Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, Russ Tedrake


Constrained Bimanual Motion Planning




Images Generated by Microsoft Copilot
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
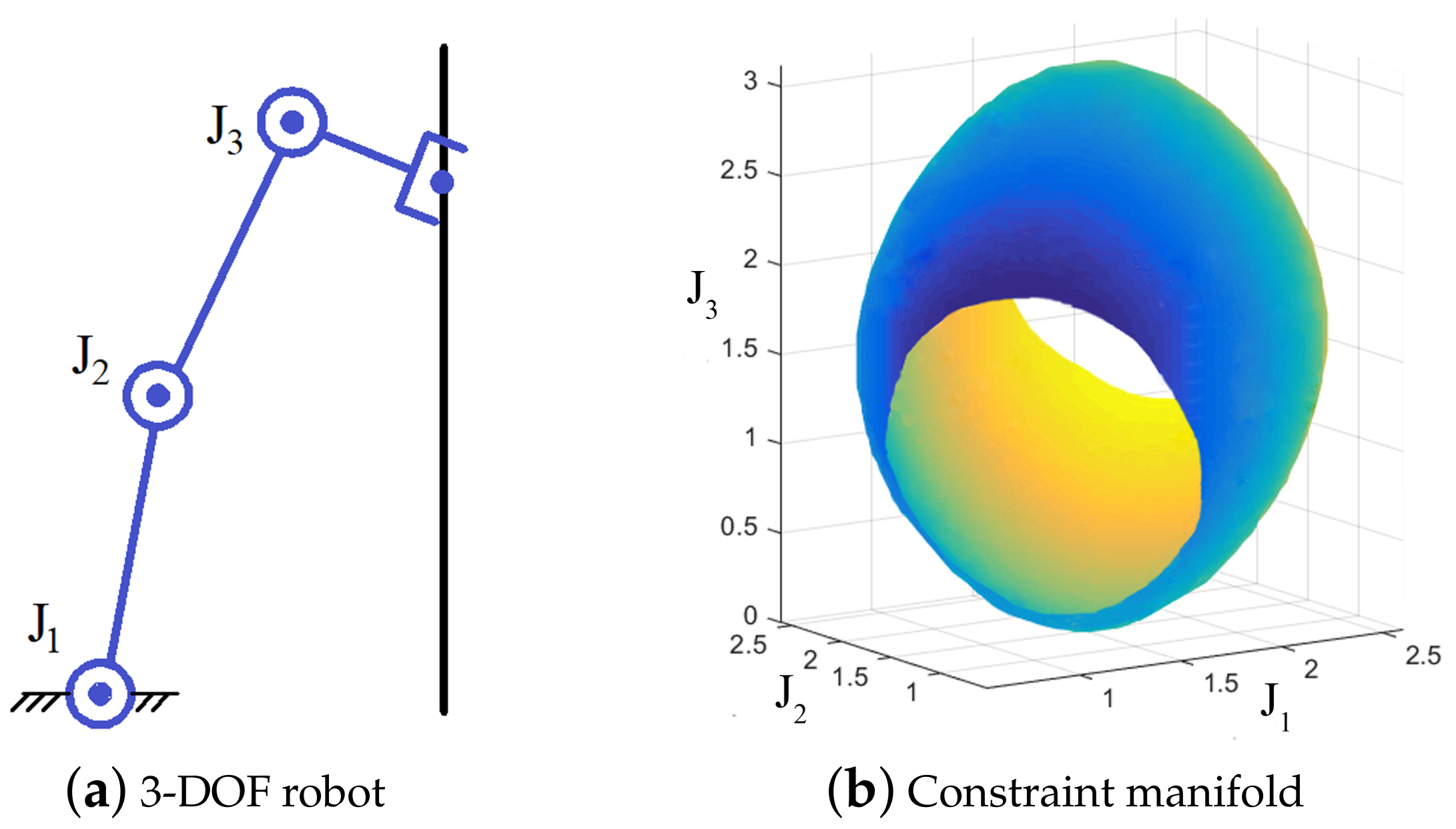
An Illustrative Example
Learning the Metric of Task Constraint Manifolds for Constrained Motion Planning, Zha et. al.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Sampling-Based Planning
Trajectory Optimization
Existing Approaches
Sampling-Based Methods for Motion Planning with Constraints, Kingston et. al.
Direct Collocation Methods for Trajectory
Optimization in Constrained Robotic Systems, Bordabla et. al.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake

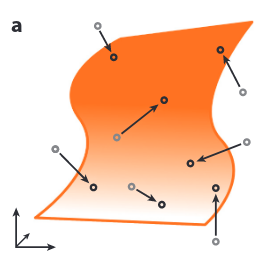
1) Parametrizing the Constrained Configuration Space
2) Planning with the Parametrization
Our Approach (High-Level)
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Kinematics Are Not Arbitrary

Sampling-Based Motion Planning under Kinematic Loop-Closure Constraints, Cortés et. al.

Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments, Chiurazzi et. al.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Analytic IK in General


IKFast
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
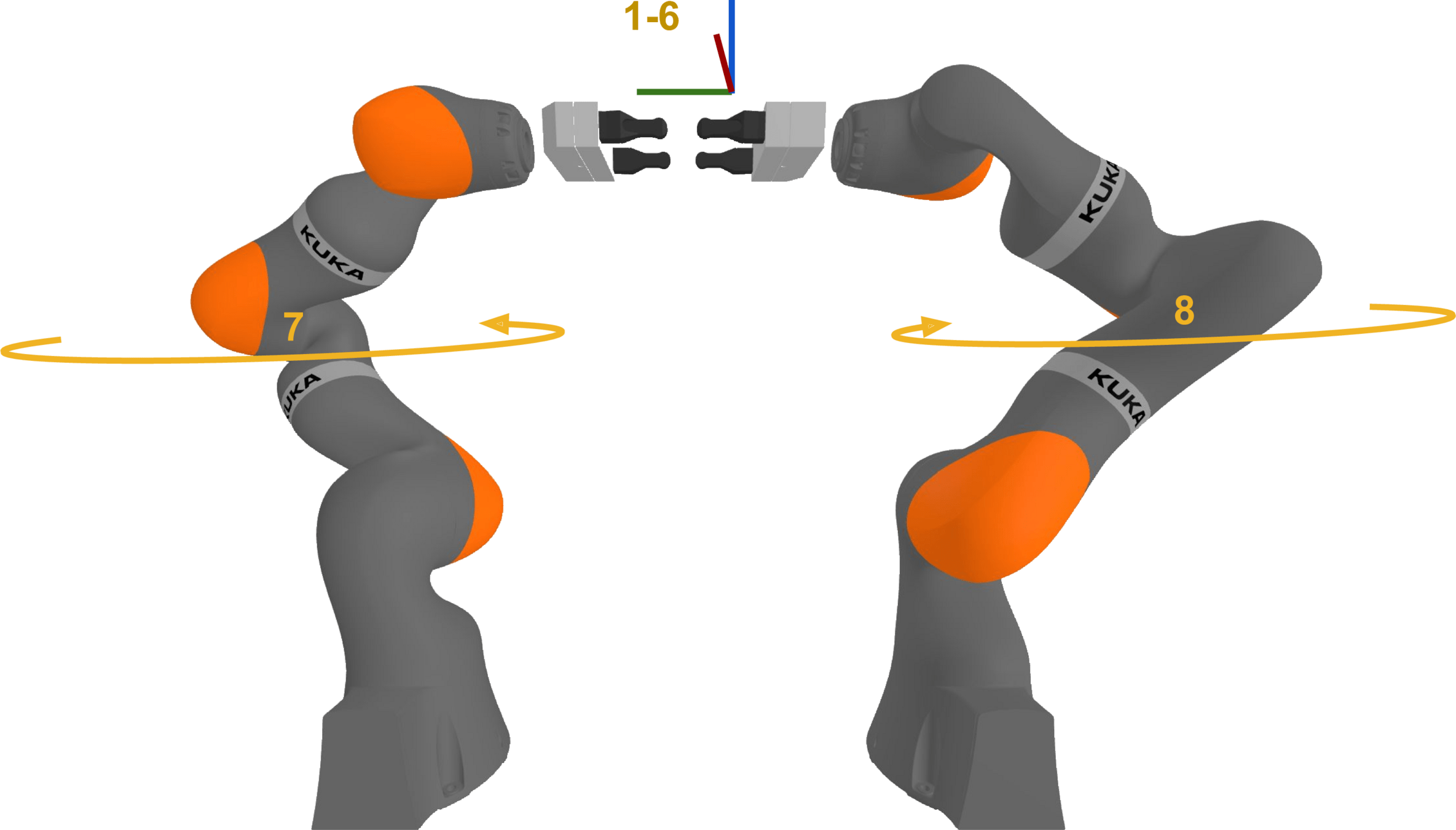
Kinematic Redundancy

Robot Arm Path Planning Using Modified Particle Swarm Optimization based on D* algorithm, Sadiq et. al.

Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Parametrizing the Constraint Manifold
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Parametrizing the Constraint Manifold
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
GCSTrajOpt
Motion Planning around Convex Obstacles with Convex Optimization, Marcucci et. al.


Motion Planning around Convex Obstacles with Convex Optimization, Marcucci et. al.
Graph of Convex Sets Trajectory Optimization
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake

Previous Best Option: Approximations
Global Inverse Kinematics via Mixed-Integer Convex Optimization, Dai et. al.

Path Planning on Manifolds using Randomized Higher-Dimensional Continuation, Porta et. al.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
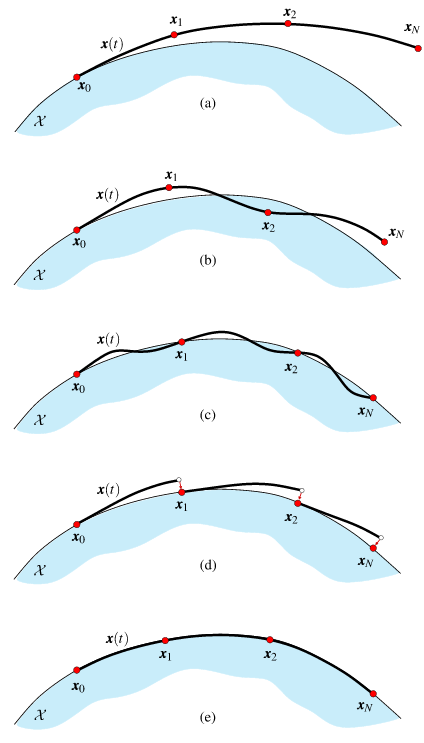
Random Walk around a Region
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
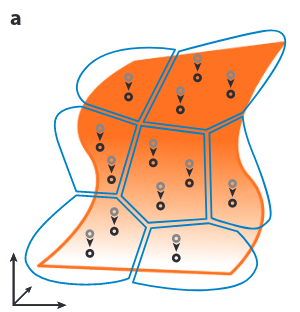
IRIS: Getting Convex Sets

\(\textrm{FK denotes the Forward Kinematics Map}\)
\(\textrm{Configuration Space}\)
\(\textrm{Task Space}\)
Growing Convex Collision-Free Regions in Configuration Space using Nonlinear Programming, Petersen et. al.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained IRIS
- Grow an IRIS region in the parametrized space
- Multiple sources of hyperplanes
- Subordinate arm joint limit violations
- Reachability violations
- Collisions
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained Planning with GCSTrajOpt
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake


Path Lengths in Configuration Space
(Asterisk Denotes Collisions)
Online Planning Time (s)
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
- Can treat the entries of the end-effector transform (e.g. grasp distance) as free variables for IRIS
- Fix the transform at plan time
Varying the Grasp Distance
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained Planning with GCSTrajOpt
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, Russ Tedrake
Future Work
- Open question: can we move beyond planning to, e.g., control and RL
- How to properly handle singularities and changing discrete IK parameters
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Why an Asymmetric Parametrization?

Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Why an Asymmetric Parametrization?
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Balancing the Arms/Shortest Paths in \(\mathbb{R}^{14}\)
(This Paper)
(Future Work)
Constrained Bimanual Planning with Analytic Inverse Kinematics
Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
Balancing the Arms/Shortest Paths in \(\mathbb{R}^{14}\)
(This Paper)
(Future Work)
Bimanual ICRA Talk
By tcohn




