Approximating Configuration Space with Few Convex Sets Using Clique Cover
With Peter Werner, Tobia Marcucci, and Russ Tedrake



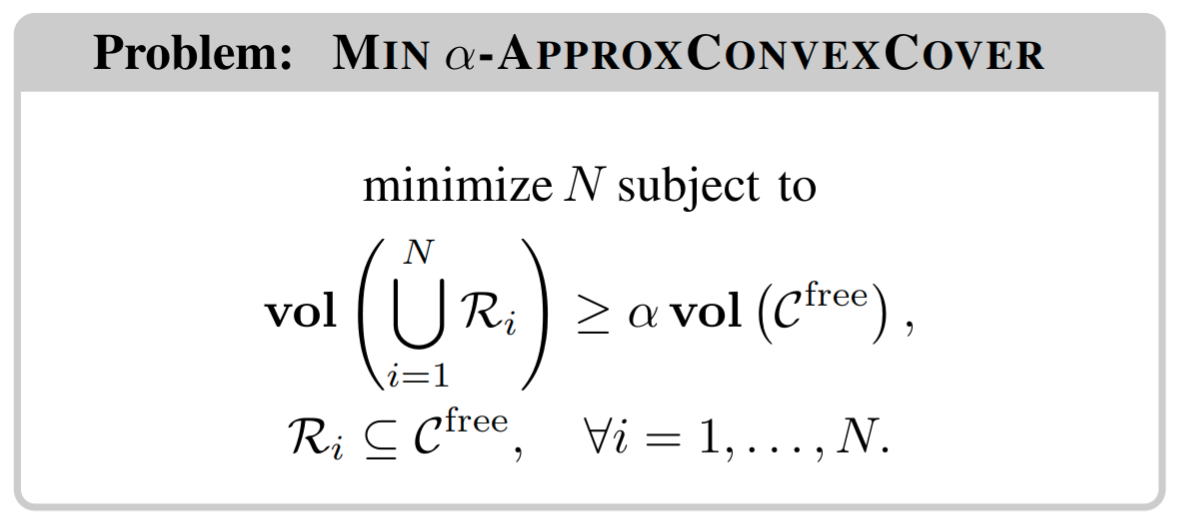
Problem Statement
How Hard Is This?
- Exact Cover of 2D polygon:
\exists \mathbb{R}-\text{complete}
- Approximate Cover:
As hard as checking if a system of polynomial equations has a root.
\text{APX}-\text{Hard}
No polynomial time algorithm can achieve an approximation ratio bounded by a constant factor.
There is an algorithm which achieves a logarithmic performance in the number of vertices with runtime
\mathcal{O}(n^{29} \log(n))
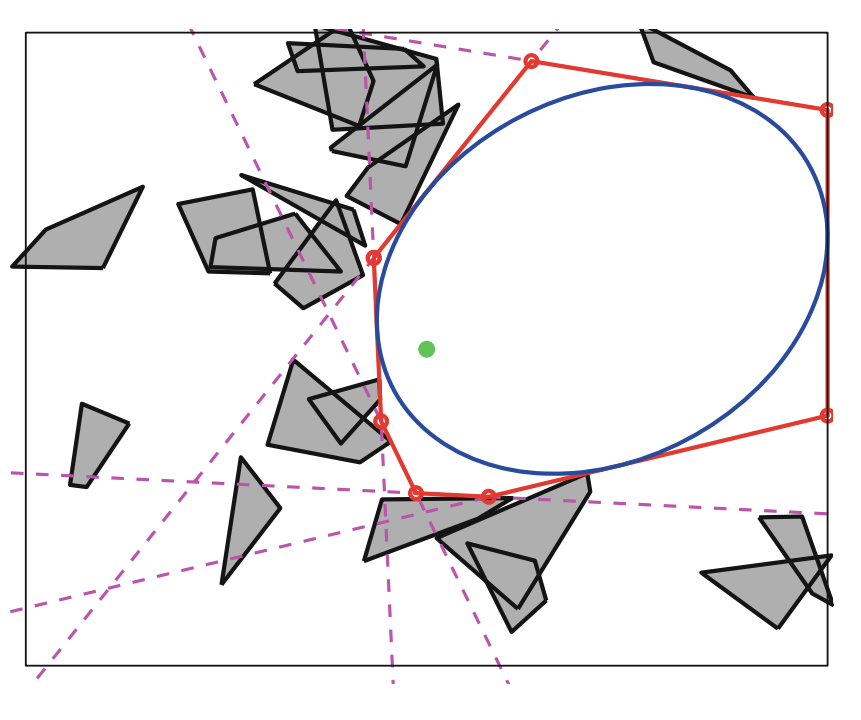
Iterative Regional Inflation by Semidefinite programming (IRIS)
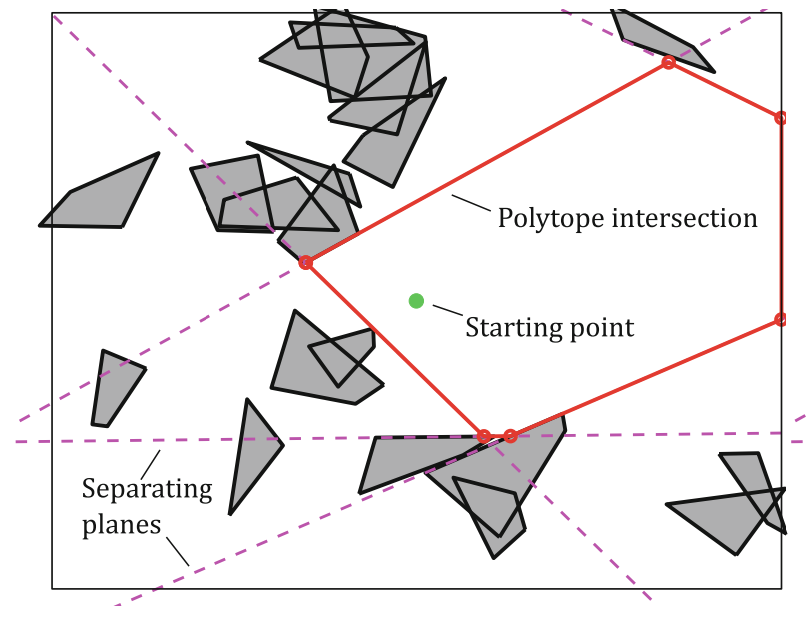
Credits: Robin Deits
Iterative Regional Inflation by Semidefinite programming (IRIS)
Credits: Robin Deits
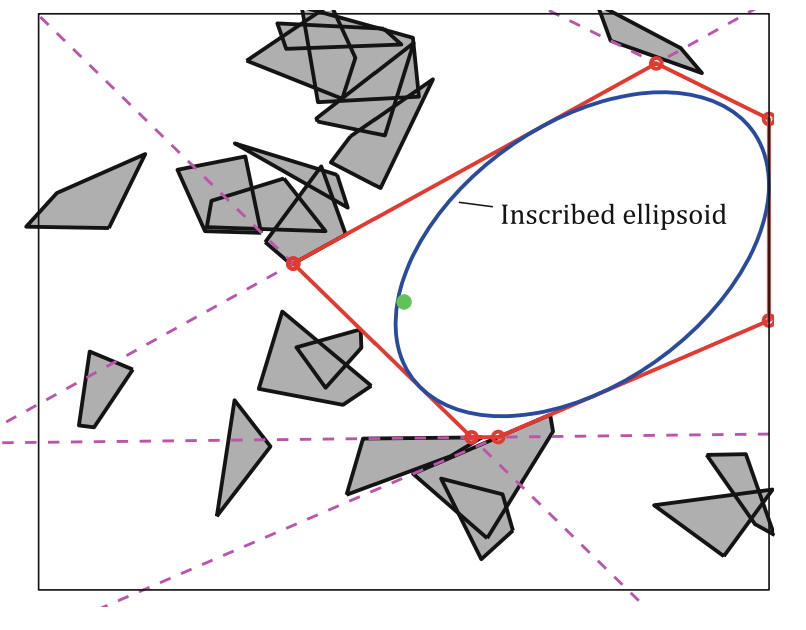
Iterative Regional Inflation by Semidefinite programming (IRIS)
Credits: Robin Deits
Iterative Regional Inflation by Semidefinite programming (IRIS)
Credits: Robin Deits
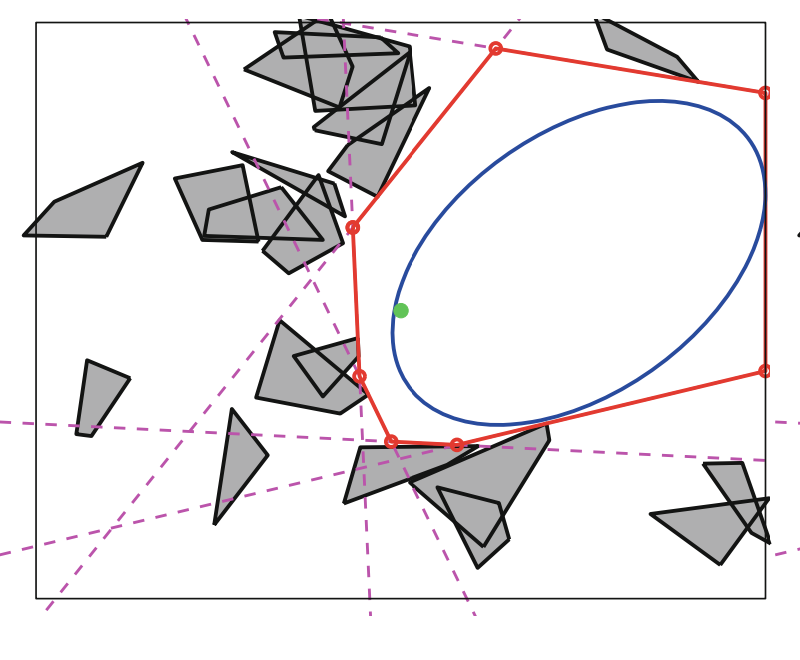
Iterative Regional Inflation by Semidefinite programming (IRIS)
Credits: Robin Deits
IRIS Steps
IRIS Features

IRIS Features
Credit: Tommy Cohn
From a Single Region To A Cover
Naive Strategy
DownSides
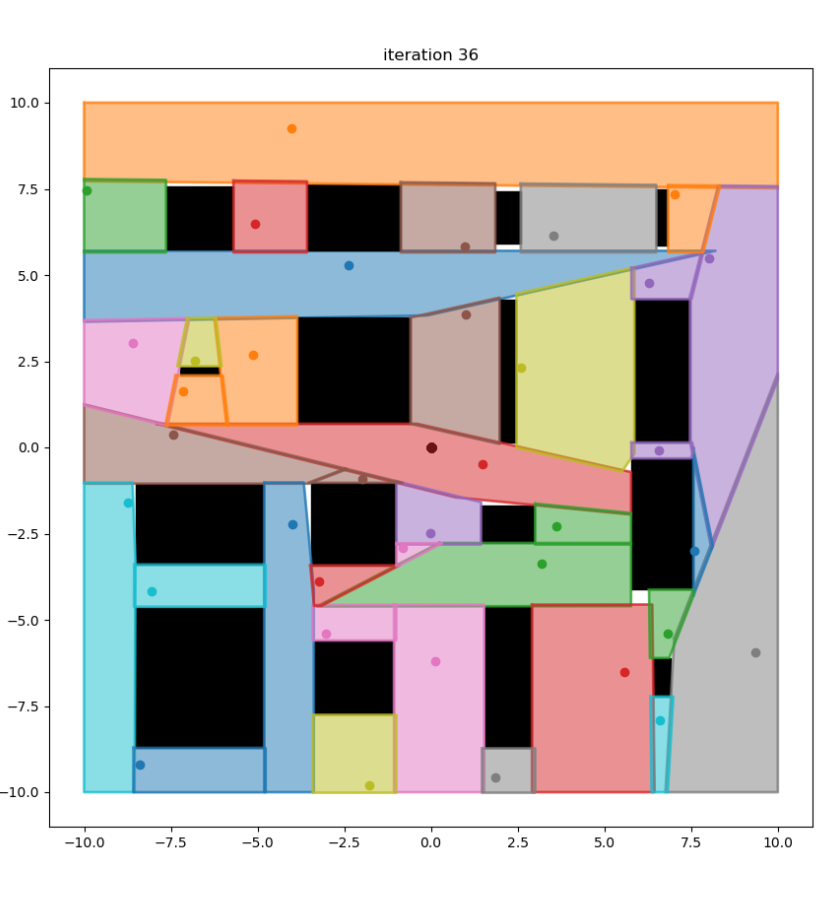
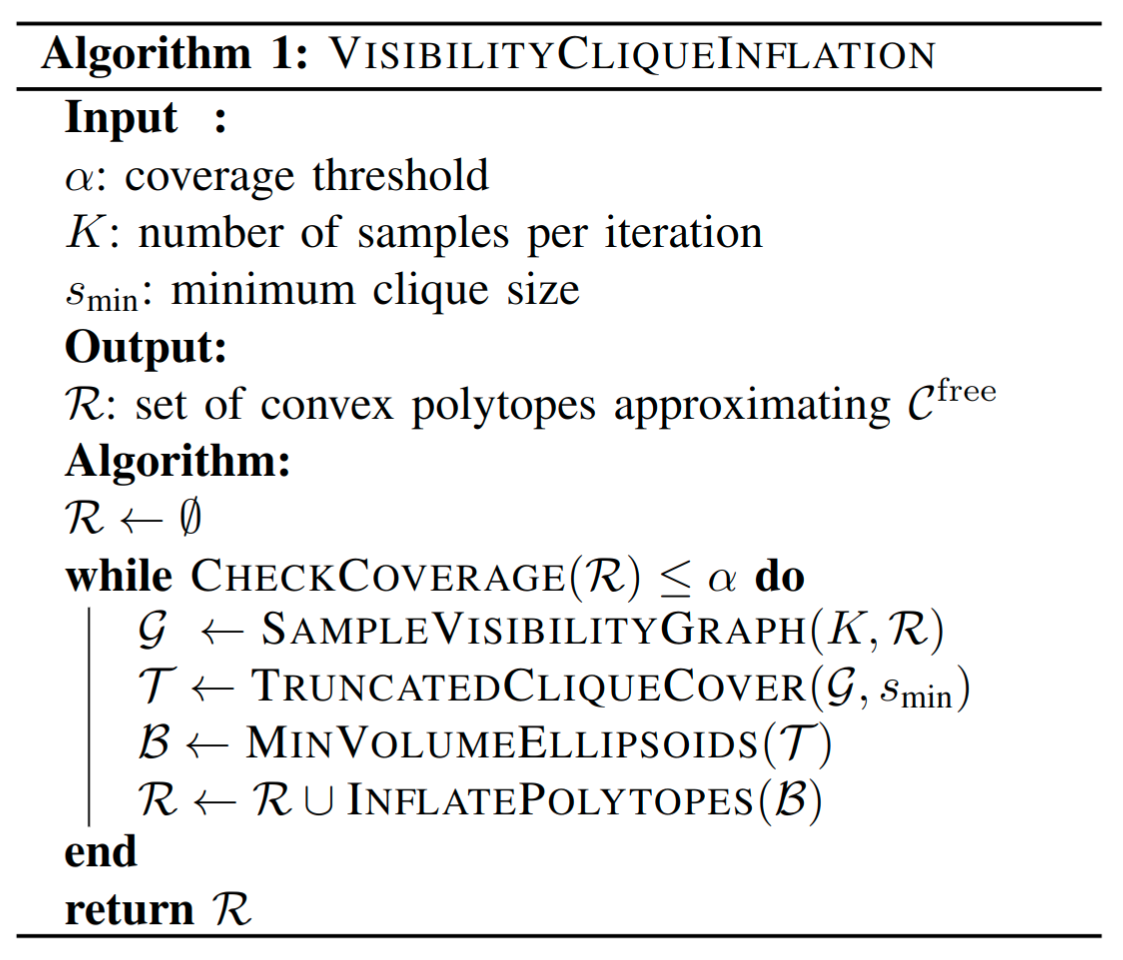
Visibility Clique Cover
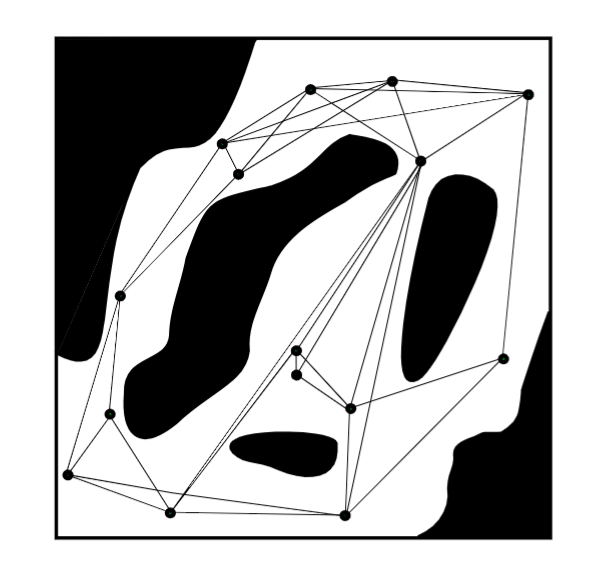
Visibility Clique Cover
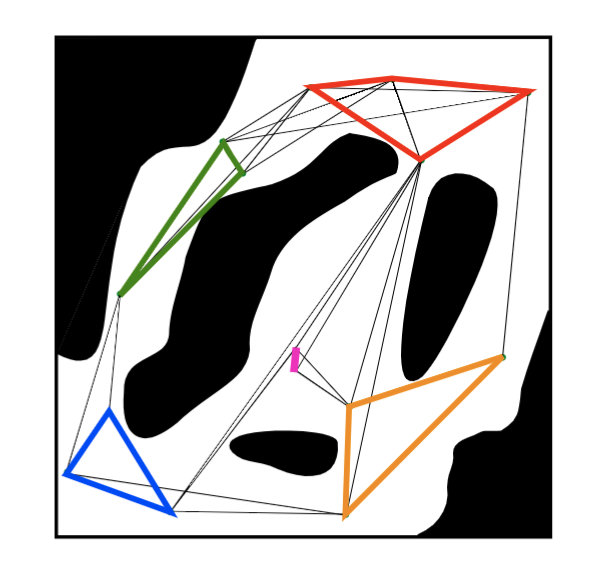
Visibility Clique Cover

Visibility Clique Cover
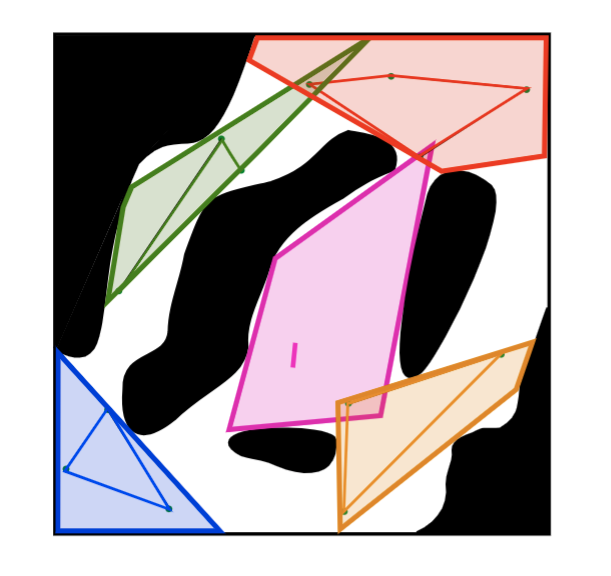
Visibility Clique Cover
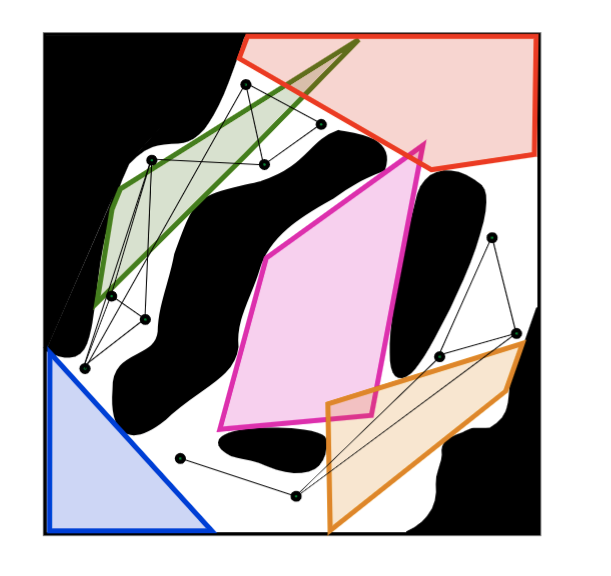
Visibility Clique Cover
Intuition
\text{If } q_{1}, q_{2} \in \mathcal{K}, t \in [0,1], \\
\text{then } tq_{1} + (1-t)q_{2} \subseteq \mathcal{C}^{free}
\text{If } q_{1},~q_{2} \in \mathcal{R},~t \in [0,1], \\ \text{ then } tq_{1} + (1-t)q_{2} \in \mathcal{R}
Clique Cover MIP
\min \sum_{1 \leq i \leq M} c_{i} \textbf{ subject to }
\\
\sum_{i = 1}^{M} x_{v i} = 1 ~ \forall v \in \mathcal{V}
\\
x_{ui} + x_{vi} \leq c_{i} ~ \forall (u,v) \notin \mathcal{E}
\\
x_{vi}, c_{i} \in \{0,1\}
Max Clique Mip
\max \sum_{i} x_{i} \textbf{ subject to }
\\
x_{i} + x_{j} \leq 1 \text{ if } (i,j) \notin \mathcal{E}
\\
x_{i} \in \{0,1\}
Advantages
| Village | # of Regions | Time To Construct |
| Ours | 94 | 28 min |
| Naive | 198 | 45 min |
https://wernerpe.github.io/files/Village.html
| IIWA | # of Regions | Time To Construct |
| Ours | 46 | 95 min |
| Naive | 483 | 1483 min |
https://wernerpe.github.io/files/7DOF_IIWA_arxiv.html
Limitations
The rest of this talk is work in progress
And (Maybe) How to Fix them
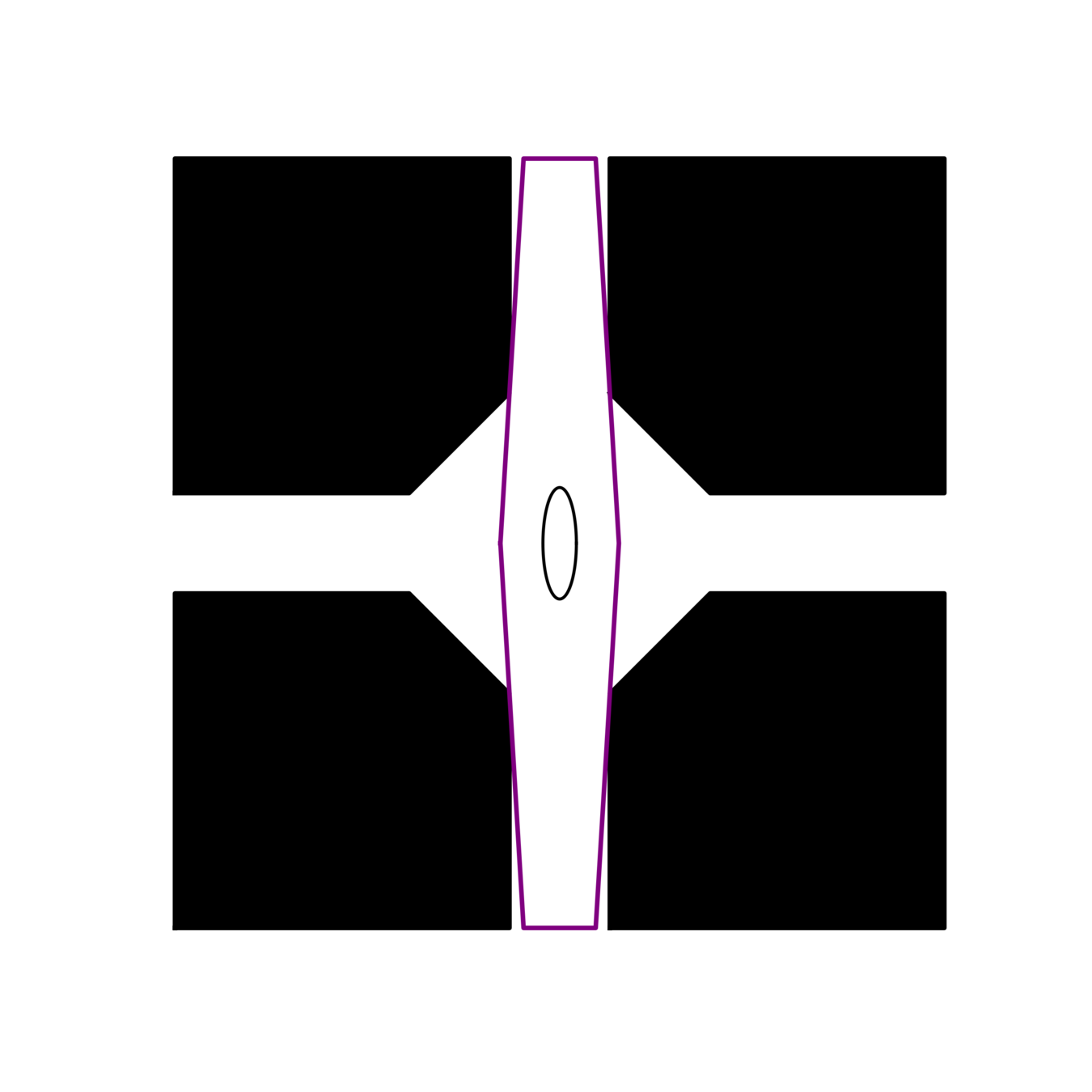
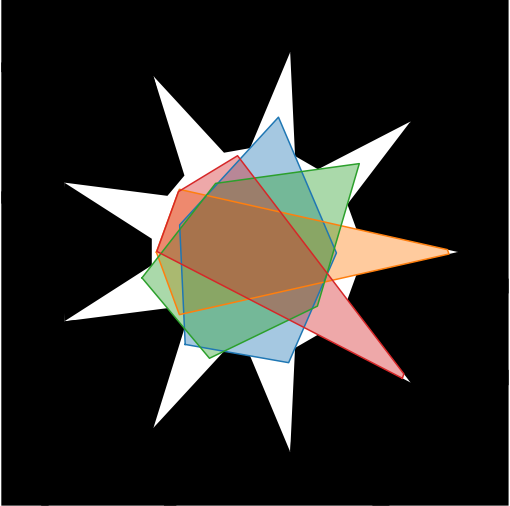
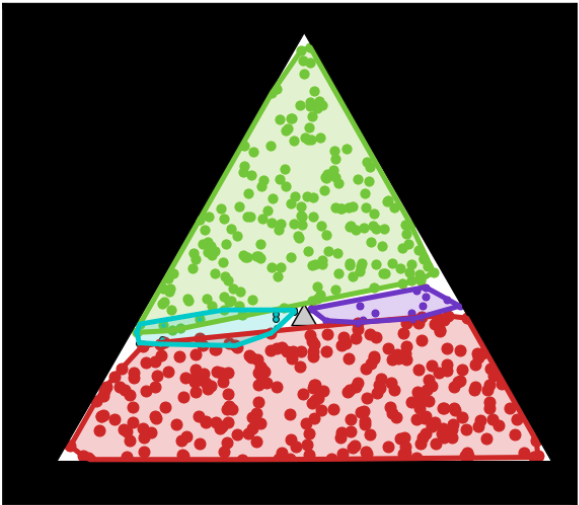
Are ClIques Convex Sets?
Not Even With Infinite Samples
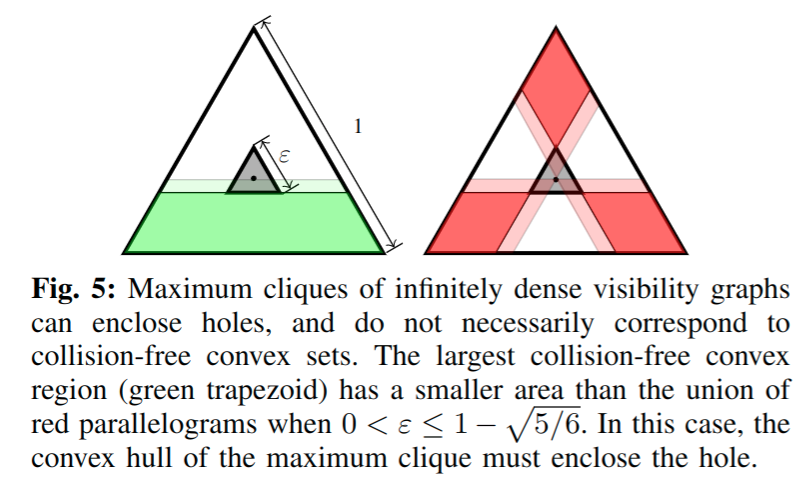
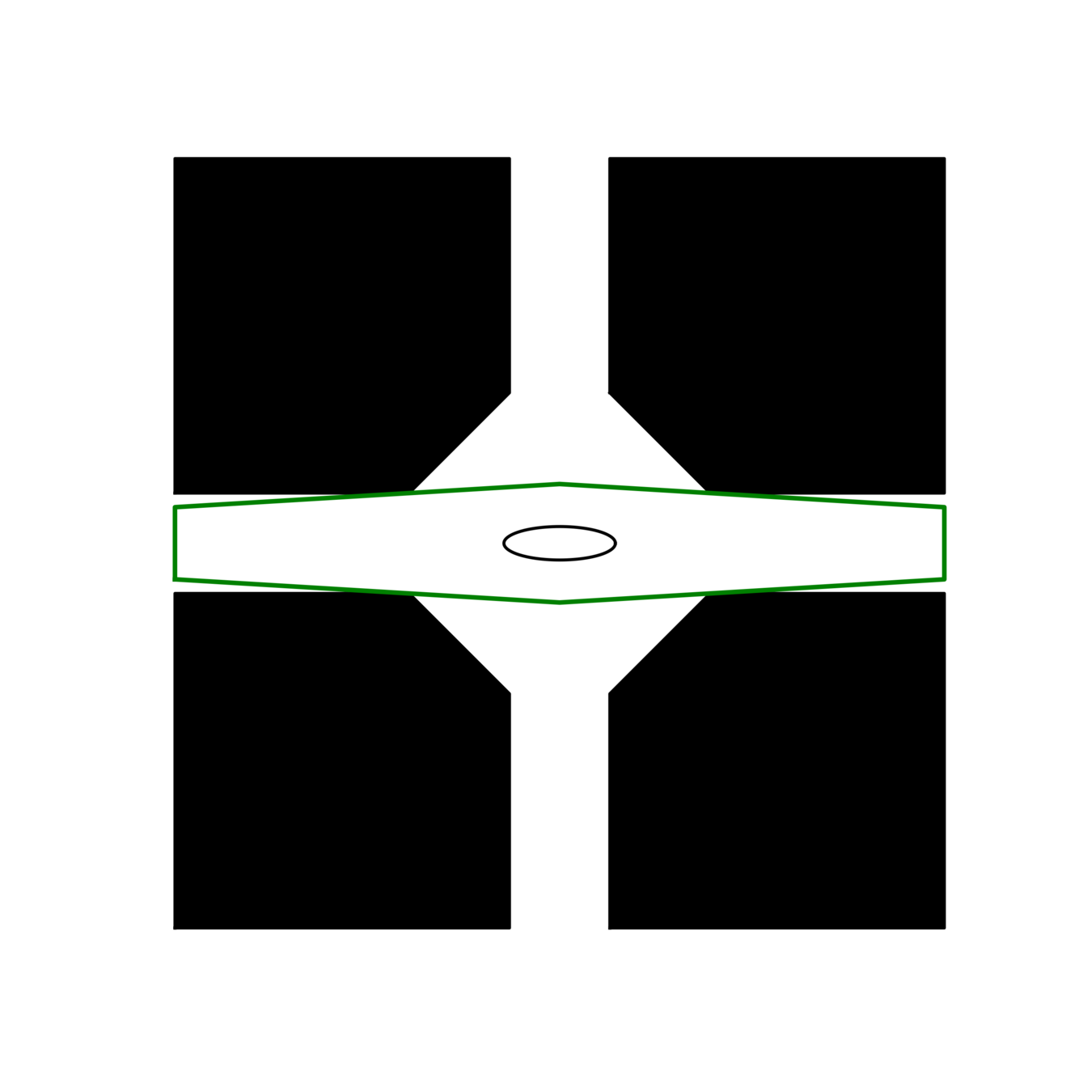
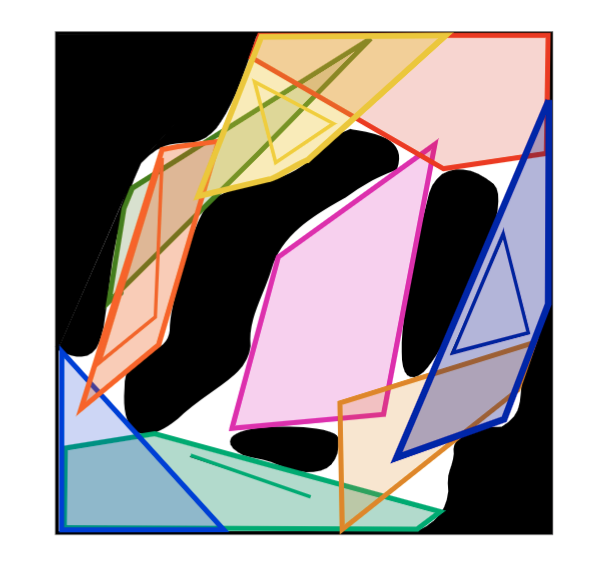
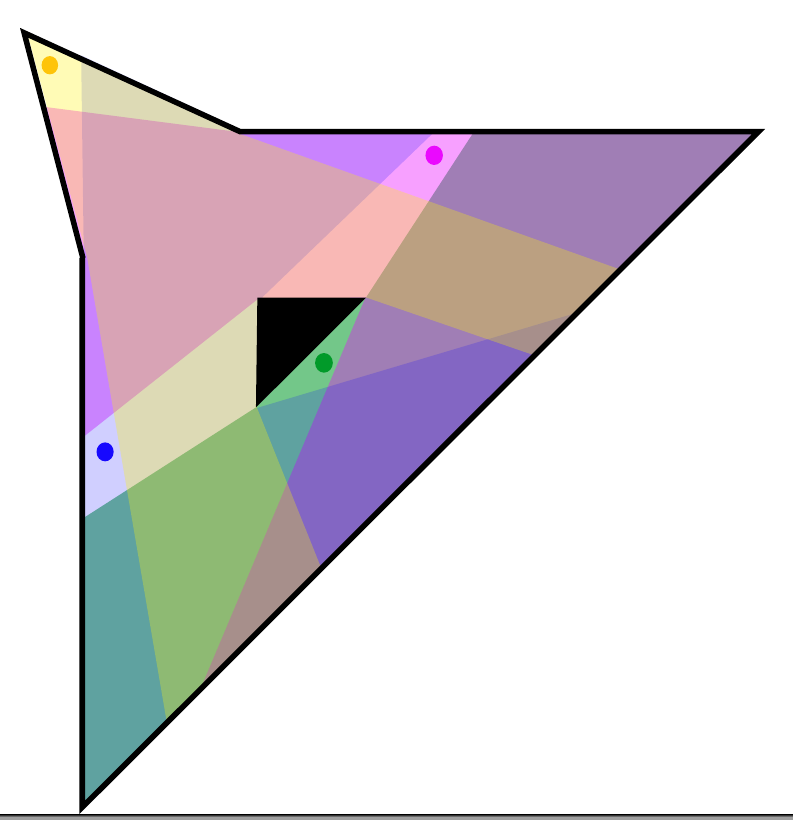
The minimum Clique Cover isn't The Minimum ConveX Cover
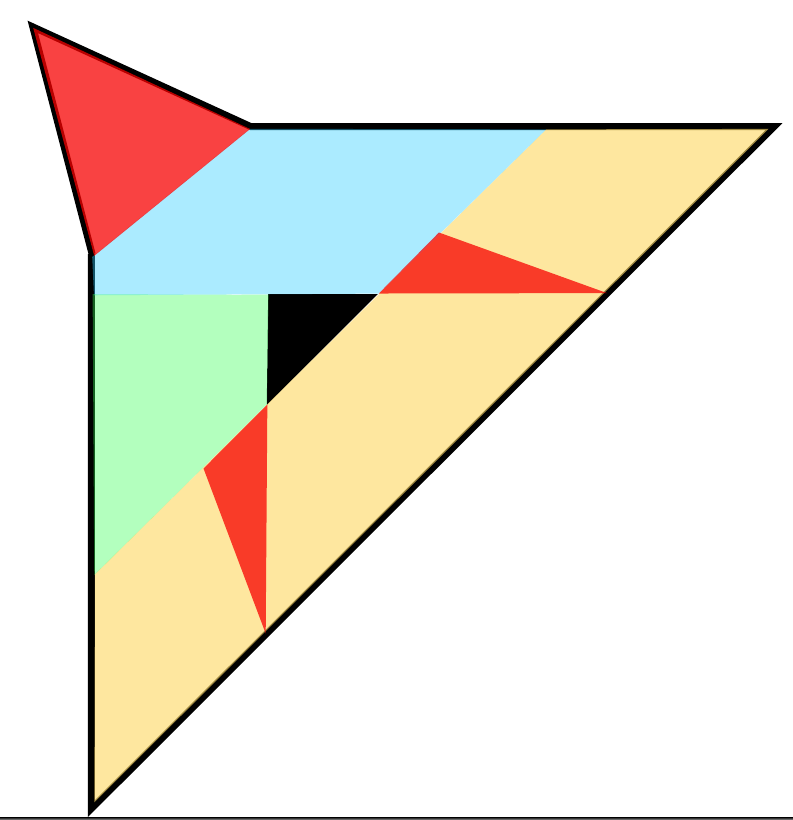
The minimum Clique Cover isn't The Minimum ConveX Cover
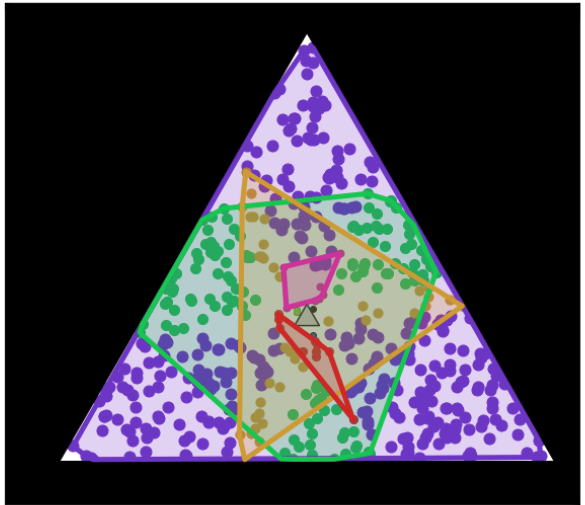
Obviously a problem
Solution
Ask for a clique cover that is more like a convex set
\max \sum_{i} x_{i} \textbf{ subject to }
\\
x_{i} + x_{j} \leq 1 \text{ if } (i,j) \notin \mathcal{E}
\\
x_{i} \in \{0,1\}
x_{i} \in \textbf{conv}\left(\mathcal{K}\right) \implies x_{i} \in \mathcal{K}
If the convex hull condition is violated, then your clique must contain a collision
Solution 1
\max_{x, c} \sum_{i} x_{i} \textbf{ subject to }
\\
x_{i} + x_{j} \leq 1 \text{ if } (i,j) \notin \mathcal{E}
\\
x_{i} \in \{0,1\}
c_{i}^{T}(q_{i} - q_{j}) \geq (1- x_{i}) - M_{ij}(1-x_{j})
If the th point is in the clique, but the th point is not, then find a separating plane between them.
i
j
Solution 2
\max_{x, E} \sum_{i} x_{i} \textbf{ subject to }
\\
x_{i} + x_{j} \leq 1 \text{ if } (i,j) \notin \mathcal{E}
\\
x_{i} \in \{0,1\}
\begin{bmatrix} q_{i} \\ 1 \end{bmatrix}^{T}
E
\begin{bmatrix} q_{i} \\ 1 \end{bmatrix}
\leq 1 + M_{i}(1-x_{i})
\begin{bmatrix} q_{i} \\ 1 \end{bmatrix}^{T}
E
\begin{bmatrix} q_{i} \\ 1 \end{bmatrix}
\geq (1-x_{i})
Find a classifier for the clique whose decision boundary is a convex set
Addresses the Problem
Addresses the Problem
At the cost that Clique Cover now takes 20 times longer
Are All PartS of the Free Configuration Space Equal?
Big C-Space Regions Aren't Always Useful
Our Target C-Space is 14+ Dimensional
Proposal: Sample in Task SpaceThe Mode problem
The Mode problem
Task-Space Rapidly Exploring Random Tree
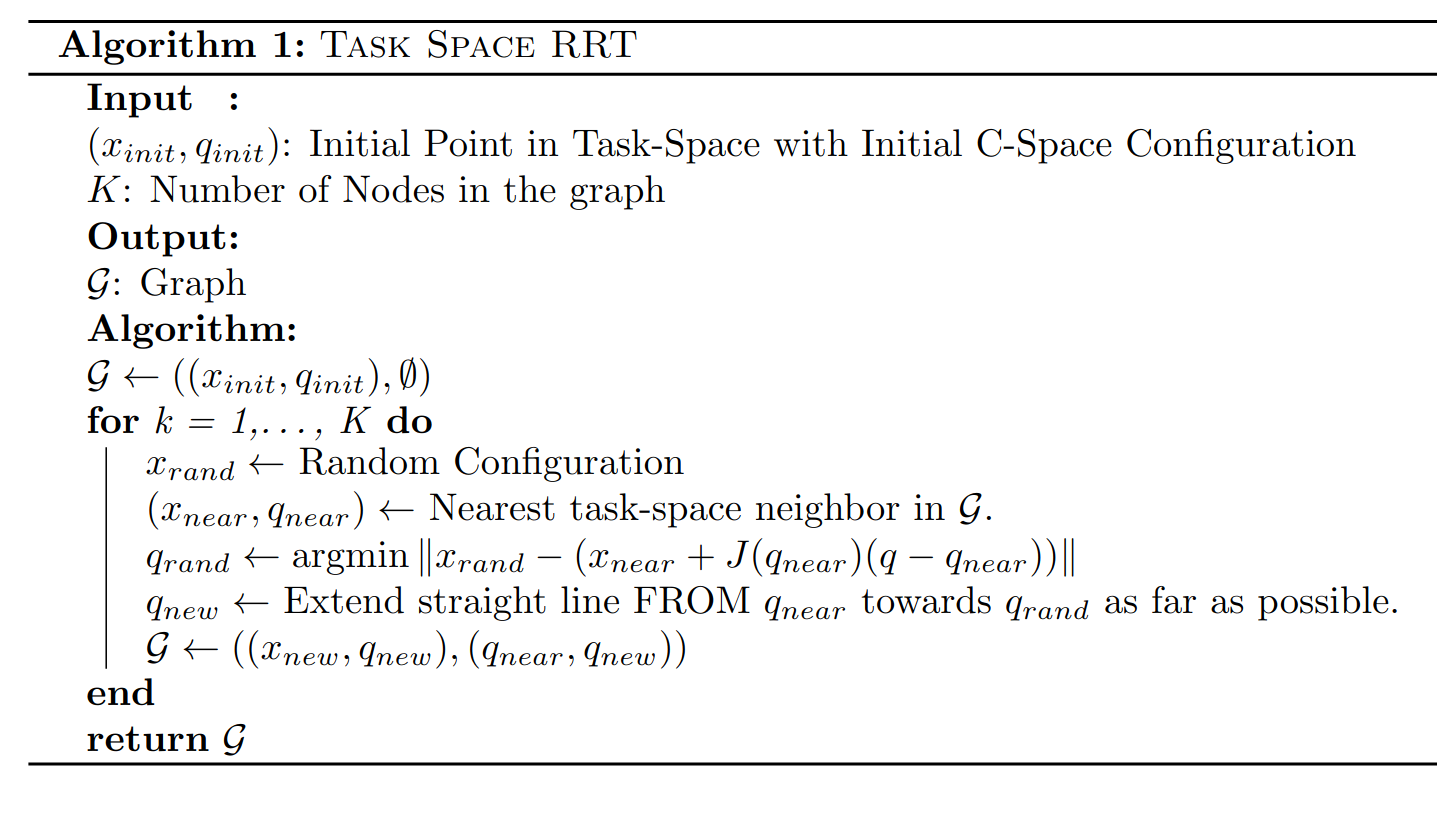
Voronoi Bias In Task Space
Recap
Question 1: How can we put more geometric information in the clique cover to better approximate convex cover?
Question 2: How can we leverage task space to generate a better sampling distribution?
Concise Clique Covers
By Alexandre Amice



