Dexterous Control of
Optical Microrobots in Liquid Medium
Sinan Haliyo, Institut des Systèmes Intelligents et de Robotique
Edison Gerena, MovaLife Microrobotics

ISIR - Sorbonne Université
L'Institut des Systèmes Intelligents et de Robotique
Paris, France

Robotic Optical Tweezers
- A tightly focused laser beam to trap micro objects (1 - 5 µm)
- Non-contact multi object manipulation in liquid
- Laser wavelength : 1070nm
- Laser power: 400mW
3D force measurement :
- Position tracking with an Event-Camera
- ~ 10 pn resolution, 300 pN max
- 300 Hz / 1 kHz bandwidth

3D motion and sensing
Haptic feedback improves trajectory precision and task duration
Gerena et al, Micromachines 2019
Time-shared Multitraps
Gerena et al, IEEE Robotics and Automation Letters, 2019Multitrap OPTOBOTS

Gerena et al, IEEE Robotics and Automation Letters, 2019Force-sensing Optobot
In-liquid assembly
Your Hand
in the microscale
Deep Learning for tracking and force sensing
Ferhat SADAK

T-cell / Cancer
interaction forces

Nicolas INACIO

Mecanobiology on gametes
An interactive scientific instrument
An interactive scientific instrument
Biomedical applications & microassembly
Interactive exploration, manipulation and characterization at small scales with micrometer & piconewton resolution
Transscale coupling and natural interaction
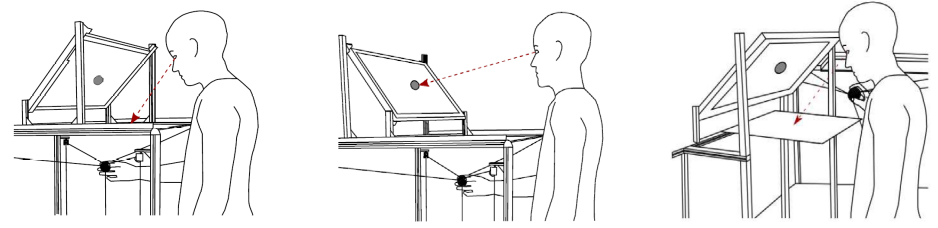
Force-feedback user interface
Combinable with field-effect manipulation
Flow-control, dielectrophoresis, acoustics...
Optical Robots-MARSS24
By Sinan Haliyo



