Empirical Analysis of Sim-and-Real Cotraining Of Diffusion Policies For Planar Pushing from Pixels
IROS 2025
Adam Wei, Abhinav Agarwal, Boyuan Chen, Rohan Bosworth, Nicholas Pfaff, Russ Tedrake
Sim-and-Real Cotraining
Cotrain from both simulated and real-world robot data to maximize a real-world performance objective
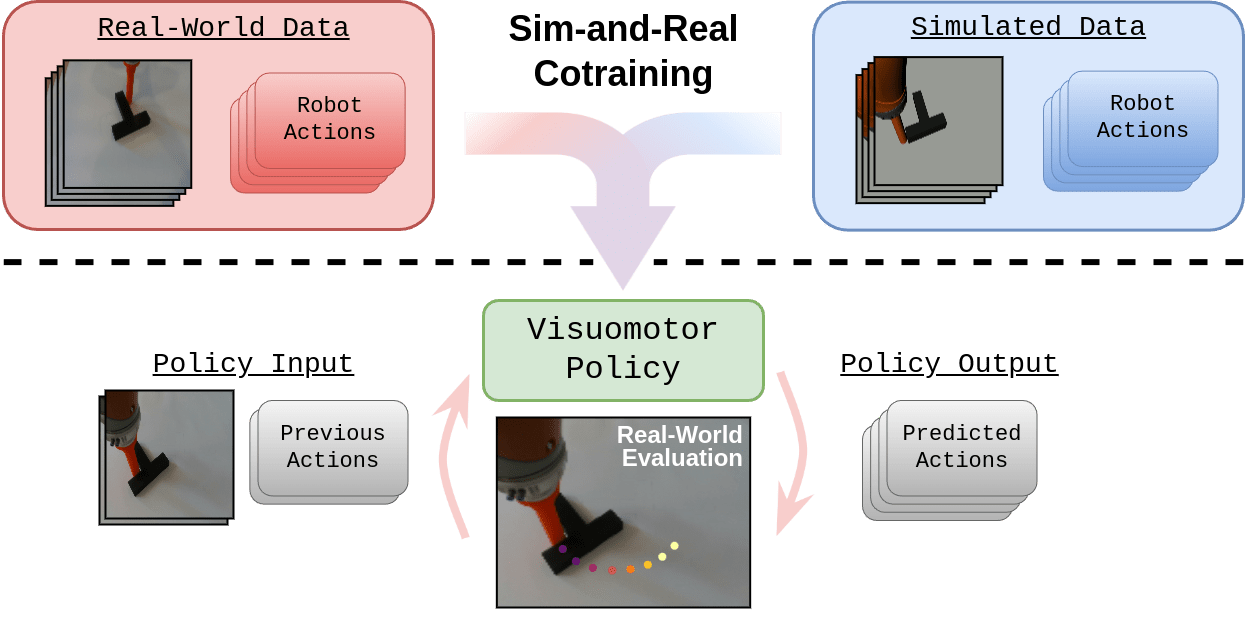
Planar Pushing From Pixels
50 real demos
50 real demos
2000 sim demos
Success rate: 10/20
Success rate: 19/20
2x
2x
Experimental Setup
Policy:

Performance Objective:
Success rate on a planar pushing task
Diffusion Policy [2]

[2] Chi et. al "Diffusion Policy: Visuomotor Policy Learning via Action Diffusion"
\mathcal L_{\mathcal D^\alpha} = \alpha \textcolor{red}{\mathcal L_{\mathcal D_R}} + (1-\alpha) \textcolor{blue}{\mathcal L_{\mathcal D_S}}
[1] Graedsal et. al, "Towards Tight Convex Relaxations For Contact-Rich Manipulation"
Data Scale and Data Mixtures
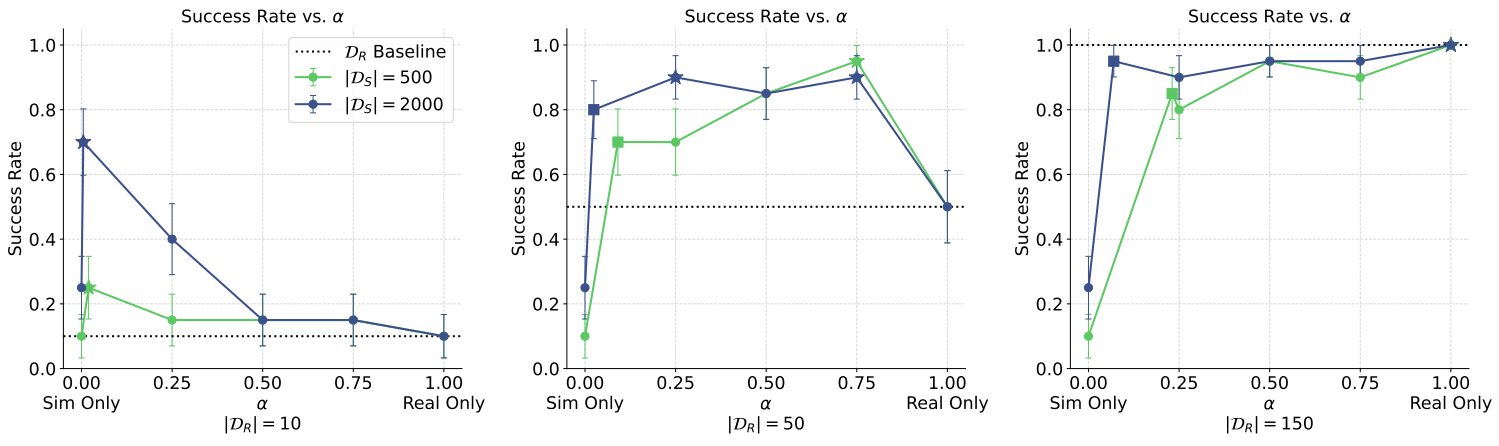
- Cotraining improves policy performance by up to 2-7x
- Scaling sim data improves performance and reduces sensitivity to \(\alpha\)
Low Real Data Regime
Med Real Data Regime
High Real Data Regime
Data Scale and Data Mixtures
- Performance gains from scaling sim data plateau; additional real data raises the performance ceiling
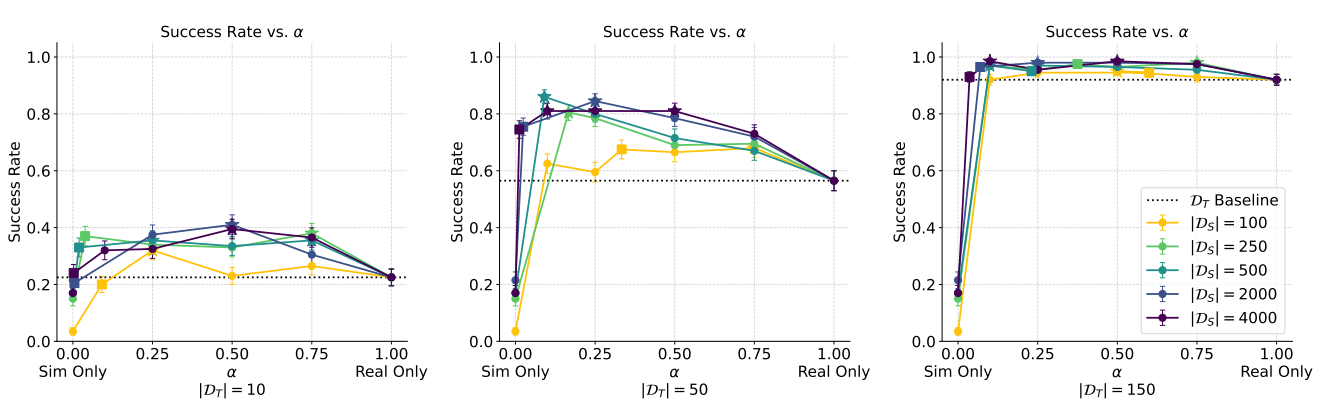
Low Real Data Regime
Med Real Data Regime
High Real Data Regime
Distribution Shifts
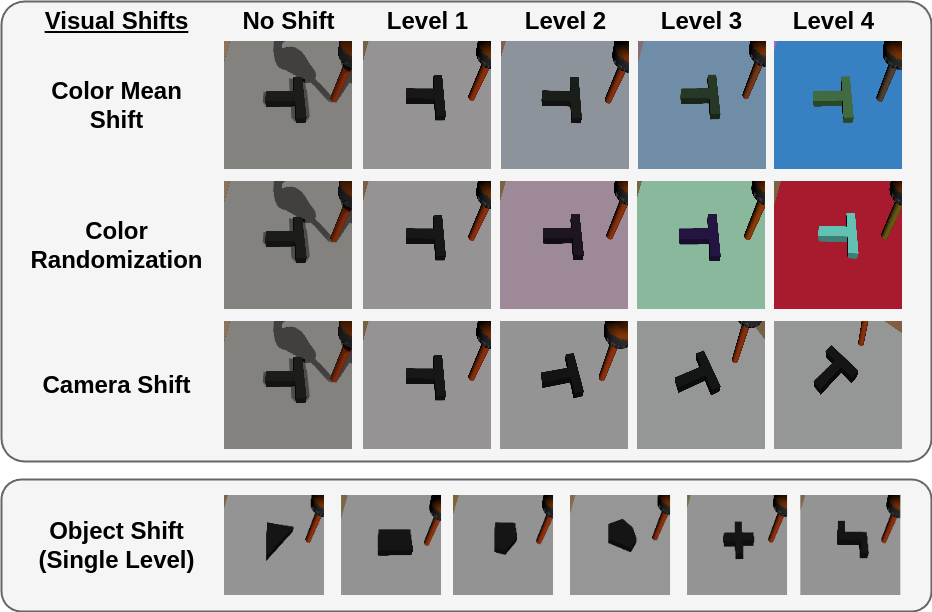
How do visual, physics, and task shift on performance?
Reducing all shifts improves performance
Paradoxically, some visual shift is required for good performance!
Cotraining performance is more sensitive to physics and task shifts.
Sim-and-Real Distinguishability
Real-World Demo
Policy Rollout
(Cotrained)
Simulated Demo
- Fix orientation, then translation
- Sticking & sliding contacts
- Similar to real-world demos
- Fix orientation and translation simultaneously
- Sticking contacts only
High-performing policies must learn to identify sim vs real
since the physics of each environment requires different actions
2x
2x
2x
Positive Transfer
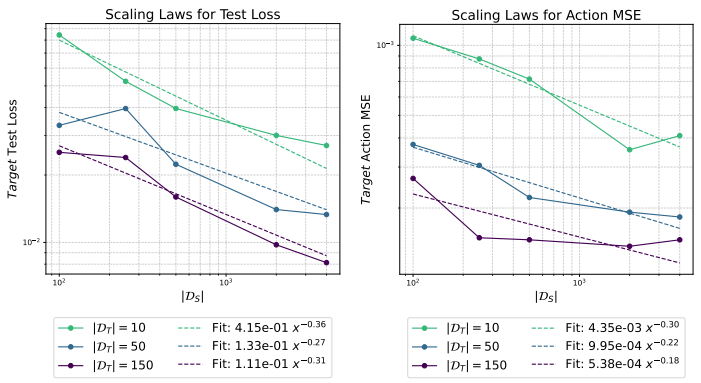
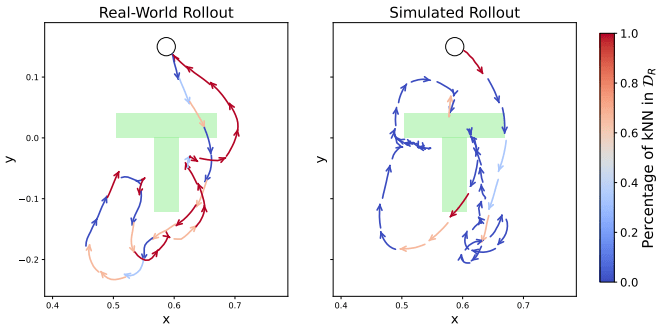
Sim data improves dataset coverage
Training on sim reduces test loss in real (power law)
Thank you!
Please refer to the paper for more experiments and details.
IROS Submission Video 2025
By weiadam



