視覺偵測期中報告
B01502075 曾郁翔
Goal
Done
Todo
Goal
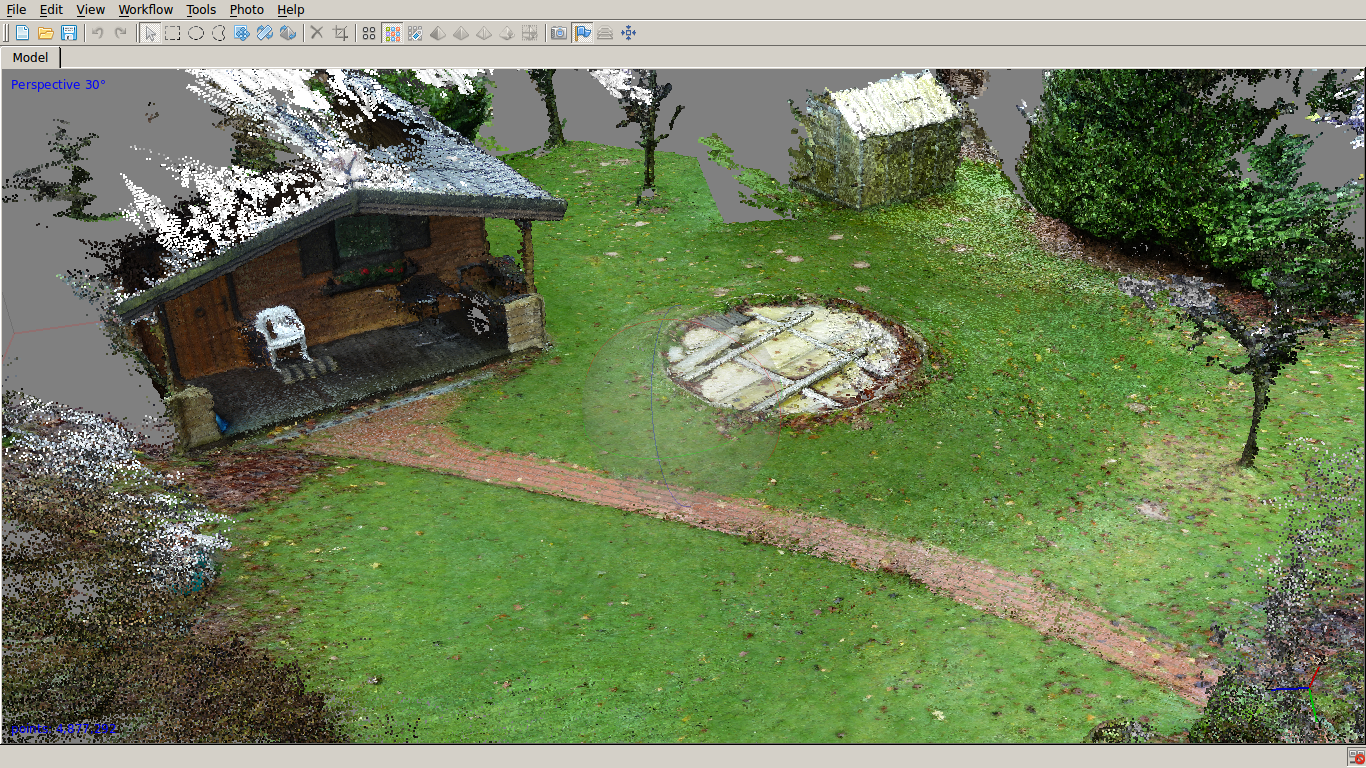
1. Sense surroundings with stereo camera.
2. Navigate in this area
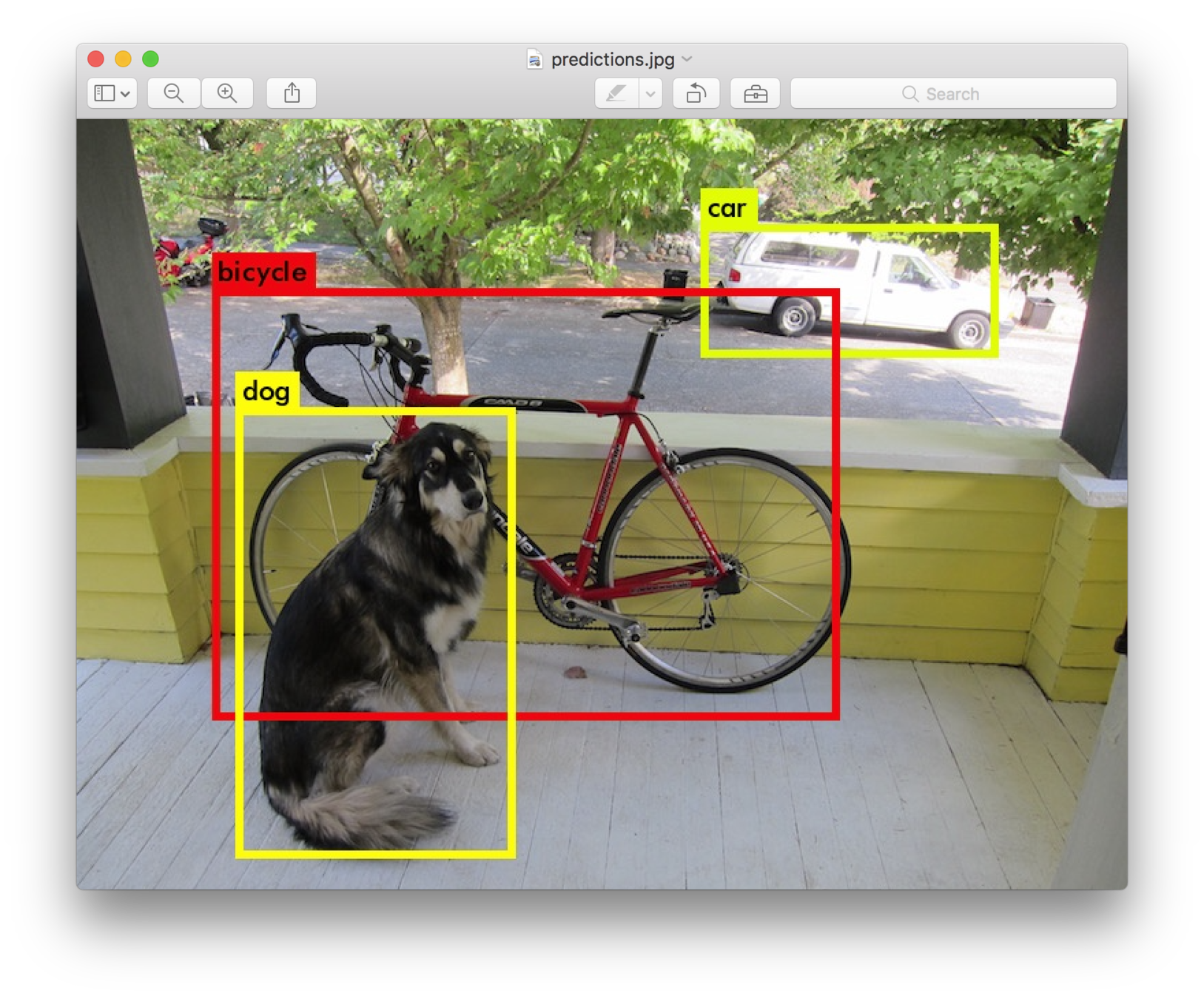
3. Recognize objects
Done
Hardware:
Nvidia TX1, ZED camera
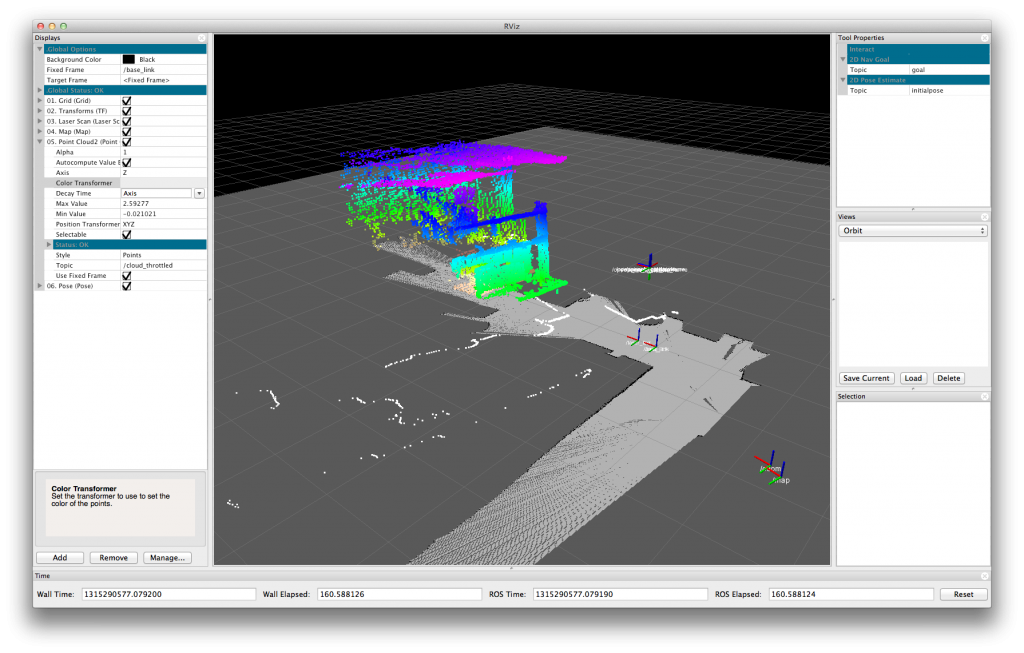
Software: ROS and RViz
Update Ubuntu to 16.04
Combining the ROS with ZED
Findings:
Depth recognition cannot be the only parameter for parking. Floor recognition is required!



Todo
* Build virtual space and simulation control
* Faster SLAM algorithm
* Object recognition
*Point-to-point autonomous navigation
視覺偵測期中報告
By txshon Tseng



