Principles of Sim-and-Real Cotraining For Robot Manipulation
Apr 10, 2025
Adam Wei

Joint work with Abhinav Agarwal, Boyuan Chen, Rohan Bosworth, Nicholas Pfaff, Russ Tedrake
Imitation Learning In Robotics
Figure AI
Toyota Research Institute
Imitation Learning In Robotics
\(\pi_0\)
... but where are the robots in the real world?
Gemini Robotics
Credit: Kevin Black (2024)
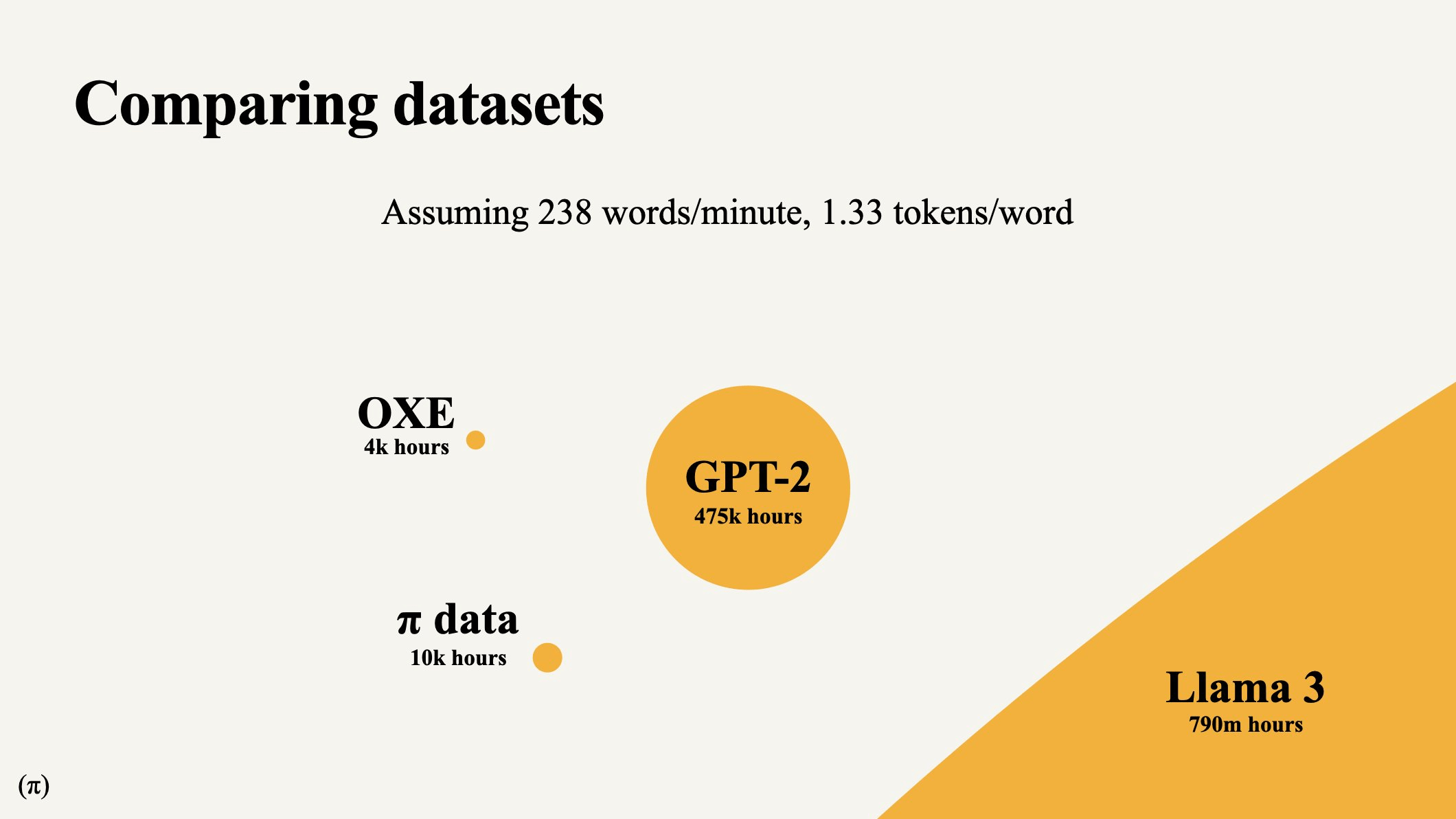
Robot Data Diet

Big data
Big transfer gap
Small data
No transfer gap
Ego-Exo
robot teleop


Open-X
simulation
How can we obtain data for imitation learning?
(ex. sim & real)


Synthetic Data Generation
"Scaling Up, Distilling Down"
"OPTIMUS"
Data Generation
Data Augmentation
Sim Infrastructure
"RoboCasa"
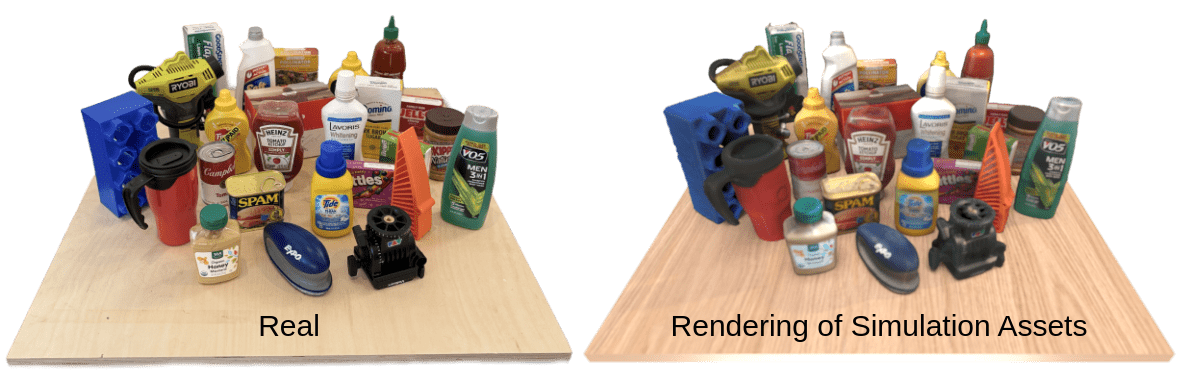
"Scalable Real2Sim..."
"Physics-Driven Data Generation..."
"Physics-Driven Data Generation..."
Sim-and-Real Cotraining
Simulated data has a lot to offer...
... we should understand how to use it.
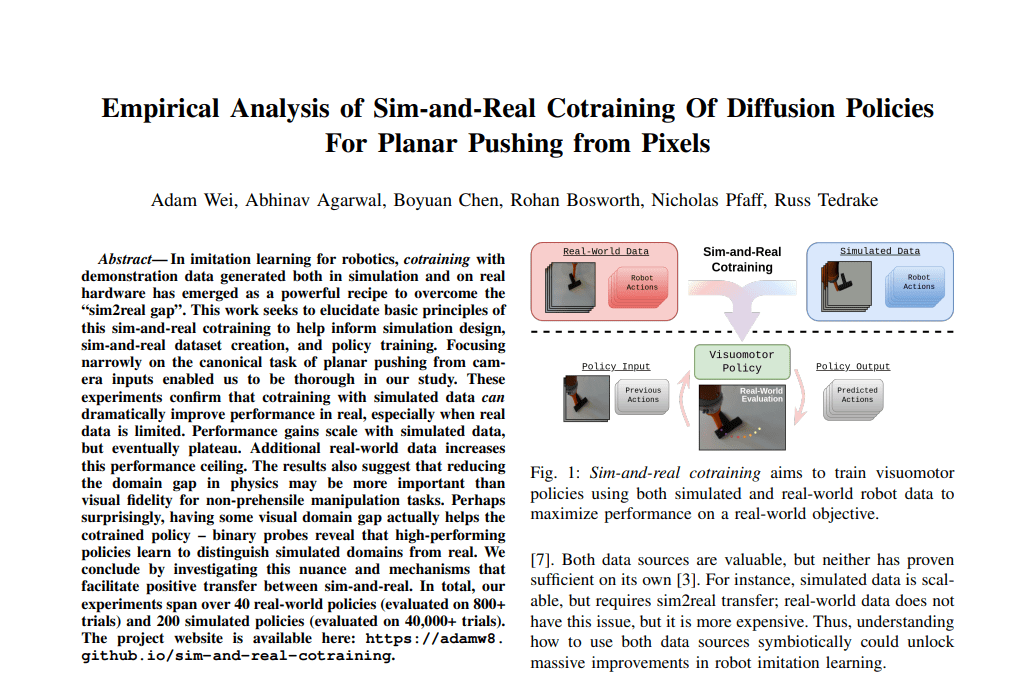
Sim-and-Real Cotraining
\red{\mathcal{D}_{R}\sim p_{R}(O,A)}
\blue{\mathcal{D}_S\sim p_{S}(O,A)}
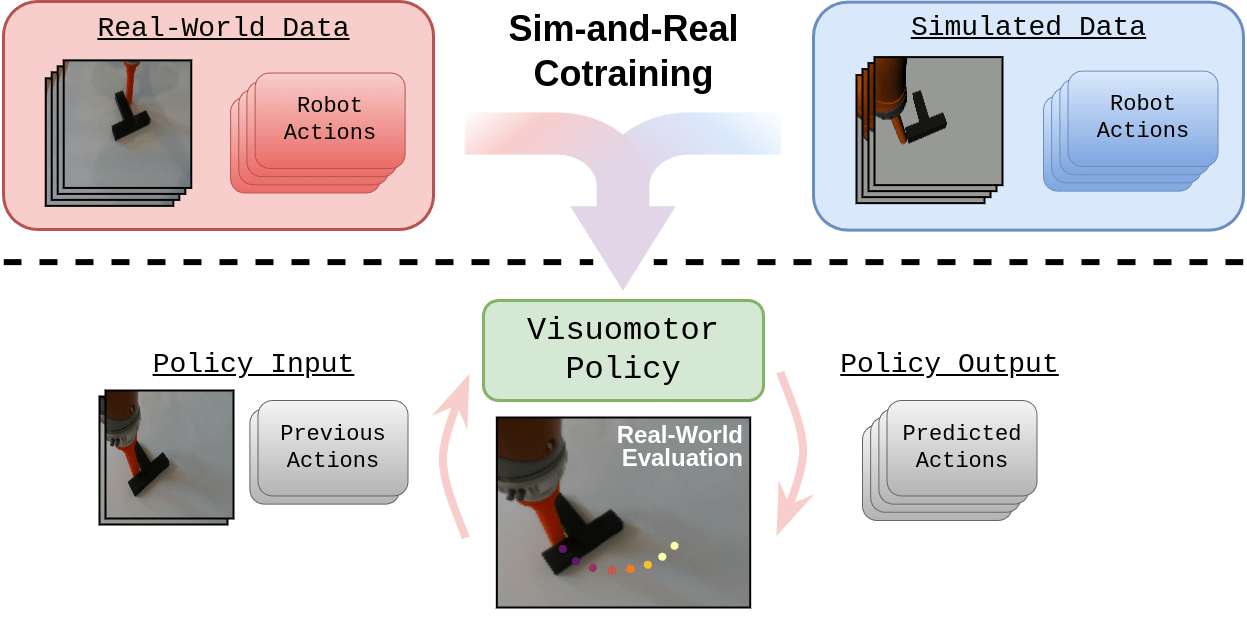
Cotraining: Use both datasets to train a model that maximizes some real-world performance objective
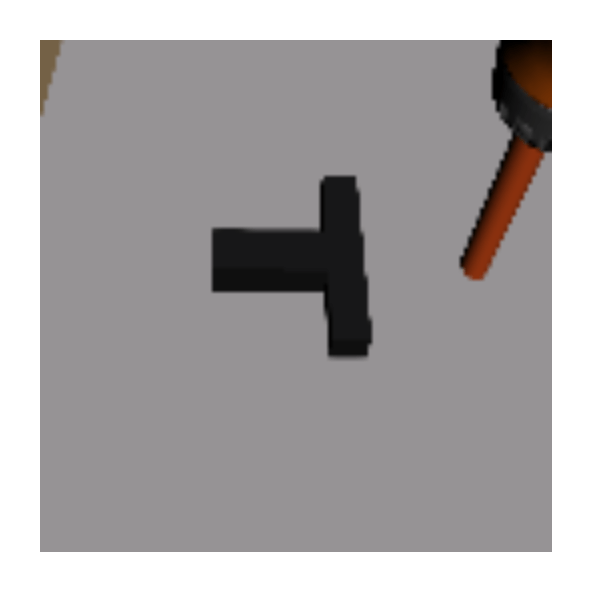
Experimental Setup
Cotraining: Use both datasets to train a model that maximizes some real-world performance objective
Objective:
Success rate on planar pushing from pixels
- Focusing on single task enables controlled experiments and thorough analysis
- more on this later...
Experimental Setup
Cotraining: Use both datasets to train a model that maximizes some real-world performance objective
Datasets:


Model:
Diffusion Policy [2]
\mathcal L_{\mathcal D^\alpha} = \alpha \textcolor{red}{\mathcal L_{\mathcal D_R}} + (1-\alpha) \textcolor{blue}{\mathcal L_{\mathcal D_S}}
[1] Graedsal et. al, "Towards Tight Convex Relaxations For Contact-Rich Manipulation"
[2] Chi et. al "Diffusion Policy: Visuomotor Policy Learning via Action Diffusion"
Real Data
Sim Data
Objective:
Success rate on planar pushing from pixels
Research Questions
1. Does sim-and-real cotraining improve performance?
2. How does performance scale with data? What is the optimal mixing ratio?
3. What qualities matter for synthetic data?
4. What are some underlying mechanisms in cotraining?
Does Cotraining Improve Performance?
50 real demos
50 real demos
2000 sim demos
Success rate: 10/20
Success rate: 18/20
1.8x improvement!


Does Cotraining Improve Performance?
10 real demos
10 real demos
2000 sim demos
Success rate: 2/20
Success rate: 14/20
7x improvement!
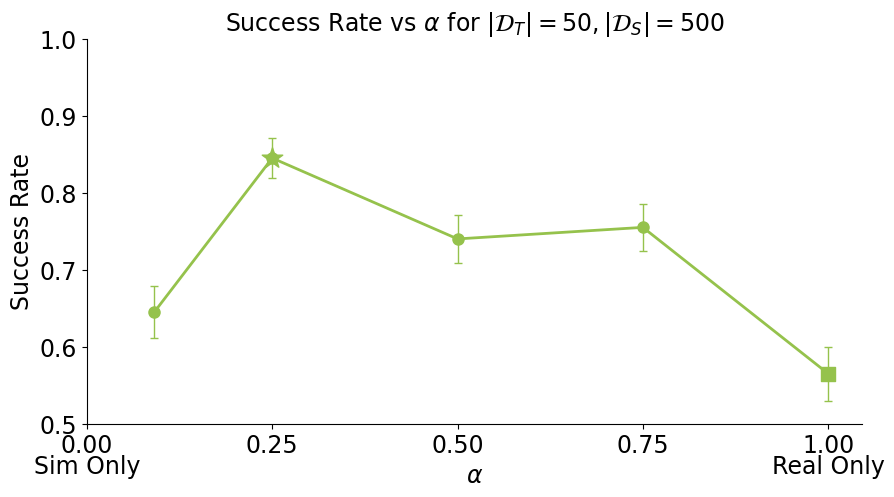
Real World Cotraining Results
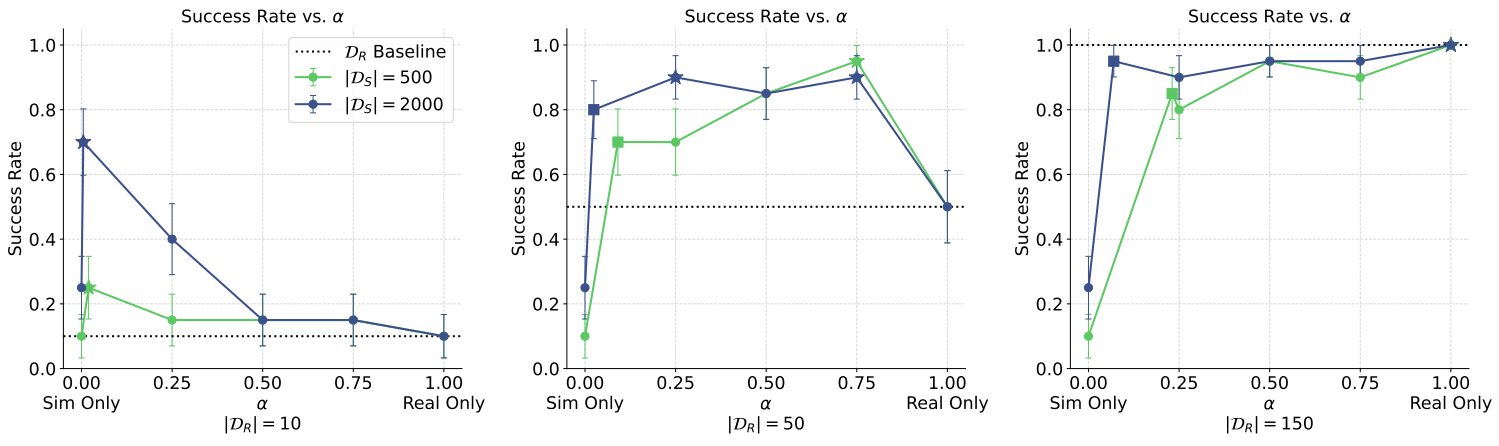
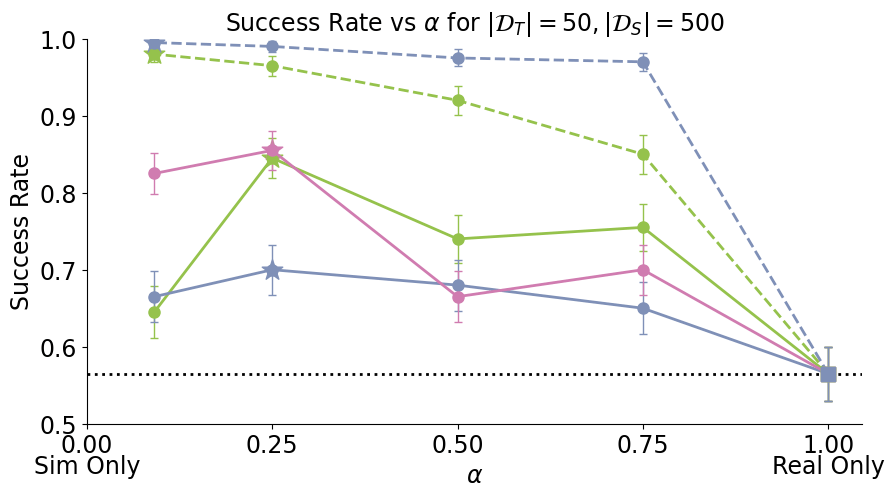
- Cotraining improves policy performance by up to 2-7x
- Scaling sim data improves performance and reduces sensitivity to \(\alpha\)
- What happens when we continue scaling sim data?
\mathcal L_{\mathcal D^\alpha} = \alpha \textcolor{red}{\mathcal L_{\mathcal D_R}} + (1-\alpha) \textcolor{blue}{\mathcal L_{\mathcal D_S}}
Research Questions
1. Does sim-and-real cotraining improve performance?
2. How does performance scale with data? How does \(\alpha\) affect performance?
3. What qualities matter for synthetic data?
4. What are some underlying mechanisms in cotraining?
Bottleneck: Real World Eval
Real-world eval is time-consuming and high variance:
- 20 trials per policy (½-1hr) \(\implies\)large error bars
Investigating scaling with real-world eval is time consuming & expensive
- ... especially a PhD student
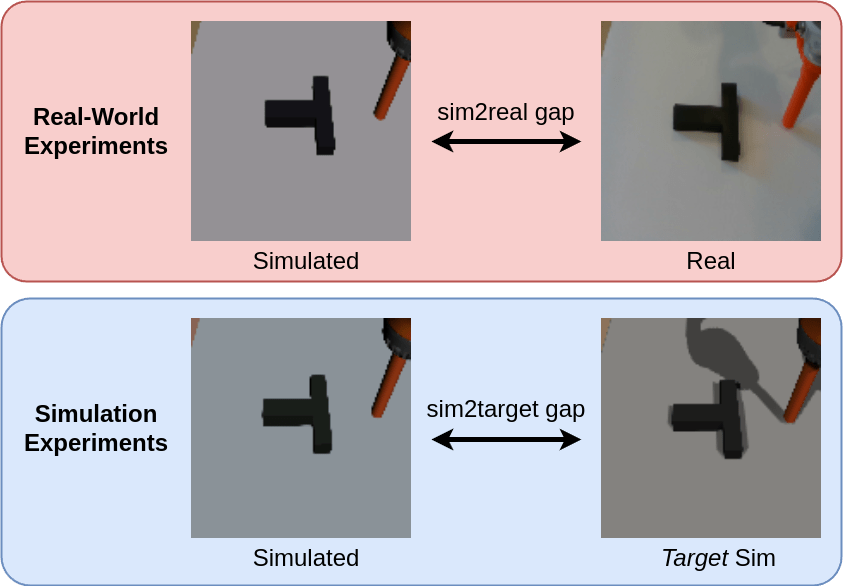
Sim-Sim Cotraining
sim2real \(\approx\) sim2target
Design target sim to emulate
- physics gap
- visual gap
- action gap
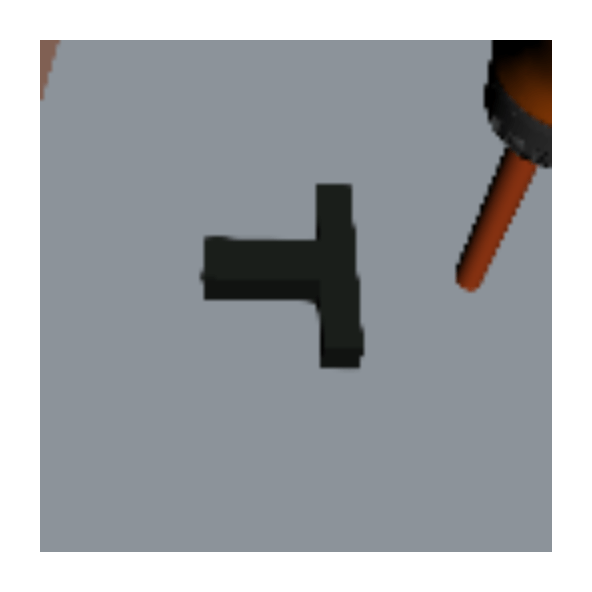
Ex: Visual gap
Sim Demo
Target Sim Demo
Sim-Sim Cotraining
Key idea: Analyze data scaling for cotraining entirely in sim
- Automated, controlled, & high-confidence evaluations
- Explicit control over the sim2target gap
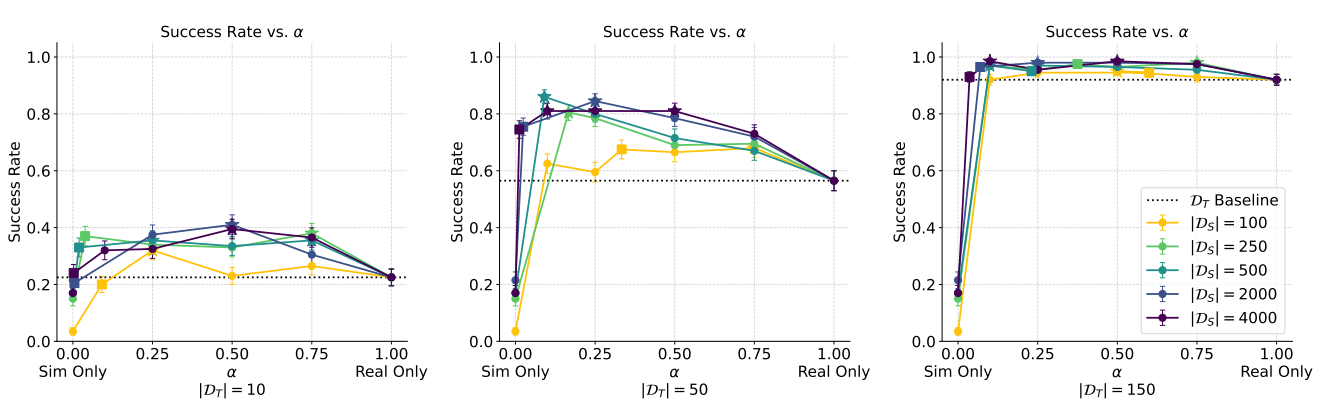
Scaling Sim Data
- Performance gains from scaling sim data plateau; additional real data raises the performance ceiling
- Sim is valuable! But cannot fully replace real data
Research Questions
1. Does sim-and-real cotraining improve performance?
2. How does performance scale with data? How does \(\alpha\) affect performance?
3. What qualities matter for synthetic data?
4. What are some underlying mechanisms in cotraining?
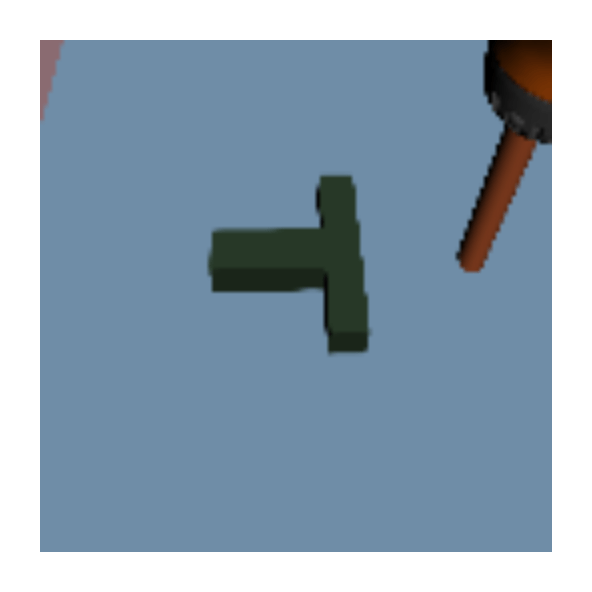
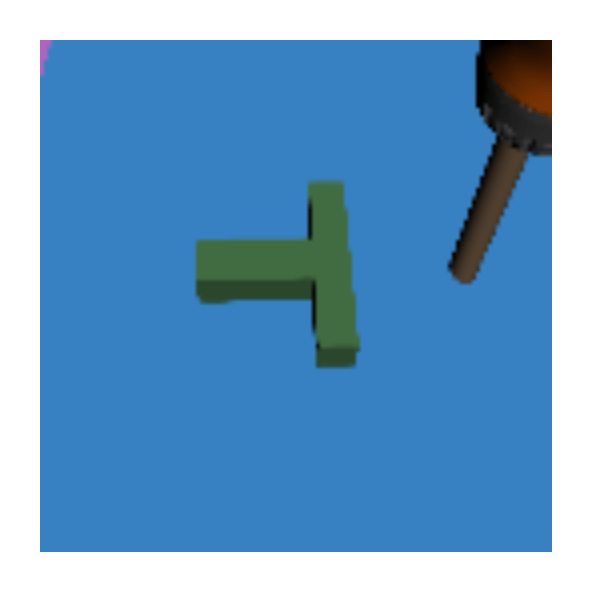
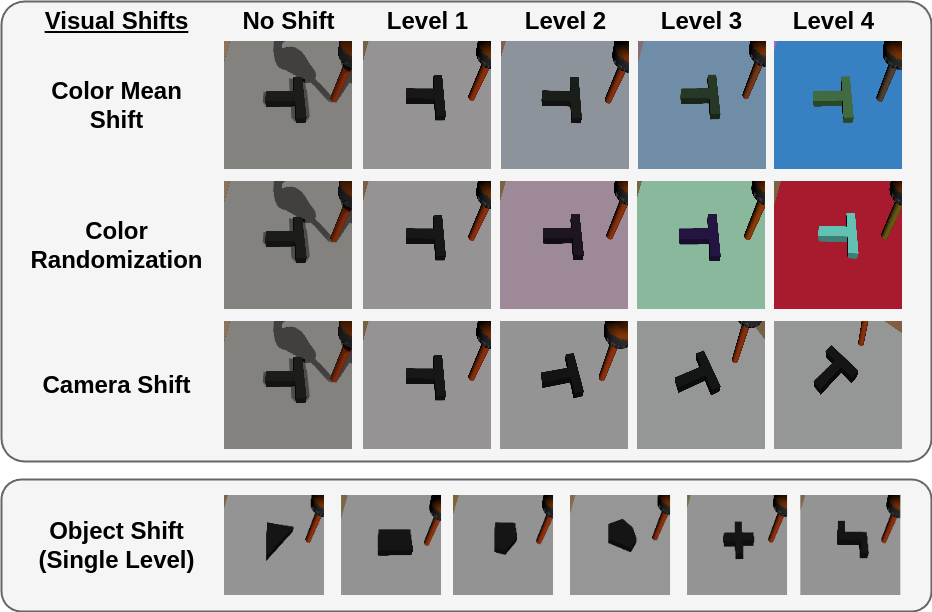
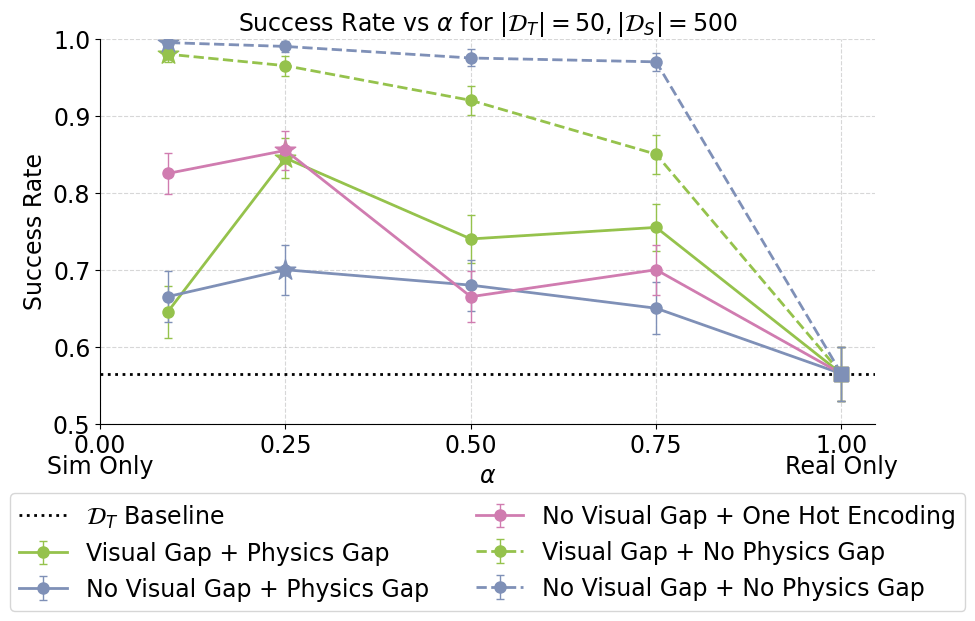
Distribution Shift Experiments
Should I be investing in my physics engine or my renderer?
Increasing color shift
Target Color

How do different sim2real gaps affect cotraining?
Example: Analyzing color shift
Experiment: Vary color shift and analyze the downstream policies
Distribution Shift Experiments
We investigate 6 sim2real gaps:
- Visual shifts: color shift, color randomization, camera shift
- Physical shifts: center of mass shift
- Task shifts: goal shifts, object shifts
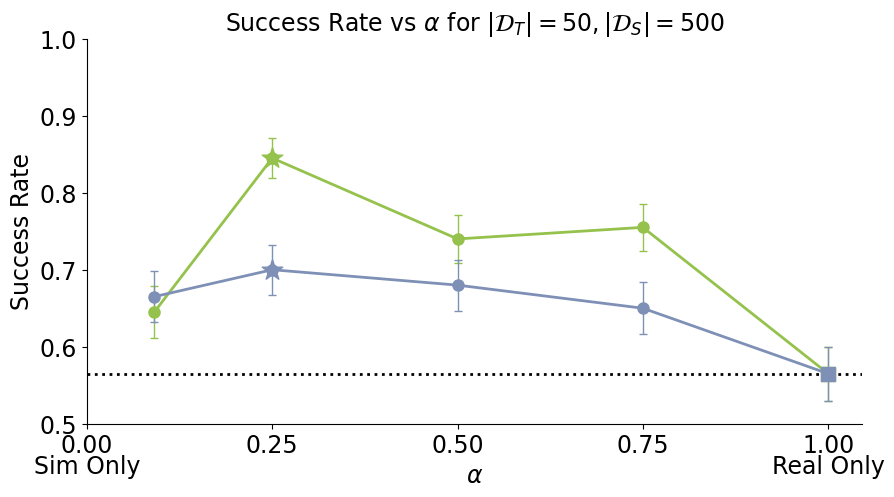
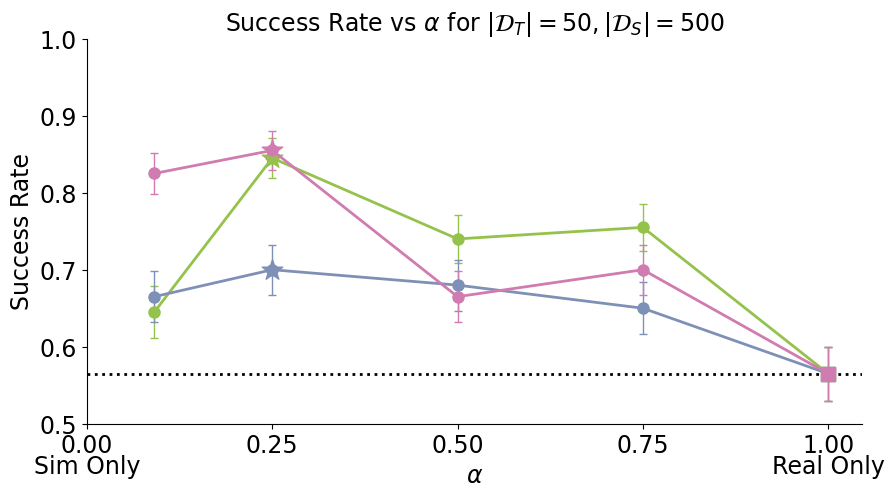
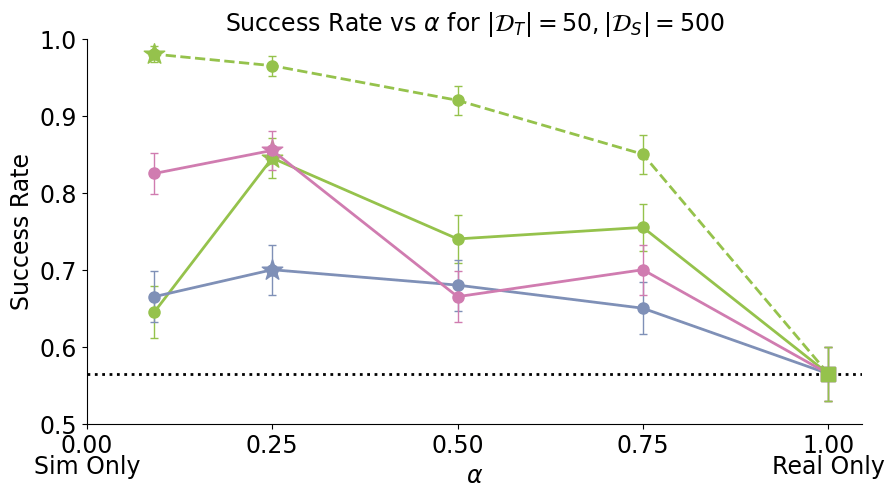
Key Findings
- All shifts reduce performance; physics and task shift are most impactful
- Paradoxically, some visual shift is required for good performance!
(for planar pushing...)
Research Questions
1. Does sim-and-real cotraining improve performance?
2. How does performance scale with data? How does \(\alpha\) affect performance?
3. What qualities matter for synthetic data?
4. What are some underlying mechanisms in cotraining?
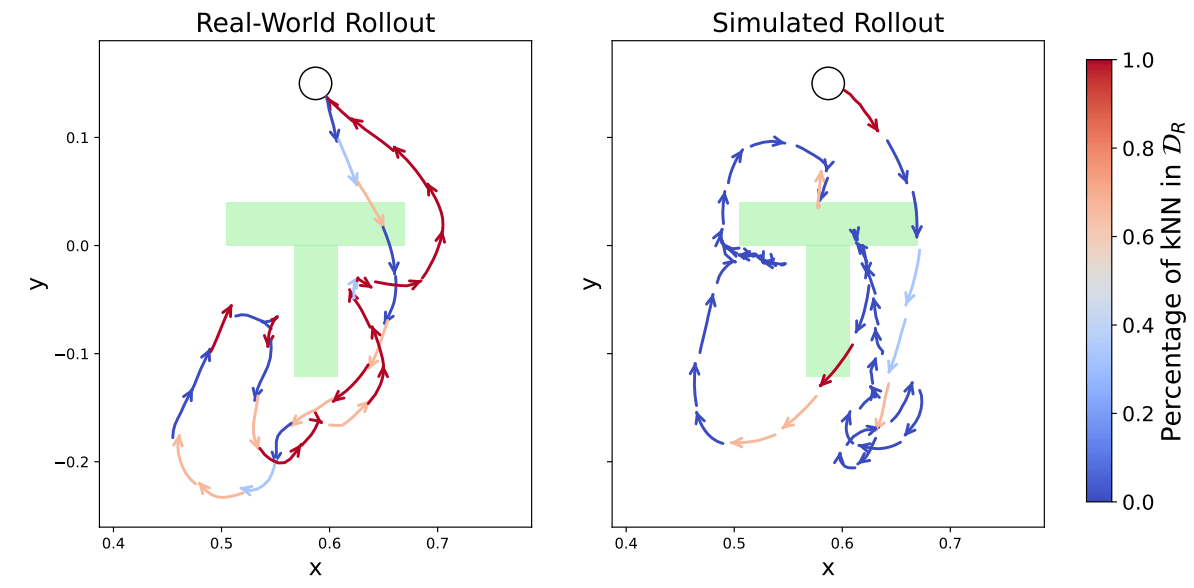
SDE Interpretation
Sim-and-Real Discernability
Real-World Demo
Cotrained Policy (50 real, 2000 sim)
Simulated Demo
- Fix orientation, then translation
- Sticking & sliding contacts
- Similar to real-world demo
- Fix orientation and translation simultaneously
- Sticking contacts only
2x
2x
2x
SDE Interpretation
Sim-and-Real Discernability
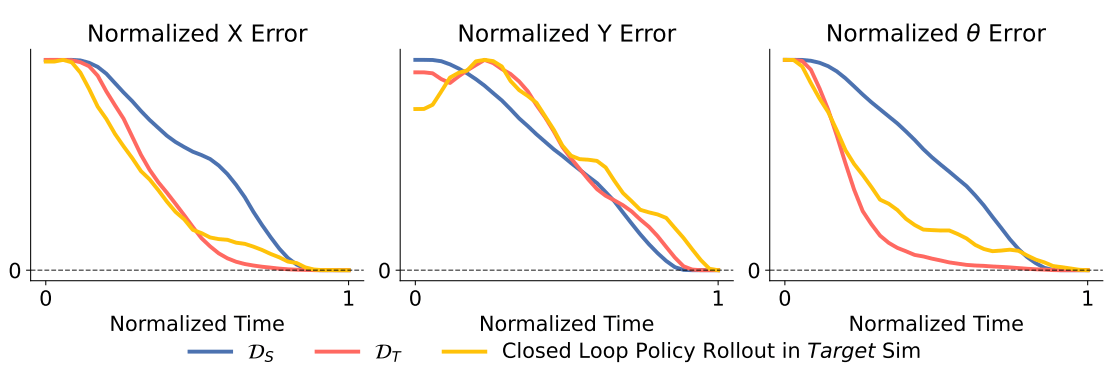
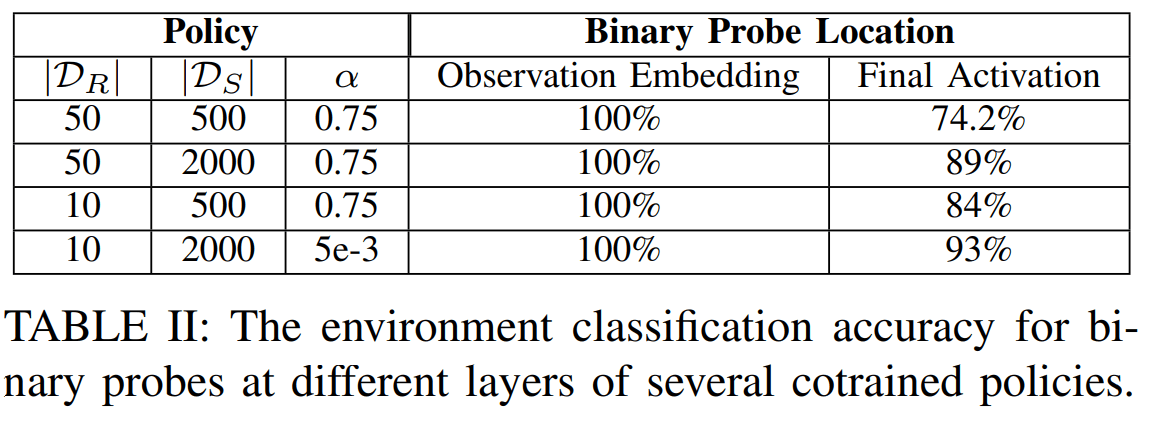
\(\implies\) policies can distinguish sim & real
\(\implies\) policies behave differently in sim & real
High-performing policies must learn to identify sim vs real
since the physics of each environment requires different actions
SDE Interpretation
Sim-and-Real Discernability
High-performing policies must learn to identify sim vs real
since the physics of each environment requires different actions
SDE Interpretation
Positive Transfer: Data Coverage
Real data: high-level strategies and low-level control
Sim data: Fill in missing gaps from the real data, prevents overfitting, provides stronger action priors
SDE Interpretation
[old slide] Positive Transfer: Data Coverage
Real data: high-level strategies and low-level control
Sim data: Fill in missing gaps from the real data, prevents overfitting, provides stronger action priors
SDE Interpretation
Positive Transfer: Power Law
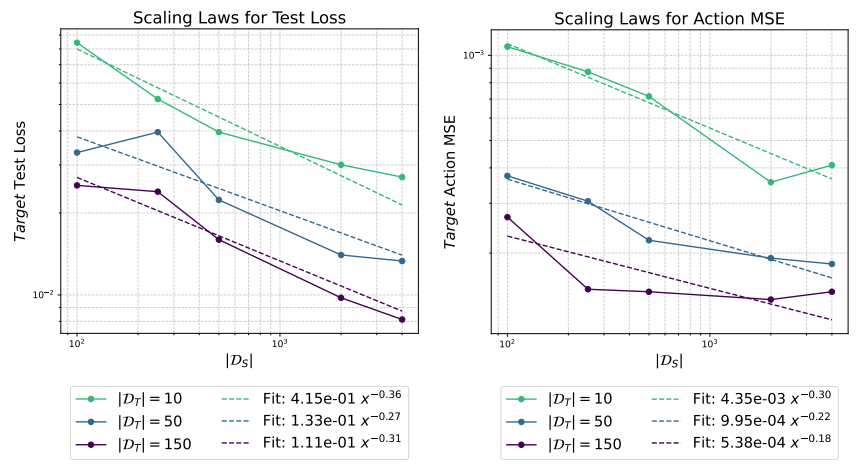

\(\implies\)
Sim demo worth ~0.49-0.83 real demos
Scaling sim reduces test loss & MSE in real!
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Are results limited to single-task?
Zhenyu Jiang
- Concurrent & independent work shows similar results!
- Strong signal that our analysis extends to the multi-task setting
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
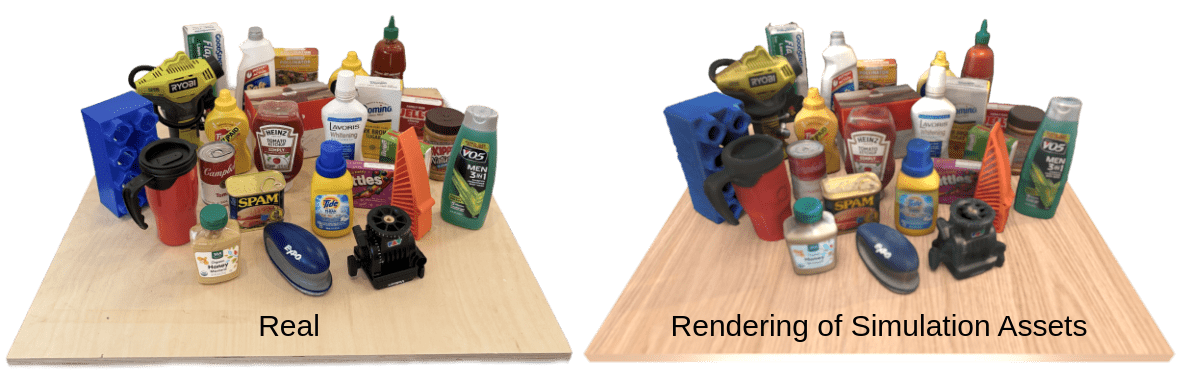
Scalable Real2Sim
How can we scalably obtain simulation assets?
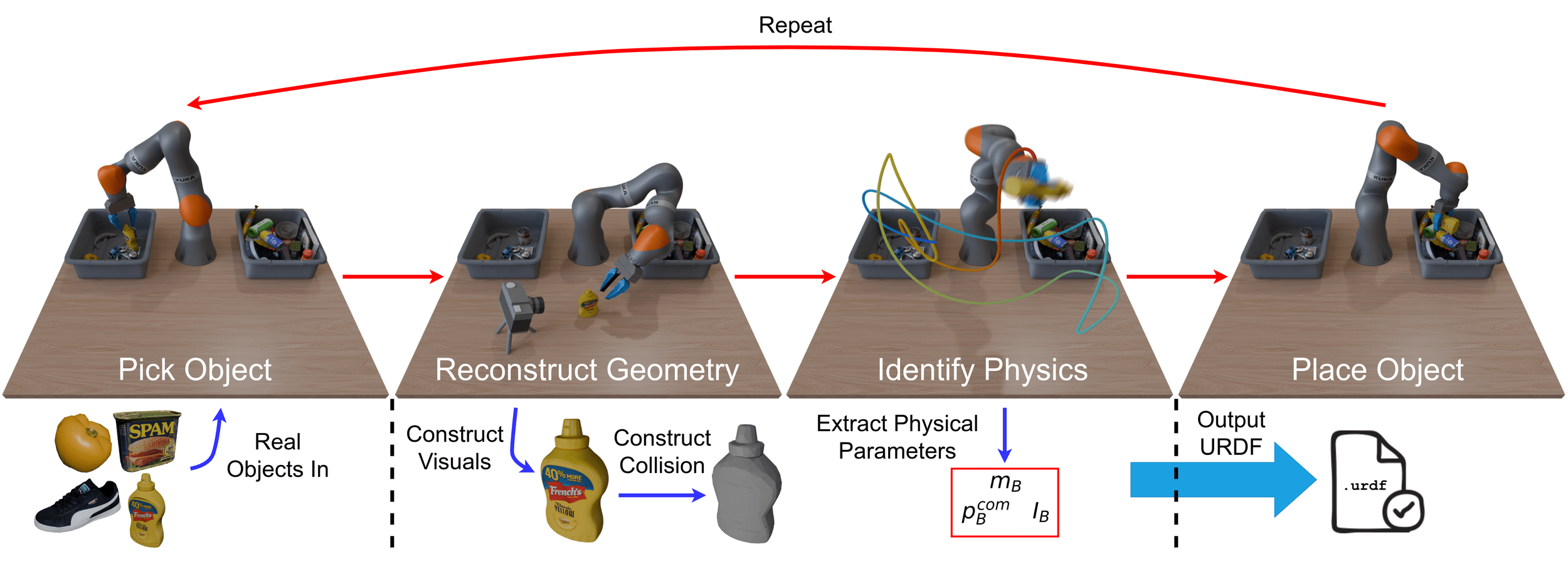


Nicholas Pfaff
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Scalable Real2Sim
How can we scalably obtain simulation assets?
Nicholas Pfaff
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Scalable Real2Sim
How can we scalably obtain simulation assets?
Nicholas Pfaff
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Physics-Driven Data Generation
Lujie Yang
How can we generate contact-rich & cross-embodied robot data?
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Physics-Driven Data Generation
Lujie Yang
How can we generate contact-rich & cross-embodied robot data?
SDE Interpretation
Positive Transfer: Power Laws
SDE Interpretation
Future Directions
I believe that simulation will play a major role in the future of robot foundation models
- New algorithms inspired by our analysis
- Cotraining from non-robot data
- Understanding cotraining...
Thank You!
Lujie Yang
Nicholas Pfaff
Scalable Real2sim
Physics-Driven Data Generation
Amazon CoRo Symposium 2025
By weiadam
Amazon CoRo Symposium 2025
Slides for my talk at the Amazon CoRo Symposium 2025. For more details, please see the paper: https://arxiv.org/abs/2503.22634


