-area-in-equal-time parametrization of the ellipse
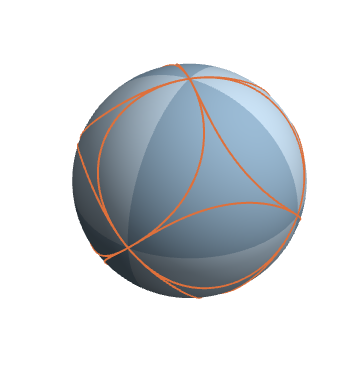
The right triangles are exactly those satisfying
\(a^2+b^2=c^2\) & permutations
Since \(a=1-x^2\), etc., the right triangles are determined by the quartic
\((1-x^2)^2+(1-y^2)^2=(1-z^2)^2\) & permutations
\(x^2 + x^2y^2 + y^2 = 1\), etc.
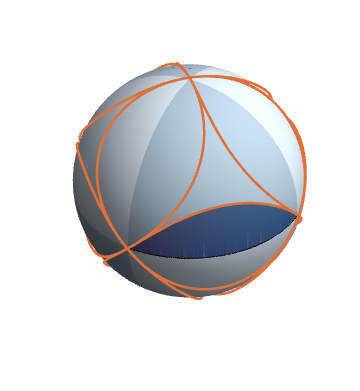
\(\mathbb{P}(\text{obtuse})=\frac{1}{4\pi}\text{Area} = \frac{24}{4\pi} \int_R d\theta dz\)
But now \(C\) has the parametrization
And the integral reduces to
By Stokes’ Theorem
\(\frac{6}{\pi} \int_R d\theta dz=\frac{6}{\pi}\int_{\partial R}z d\theta = \frac{6}{\pi}\left(\int_{z=0} zd\theta + \int_C zd\theta \right)\)
\(\left(\sqrt{\frac{1-y^2}{1+y^2}},y,y\sqrt{\frac{1-y^2}{1+y^2}}\right)\)
\(\frac{6}{\pi} \int_0^1 \left(\frac{2y}{1+y^4}-\frac{y}{1+y^2}\right)dy\)
Theorem [with Cantarella, Needham, Stewart]
With respect to the symmetric measure on triangles, the probability that a random triangle is obtuse is
\(\frac{3}{2}-\frac{3\ln 2}{\pi}\approx0.838\)
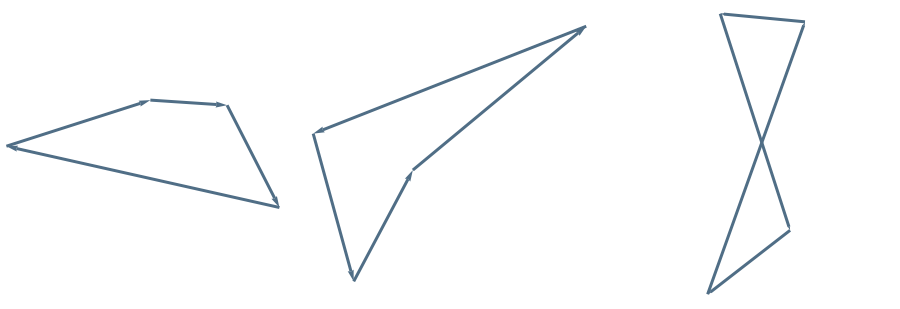
convex
reflex/reentrant
self-intersecting
Modern Reformulation: What is the probability that all vertices of a random quadrilateral lie on its convex hull?
Theorem [with Cantarella, Needham, Stewart]
Convex, reflex, and self-intersecting quadrilaterals are all equiprobable.
Symmetric triangles
Isosceles
triangles
Degenerate
triangles
Theorem [with Bowden, Haynes, Shukert]
The least symmetric triangle has side length ratio
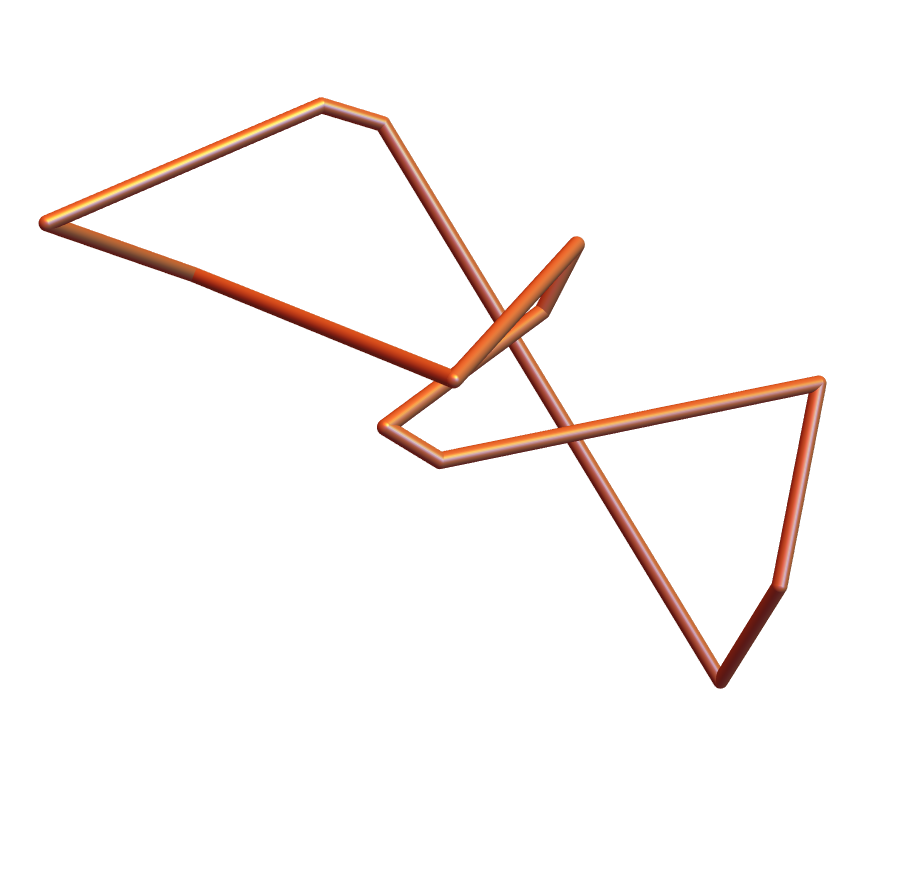
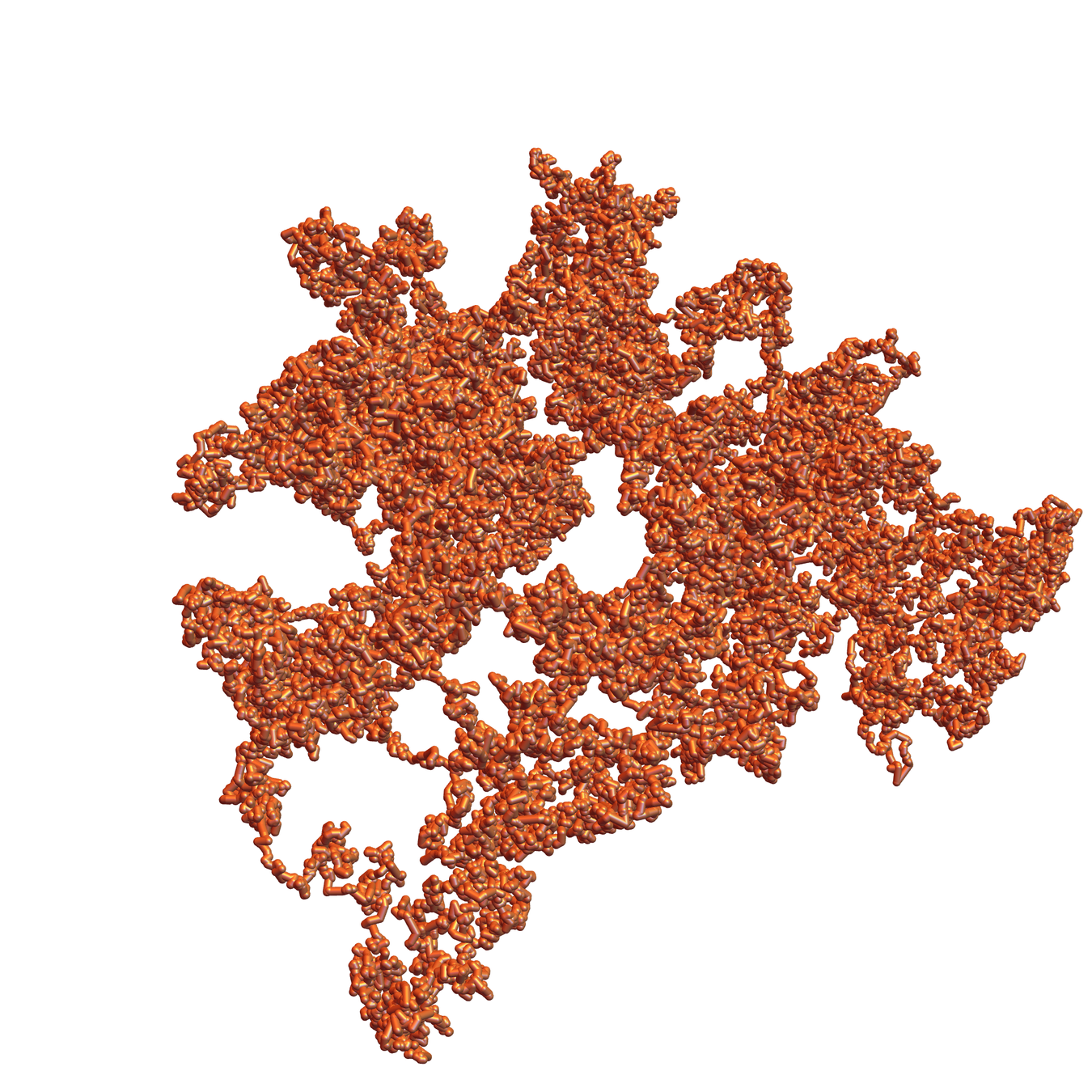
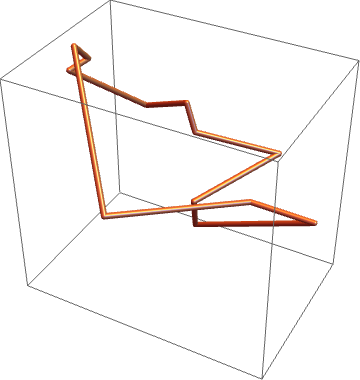
There is a version of this story for \(n\)-gons in space as well.
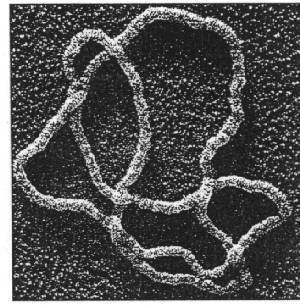
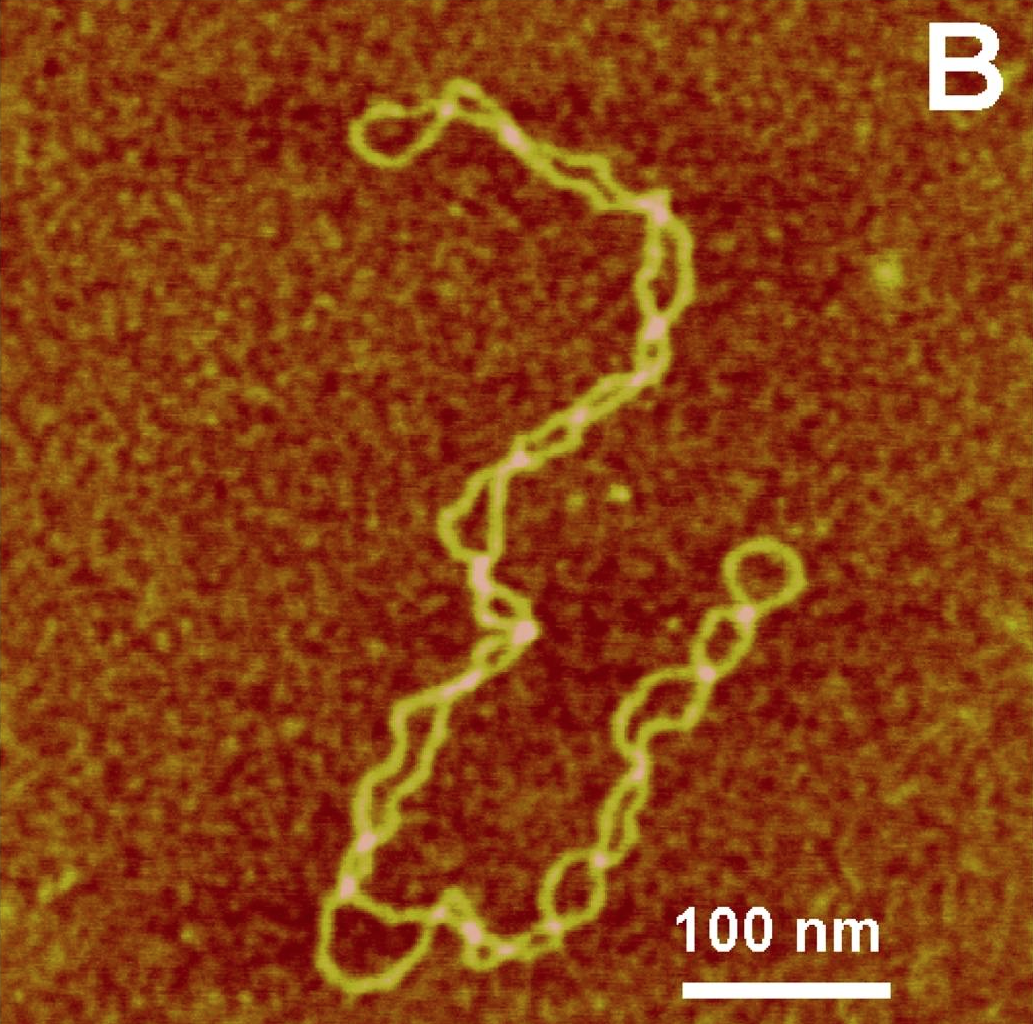
Polygons in space provide a foundational theoretical and computational model for ring polymers like bacterial DNA.
Wassermann et al., Science 229, 171--174
Lyubchenko, Micron 42, 196--206
Polygons in \(\mathbb{R}^3\) correspond to points in \(G_2(\mathbb{C}^n)\) and the analog of the squaring map is the Hopf map.
By Clayton Shonkwiler
For MATH 161




