
Stefan Sommer
Professor at Department of Computer Science, University of Copenhagen
Faculty of Science, University of Copenhagen
Stefan Sommer
Department of Computer Science, University of Copenhagen
\( \phi \)
Session 1: (L 9-9:45) Shape analysis and actions of the diffeomorphism group
Session 2: (E 10-10:45) Landmark analysis in Theano Geometry
Session 3: (L 11-11:45) Linear representations and random orbit model
Session 4: (E 12:30-13:15) Landmarks statistics in Theano Geometry
Session 5: (L 13:30-14:15) Shape spaces of images, curves and surfaces
Session 6: (E 14:30-15:15) Analysis of continuous shapes
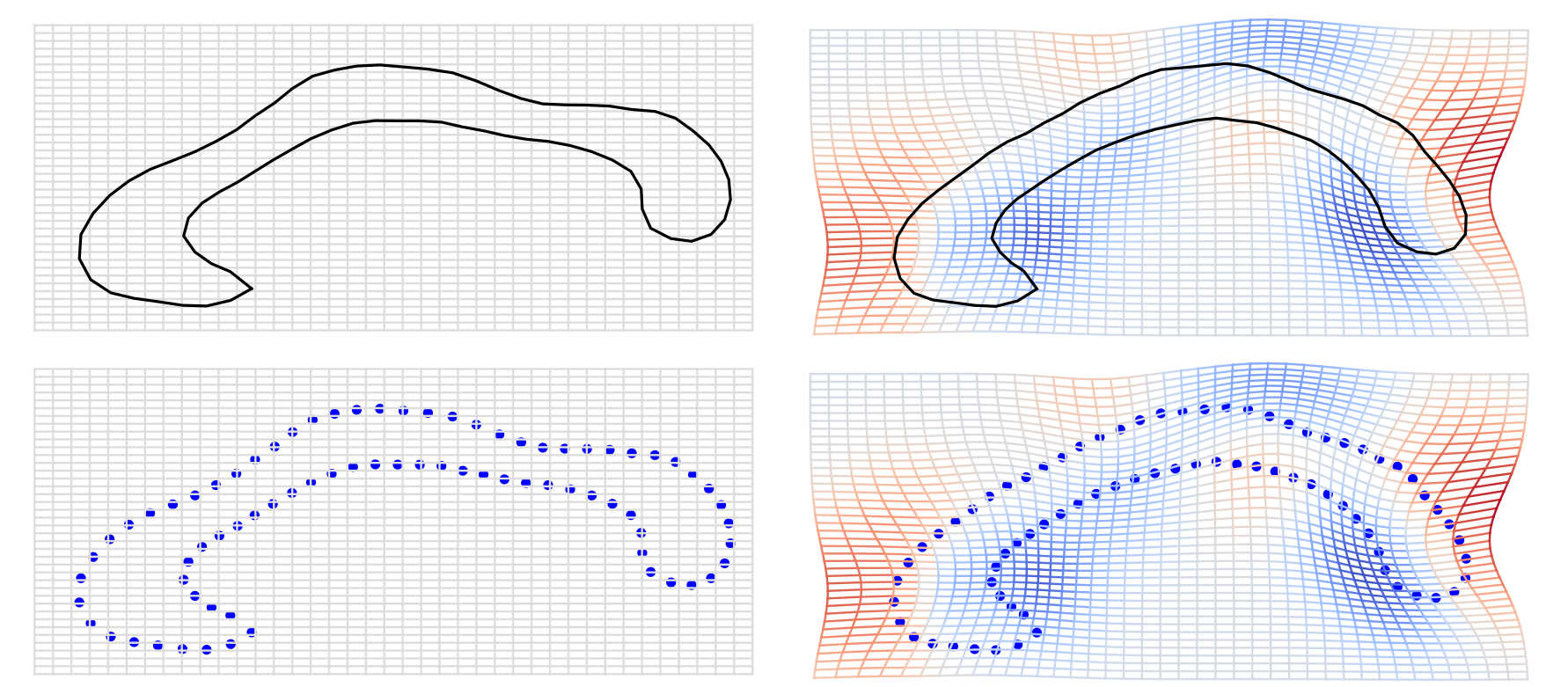
Objects on which the diffeomorphism group acts
\(d=2,3\)
matching problem, image registration:
\[E_{s_0,s_1}(\phi)=\mathrm{min}_{\phi_t}R(\phi_t)+\frac1\lambda S(\phi_T.s_0,s_1)\]
Dissimilarity measure:
\(S(I^0,I^1)=\int_\Omega|I^0(x)-I^1(x)|^2dx\)
or mutual information or similar
\(I^0\) moving image: \(\phi_t.I^0\) \(I^1\) fixed image
landmarks can be matched precisely, images generally cannot: lack of transitivity of \(G\)-action
matching problem, image registration:
\[E_{s_0,s_1}(\phi)=\mathrm{min}_{\phi_t}R(\phi_t)+\frac1\lambda S(\phi_T.s_0,s_1)\]
Optimal flows \(\phi_t\) for \(E\) with
\(R(\phi_t):=\int_0^T\|\partial_t \phi_t\|_{\phi_t}^2dt\), \(v_t=\partial_t\phi_t\circ\phi_t^{-1}\)
are geodesics on \(G=\mathrm{Diff}(\Omega)\)
Geodesic equation:
General form of geodesic equation:
\[\frac{d}{dt} \frac{\delta l}{\delta v}+\mathrm{ad}^*_v \frac{\delta l}{\delta v}=0\]
Valid for all shape space (only shape action varies)
Uses right invariance of metric on \(G\):
\(\|\partial_t\phi_t\|_{\phi_t}=\|v_t\|\), \(v_t=\partial_t\phi_t\circ\phi_t^{-1}\)
The (infinite dimensional) variable \(\phi_t\) is reduced
Lagragian to Eulerian coordinate change in fluid systems
\[\frac{\partial m}{\partial t} + v \cdot \nabla m + \nabla v^T \cdot m + m \nabla \cdot v = 0\]
Path straigthening: Gradient descent on \(v_t\)
\[v_t^{k+1}=v_t^k-\epsilon\nabla_{v_t}E(v_t)|_{v_t=v_t^k}\]
swipe back and forth between t=0 and t=T
Shooting: use that geodesic path is determined by \(v_0\)
\[v_0^{k+1}=v_t^k-\epsilon\nabla_{v_0}E(v_0)|_{v_0=v_0^k}\]
use adjoint equations for transporting
\(\nabla_{\phi_T} S(\phi_T.s^0,s^1)\) to \(\nabla_{v_0}S(\phi_T.s^0,s^1)\)
(backpropagation)
Both schemes are numerically challenging
curves: \(\gamma:\mathbb{S}^1\to\mathbb{R}^d\), surfaces: \(\gamma:\mathbb{S}^2\to\mathbb{R}^d\)
Similarity \(S(\gamma^0,\gamma^1)=\int_{\mathbb{S}^1}\|\gamma^0(\theta)-\gamma^1(\theta)\|^2d\theta\) is dependent on parametrizations of \(\gamma^0\) and \(\gamma^1\)
Current metric provides invariant metric on curves and surfaces:
RKHS on \(\Omega\) with kernel \(G\)
curve \(\gamma\) determines a covector in \(V^*\):
\(v\mapsto\int_\Omega v(x)^T\gamma(x)dx\)
currents norm is \(\|\gamma\|\) using the RKHS norm on \(V^*\)
discretized: \(l\approx \sum_{i=1}^n\delta_{l(t_i)}^{\dot{l}(t_i)}\) gives
Deformetrica http://www.deformetrica.org/
outer metrics: measure deformations of \(\Omega\)
inner metrics: measure deformations of \(\gamma\) itself
e.g. \(L_\gamma=I_d-D_s\) or higher order
Elastic: \(g^{a,b}(h,k)=\int_{\mathbb{S}^1}a^2|(D_s h)^{\perp}|\:|(D_s k)^{\perp}|+b^2|(D_s h)^{\top}|\:|(D_s k)^{\top}|ds\)
Parametrization invariance:
\(L_{\gamma\circ\phi}h\circ\phi=(L_\gamma h)\circ \phi\) implies metric on \(\mathrm{Emb}(\mathbb{S}^1,\mathbb{R}^2)/\mathrm{Diff}(\mathbb{S}^1)\)
h2metrics: https://github.com/h2metrics/h2metrics
Exercise session:
By Stefan Sommer




