視覺組報告
曾郁翔
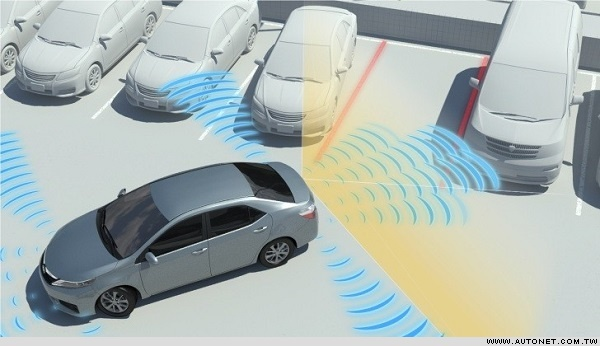
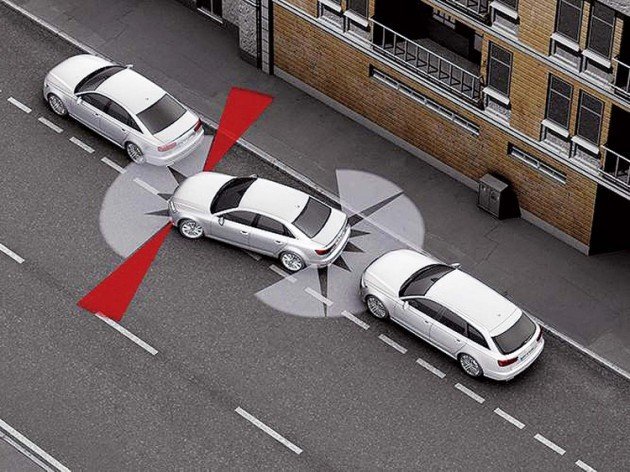
Q1. 現有車廠技術
Q2. 戶外偵測技術
Toyota
Audi
Kinect v2
spec: IR dept camera
打出紅外線並有特殊圖形網格以便偵測。
優點: 適合偵測人體動作
缺點: 戶外感測易受光線影響 (幾乎不可用)
解法: 用RGB camera 做 orb-slam 並搭配深度資料做短距判斷。
Zed Stereo
spec: stereo ( double) camera
硬體很直白,資料量大,吃運算資源。
優點:適合戶外偵測,有api
缺點:使用者少,可參考開發教學少
解法:api 加入 ROS 以 TX1 驅動,實做slam
開發硬體
一些專有名詞
ROS: robotic operating system 給機器人用的開放系統,方便接入各種偵測器與虛實整合
TX1: 圖形開發嵌入板
RGB Camera: 一般可見光相機
Kinect v2
Zed Stereo
+ Nvidia tx1
需求
Title Text
- Sonar ROS https://www.youtube.com/watch?v=IDq3QWnEndc
- Bullet Two
- Bullet Three
視覺組報告
By txshon Tseng



