Privacy Attacks in Robotics
Nov 14, 2025
Adam Wei
Privacy in Robotics

Privacy Concerns (as the consumer...)
Data Protection
Data Misuse
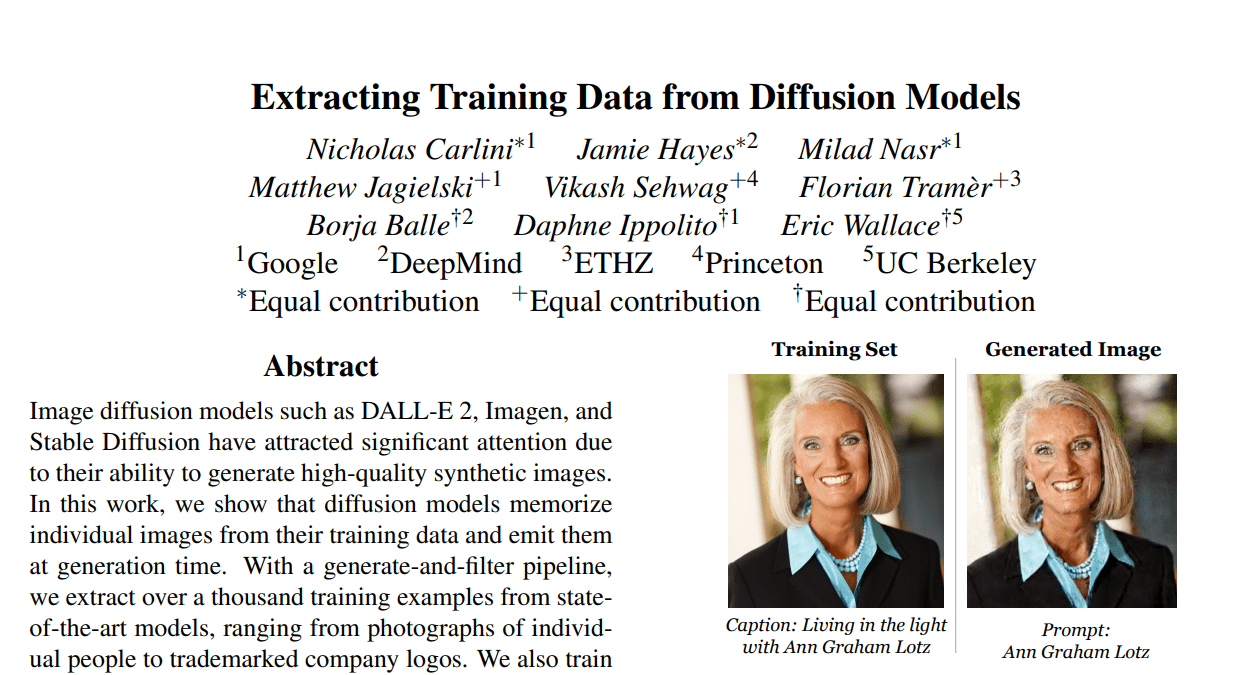
Data Extraction
data!
Privacy Concerns
1. Are privacy attacks on robot models possible?
2. How can we defend against these attacks?
Easier direction
Harder direction
- Proof by example
- Empirics often insufficient
- Need to clearly state assumptions for proofs, etc
- People are clever ;)
Agenda
- Anatomy of a privacy attack
- Deep Leakage from Gradients
- Generative Model Inversion
- Robotics
Part 1
Anatomy of a Privacy Attack
Threat Model: Information Access
Black box: Access to
- the model API
White box: Access to
- model architecture
- model parameters
- previous checkpoints
- training gradients
more access
\(\implies\)strong attacks
Threat Model: Information Access
Black box: Access to
- the model API
White box: Access to
- model architecture
- model parameters
- previous checkpoints
- training gradients
more access
\(\implies\)strong attacks
Robotics?
Threat Model: Type of Attacks
Membership
Was the model trained on a specific datapoint?
Reconstruction
Can I reconstruct the training dataset?
Property
Given a partial datapoint, can I infer other properties?
Model Extraction
Can I extract the model parameters, etc?
Threat Model: Type of Attacks
Membership
Was the model trained on a specific datapoint?
Reconstruction
Can I reconstruct the training dataset?
Property
Given a partial datapoint, can I infer other properties?
Model Extraction
Can I extract the model parameters, etc?
Reconstruction Attacks
Black box: Access to
- the model API
White box: Access to
- model architecture
- model parameters
- previous checkpoints
- training gradients
Deep Leakage from Gradients
Generative Model Inversion
Part 2
Deep Leakage from Gradients (DLG)
Federated Learning

Central Server
\(W_t\)
\(W_t\)
\(\nabla_{W_t} \mathcal{L}_{1}\)
\(\nabla_{W_t} \mathcal{L}_{2}\)
\(W_{t+1} = W_t -\frac{\eta}{N}\sum_i\nabla_{W_t} \mathcal L_i\)
Deep Leakage from Gradients
Goal: reconstruct datapoints that would produce the same gradient

Deep Leakage from Gradients
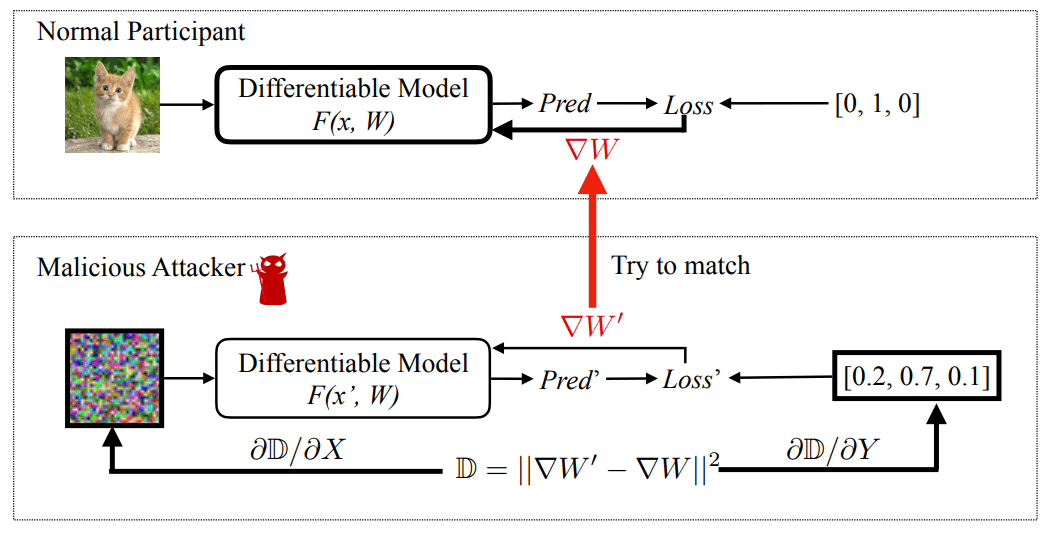
Deep Leakage from Gradients
Algorithm: given \(W\), \(\nabla W\), \(f_W\):
Initialize \((x',y')\sim \mathcal N(0,I)\)
Repeat until convergence:
\((x', y') \leftarrow (x', y') - \eta \nabla_{(x', y')} D\)
Solve with L-BFGS
(avoids Hessian computation)
\(D = \lVert \nabla W' - \nabla W \rVert_2^2\)
\(\nabla W' = \nabla_W \mathcal L(f_W(x'), y')\)
Variations of DLG
iDLG: Exploit classification structure to find ground truth labels
Many other variants...
\begin{aligned}
(x'^*, y'^*) = \argmin_{(x', y')} &\ \mathrm{dist}(\nabla W', \nabla W) + \mathrm{regularization}\\
s.t.& \quad\mathrm{constraints}\\
& \quad \mathrm{prior\ knowledge}
\end{aligned}
ex. optimize \(z\) instead of \(x'\), where \(x' = G(z)\)
Results & Defense
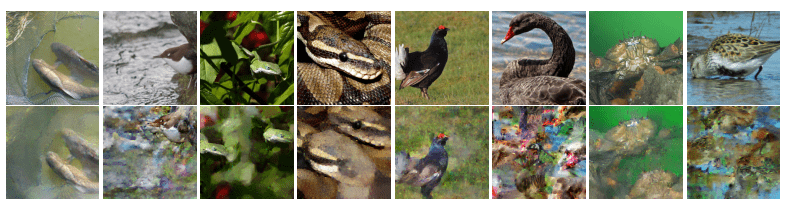
Defense: Adding zero-mean noise to gradients
- Gradients remain unbiased \(\implies\) still contribute to training, but much harder to reconstruct
Part 3
Generative Model Inversion
Assumptions
- Access to the weights of a model that maps inputs to labels
- Prior knowledge of the input distribution
- Known labels; the goal is to recover the inputs
Method
1. Train a WGAN (with some extra tricks...)
- Discriminator (D): predicts probability that image is real
- Generator (G): generates images from latents x
2. Let \(C(x)\) be the likelihood of the desired output given \(x\)
3. Solve
\hat z = \argmax_z D(G(z)) + \lambda \log(C(G(z)))
Realism
Likelihood of target output
4. \(\hat x = G(\hat z)\)
Results
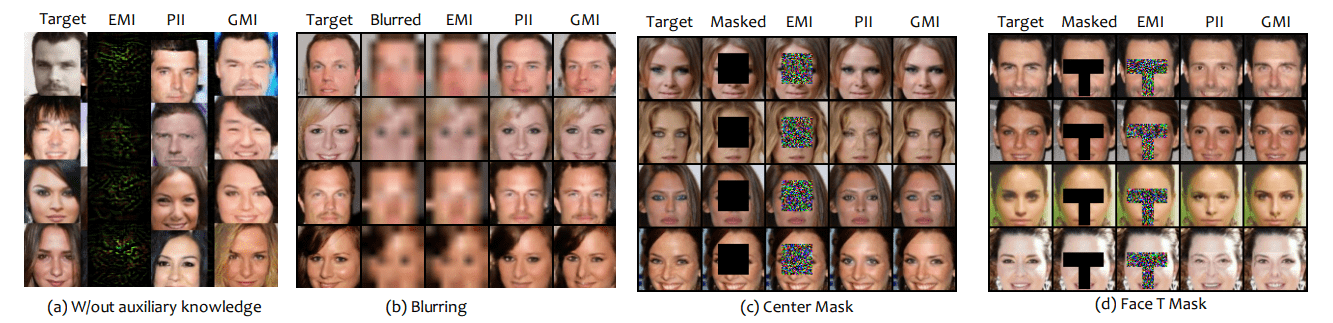
Model Inversion Attacks
\begin{aligned}
x^* = \argmax_{x} &\ \log p_f(y|x) + \lambda \log p_\mathrm{priori}(x)\\
\mathrm{s.t.}& \quad\mathrm{constraints}\\
& \quad \mathrm{prior\ knowledge}
\end{aligned}
- Solved with zeroth or first-order methods
- Brittle!
- Improves with generative modeling (ex. flows)
Part 4
Robotics & Generative Modeling
Attacks in Generative Modeling
Conditioning variables are known;
outputs are sensitive
Robotics
(subset) of conditioning variables are sensitive!
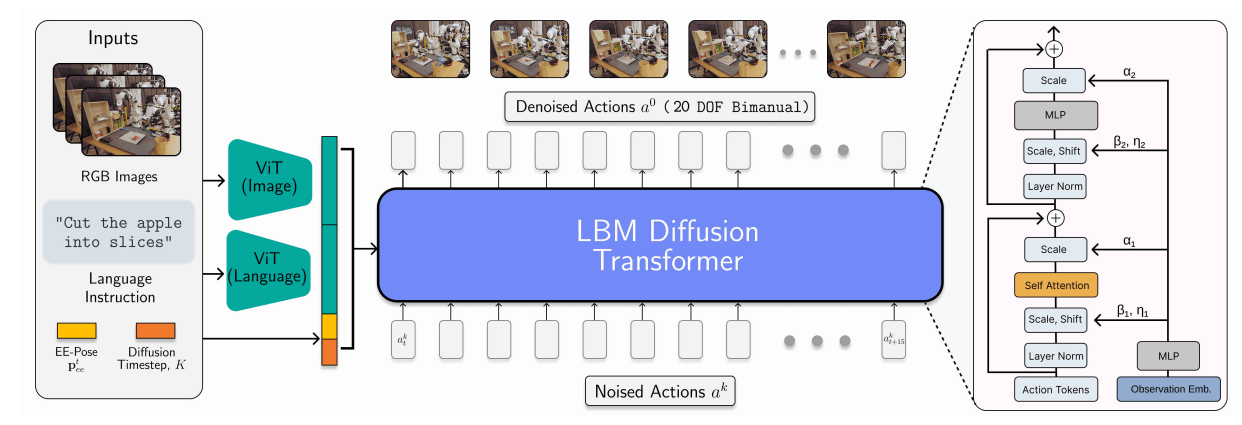
Outputs (may be) known;
Robotics
Approaches
- Try existing attacks
- Develop new attacks that leverage the structure in robotics
Thank You!

Thank You!


Privacy In Robotics
By weiadam



