Interactive Microrobotics
novel scientific instruments for biology
Sinan Haliyo, head of MULTI-SCALE INTERACTIONS @ ISIR

ISIR - Sorbonne Université
L'Institut des Systèmes Intelligents et de Robotique
Paris, France
ISIR - Sorbonne Université
L'Institut des Systèmes Intelligents et de Robotique
Permanent Staff:
- 41 professors
- 16 researchers
- 10 Administrative + technical staff
Non permanent staff, typically:
- 120 PhD students
- 20 postdocs, engineers, support staff
- 10 affiliated members (emeritus, visitors, etc.)
- 70 interns, yearly

Multi-Scale Interactions Lab

Mokrane Boudaoud
David Gueorguiev


Sinan Haliyo
Vincent Hayward

Stéphane Régnier

Gilles Bailly

Edison Gerena

Baptiste Caramiaux

Julien Gori
8 permanent researchers + 15 PhD students + 4 Post-Doc/Ing/others

Robotic tools
for microscale
Effectors, grippers, probes,
actuators, sensors
Human—Machine Interfaces
Observation & Interaction
Usability, adaptation, skill acquisition

Micromanipulation in prehistory
Haliyo et al, Adhesion based dynamic micro-manipulation. European Journal of Mechanics - 2003
Xie, Haliyo, Regnier. Parallel imaging/manipulation force microscopy. Applied Physics Letters, 2009How to improve user implication for better task efficiency ?
Leverage human sensorimotor skill in the control loop
Force-feedback teleoperation
Teleoperated micromanipulation
Venture et al Force-feedback micromanipulation with unconditionally stable coupling.IEEE/RSJ IROS 2005
Bolopion et al. Tuning the gains of haptic coupling in nanorobotics. 2009 IEEE ICRA, 2009
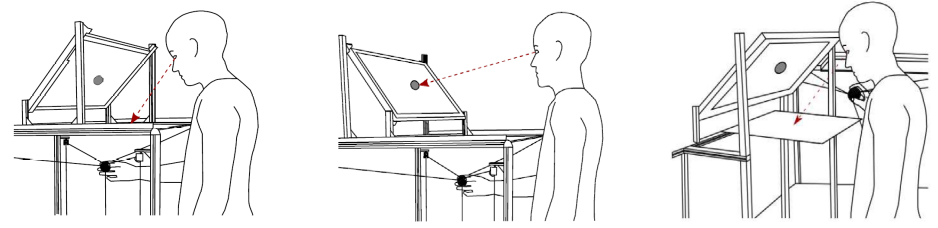
Haptic Microscopy
High Fidelity Force-sensing
Transparent haptic rendering
Extending the sense of touch to the microscale
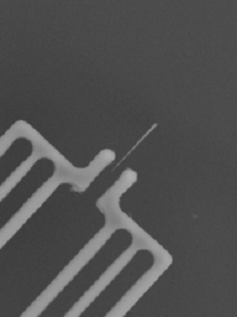
Abdenbi
OUSAID

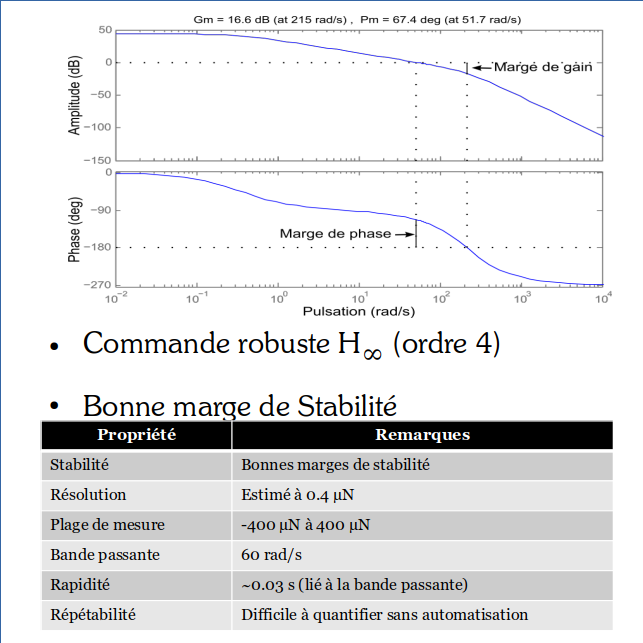
- Direct 1 dof sensing
- Closed loop active control
- Electrostatic actuation
- Contactless
- Linear behavior
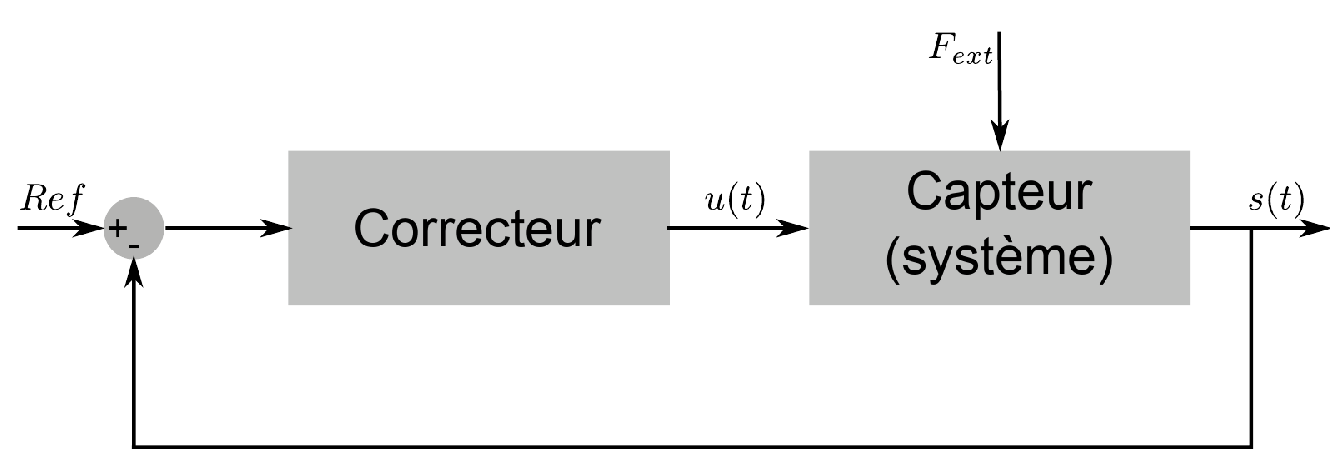
Ousaid et al, IEEE Systems and Control, 2013
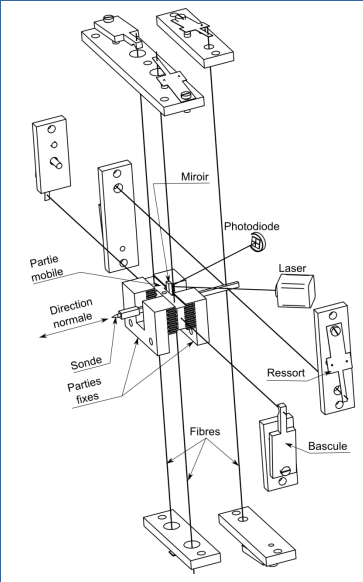
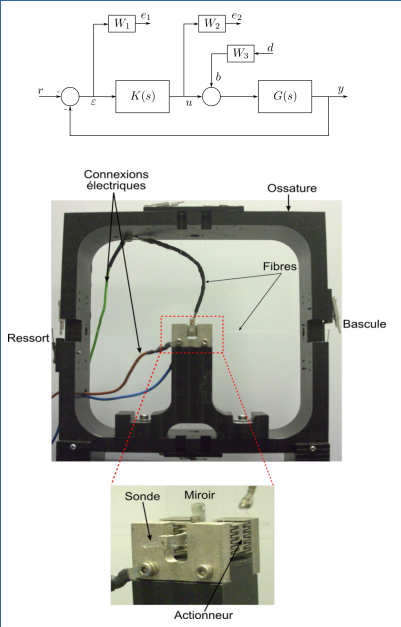
High-Fidelity Haptics
-
Nil mass
-
Infinite Stiffness
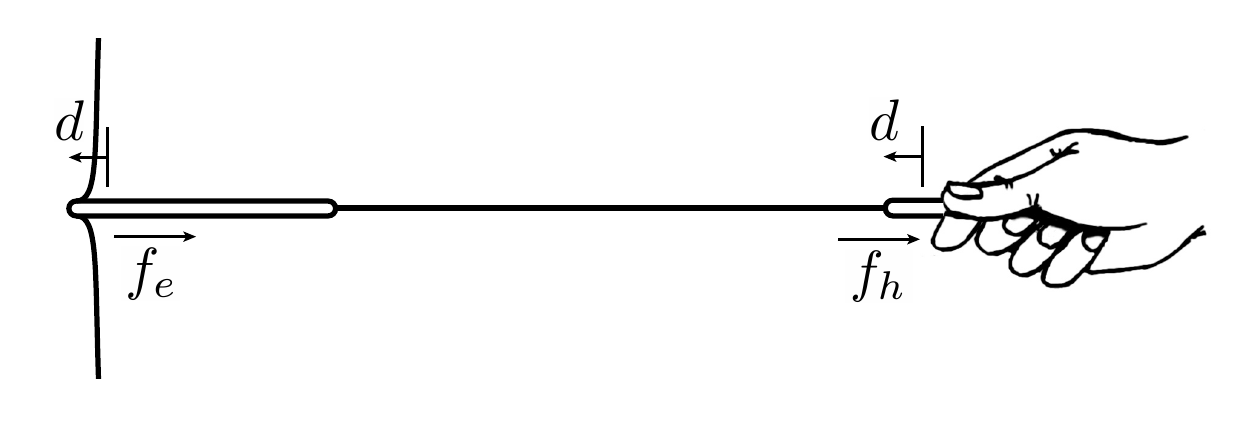
Hybrid actuation profiles
Eliminate the inertia
Increase the torque

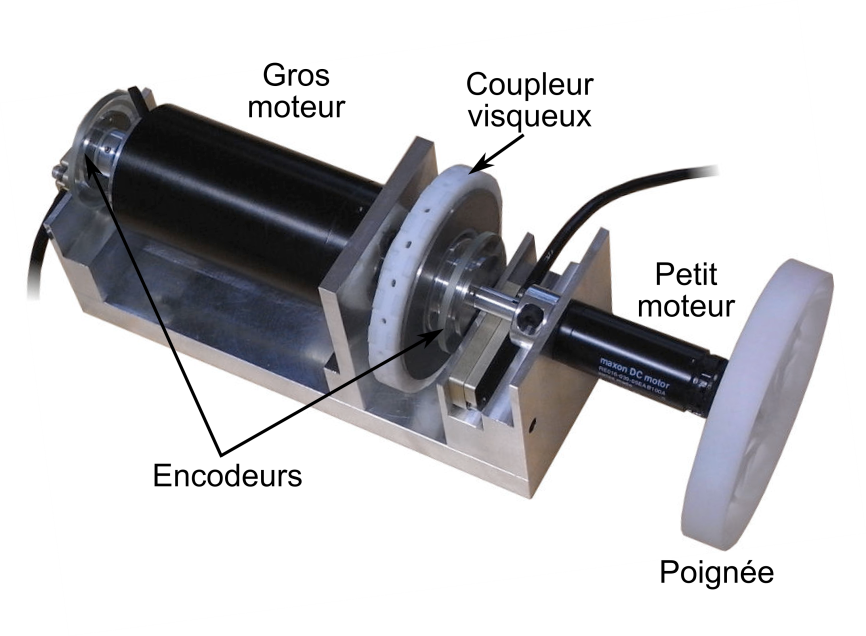
C_{OUT} = C_{petit} + b \times (\omega_{petit} - \omega_{grand})
Ousaid et al, IEEE Transactions on Mechatronics, 2015
Ousaid et al, PloS one 2014
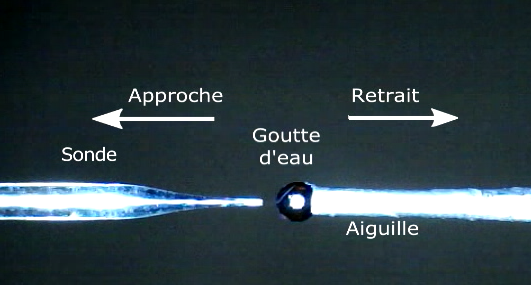
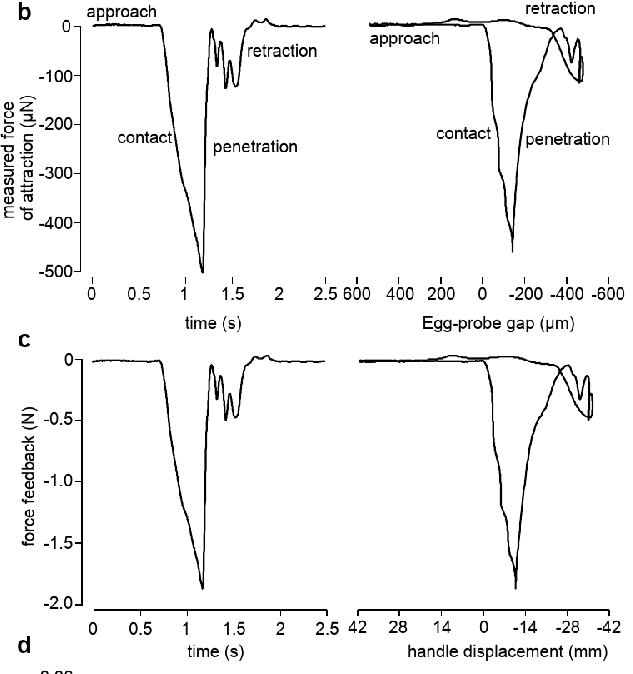
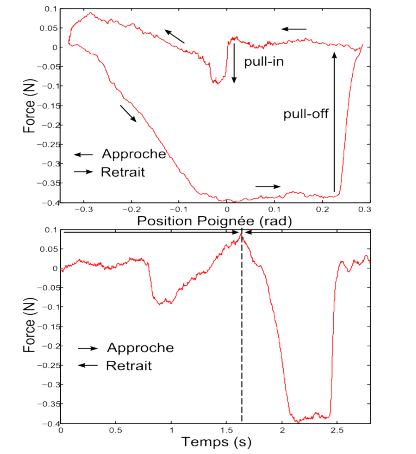
Linear upscaling of interaction forces x10000
Ousaid et al, IEEE Robotics and Automation Letters, 2019
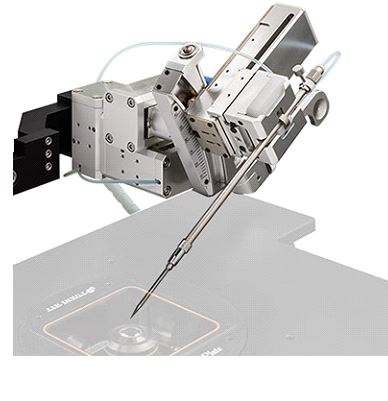
Haptic feedback facilitates injection
In-vitro manipulation of biologic samples / single-cell
Experimental biology
Applications
- Biochemical & biophysics research
- Clinical studies
- Pharmaceutical evaluation of
- Transgenetics, stem cells
- In-vitro fertilization
- Cellular diagnostic, toxicity analysis...
Required functions
- Transport: translate / rotate
- Interacting cells / bacteria / tumors...
- Mechanical, electrical, chemical characterizations
- Injection & Extraction

In-vitro manipulation of biologic samples
Mechanical manipulators and pipettes
- Pipette and injector holders
- Linear stages in serial configuration
- Mechanical action through direct contact
- Open chambers / petri dishes
Global Market on micromanipulation for bio
hospitals, clinics & research labs


Mechanical manipulators and pipettes
Weakness of current solutions
Lack of skilled labor & Low evolution of tools in last 40 years
-
Rudimentary interfaces
-
Technical expertise and manual dexterity
-
High training cost of lab technicians
Techniques poorly adapted to new needs:
- Full containment and environmental control
- Lab-on-chip, microfluidic chips
- Accurate access to an isolated specimen / single cell
- Data collection



Robotic Optical Tweezers
- A tightly focused laser beam to trap micro objects (1 - 5 µm)
- Non-contact multi object manipulation in liquid
- Laser wavelength : 1070nm
- Laser power: 400mW
3D force measurement :
- Position tracking with an Event-Camera
- ~ 10 pn resolution, 300 pN max
- 300 Hz / 1 kHz bandwidth

Edison
GERENA
3D motion and sensing

The "robot" is the laser path actuated with active Optical components and 3DoF sample-holder
Multitrap OPTOBOTS

Gerena et al, IEEE Robotics and Automation Letters, 2019Force-sensing Optobot
Deep Learning for tracking and force sensing
Ferhat SADAK

Haptic feedback improves trajectory precision and task duration
Gerena et al, Micromachines 2019Your Hand
in the microscale
In-liquid assembly
T-cell / Cancer
interaction forces

Nicolas INACIO

Mecanobiology on gametes
An interactive scientific instrument
Robotic assistance for biologists
-
Decrease training cost and duration
-
Decrease task duration
Modern analysis tools for clinical research
- 6D single-cell Manipulation in-vitro, in incubator
- Decrease the pollution and variability of experimental conditions
- Database Generation ↦ IA and ML tools for analysis
An interactive scientific instrument
Opportunities
Open positions for
PhD, Post-Doc, Research Engineer
(French is not required !)
sinan.haliyo@sorbonne-universite.fr
MARSS23
By Sinan Haliyo



