Adapted Solvers For Graphs Of Convex Sets
Alexandre Amice
Amazon Fall 2025



Motivation: GCS is Very Flexible
Object Rearrangement
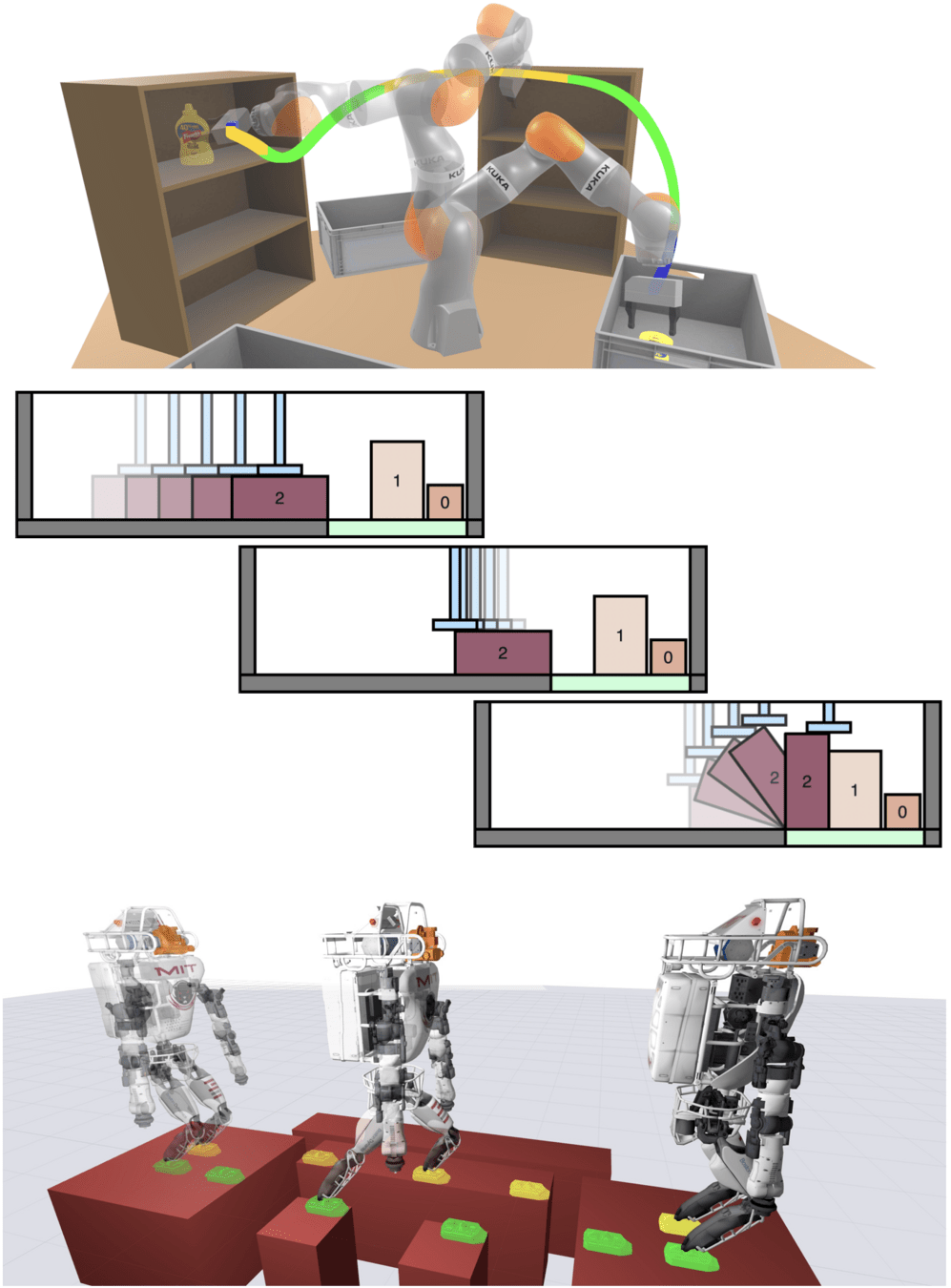
Motivation: GCS is Very Flexible
Object Rearrangement
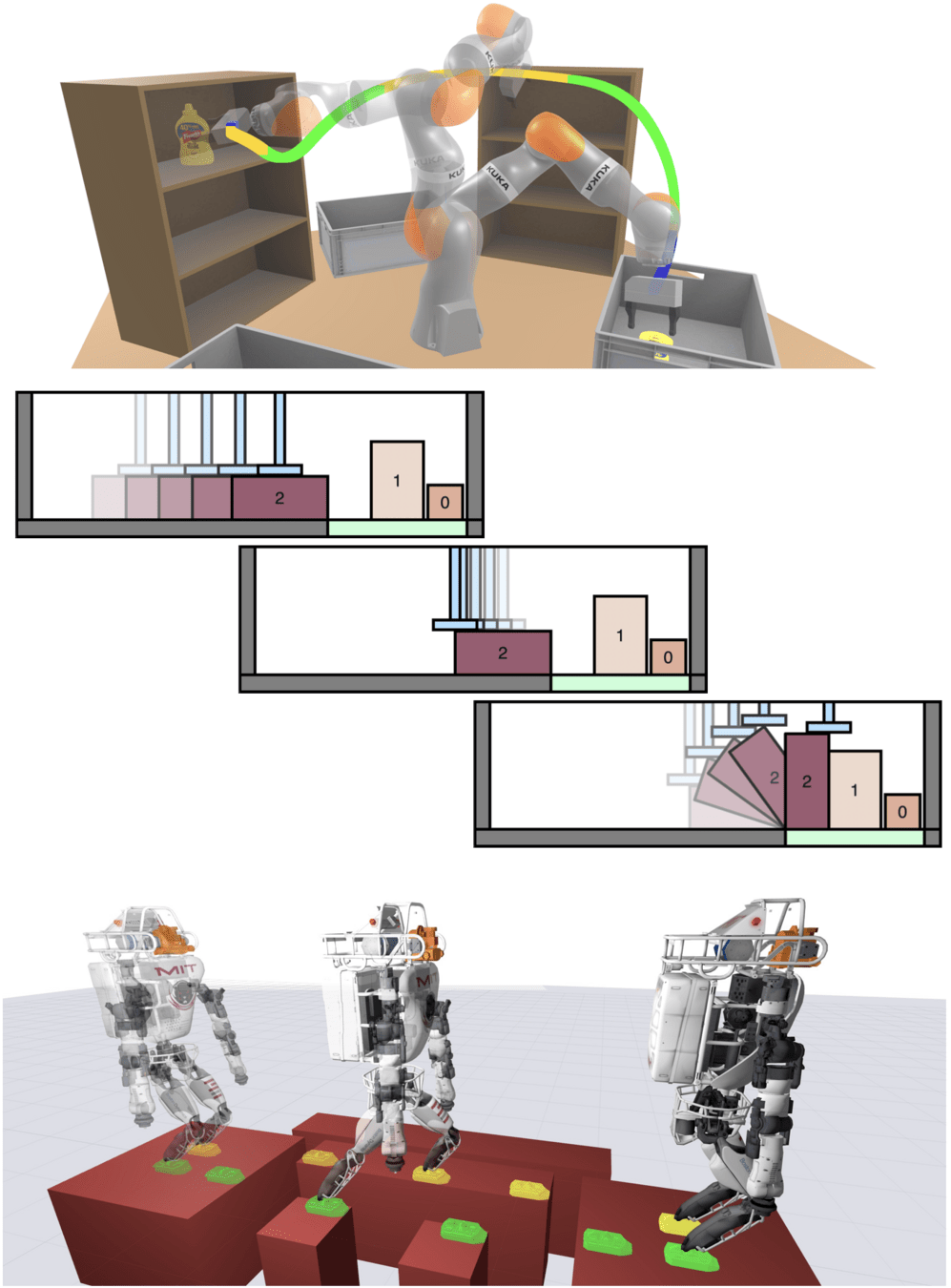
Dynamic Motion Planning
Motivation: GCS is Very Flexible
Object Rearrangement
Dynamic Motion Planning
Contact Rich Manipulation
Motivation: GCS is Very Flexible
Object Rearrangement
Dynamic Motion Planning
More Complicated Graphs
More Complicated Sets
Contact Rich Manipulation
Complexity of Solving Methodology
A GCS with:
- n vertices
- Each vertex has m edges
- Each set has dimension d
\mathcal{O}(\text{poly}(nmd))
Current State of the Art
Solver Wishlist
A GCS with:
- n vertices
- Each vertex has m edges
- Each set has dimension d
\mathcal{O}(n(\text{poly}(m)+\text{poly}(d))
Target Complexity
Solver Wishlist
Target Complexity
Also Want
- Advances in graph algorithms should transfer
- Advances in convex optimization solvers should transer
- Naturally leverage HPC techniques like GPUs/Clusters.
\mathcal{O}(n(\text{poly}(m)+\text{poly}(d))
Solve GCS at Any Scale
Object Rearrangement
Dynamic Motion Planning
More Complicated Graphs
More Complicated Sets
Contact Rich Manipulation
The Journey Of A GCS Problem
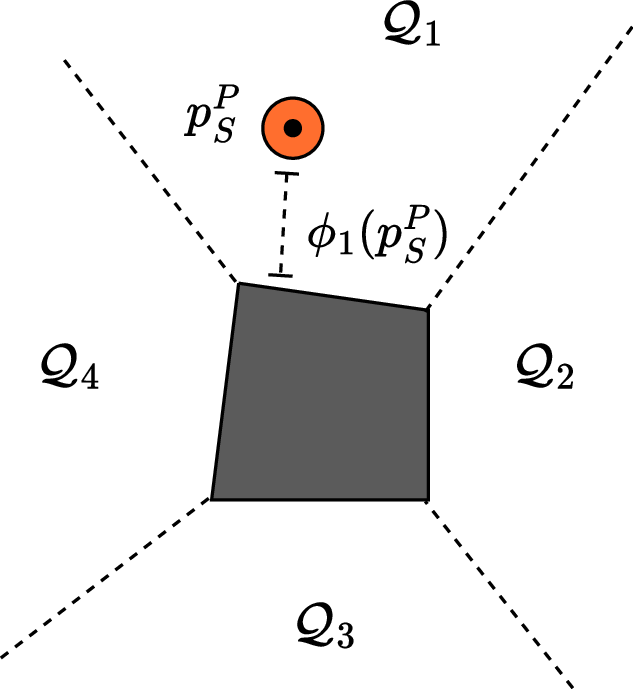
Problem
Model
The Journey Of A GCS Problem
Model
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}y_{e}f_{e}(x_{u},x_{v})\\
\text{subject to }&
y_{v}x_{v} \in y_{v}\mathcal{X}_{v} ~\forall v \in \mathcal{V}
\\
&
y_{e}(x_{u}, x_{v}) \in y_{e}\mathcal{X}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
y \text{ encodes a path },~~ y\in \{0,1\}
\end{aligned}
The Journey Of A GCS Problem
Model
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}y_{e}f_{e}(x_{u},x_{v})\\
\text{subject to }&
y_{v}x_{v} \in y_{v}\mathcal{X}_{v} ~\forall v \in \mathcal{V}
\\
&
y_{e}(x_{u}, x_{v}) \in y_{e}\mathcal{X}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
y \text{ encodes a path },~~ y\in \{0,1\}
\end{aligned}
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
Standardize
The Journey Of A GCS Problem
Model
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}y_{e}f_{e}(x_{u},x_{v})\\
\text{subject to }&
y_{v}x_{v} \in y_{v}\mathcal{X}_{v} ~\forall v \in \mathcal{V}
\\
&
y_{e}(x_{u}, x_{v}) \in y_{e}\mathcal{X}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
y \text{ encodes a path },~~ y\in \{0,1\}
\end{aligned}
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
Standardize
Form Relaxation
The Journey Of A GCS Problem
Model
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}y_{e}f_{e}(x_{u},x_{v})\\
\text{subject to }&
y_{v}x_{v} \in y_{v}\mathcal{X}_{v} ~\forall v \in \mathcal{V}
\\
&
y_{e}(x_{u}, x_{v}) \in y_{e}\mathcal{X}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
y \text{ encodes a path },~~ y\in \{0,1\}
\end{aligned}
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
Standardize
Form Relaxation
\begin{aligned}
\min_{\lambda}~& g^{T}\lambda \\
\text{subject to }~& T\lambda - s \in \mathcal{K}
\end{aligned}
Parse To Conic Form
Solve
The Journey Of A GCS Problem
Form Relaxation
\begin{aligned}
\min_{\lambda}~& g^{T}\lambda \\
\text{subject to }~& T\lambda - s \in \mathcal{K}
\end{aligned}
Parse To Conic Form
Destroys Structure
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
Form Relaxation
The Structure of The Relaxation
The Structure of The Relaxation
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
\begin{gathered}
\min
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e})
\\
\text{subject to}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}} & \dots & z_{e_{m}} & x_{v} \\
y_{v} & y_{e_{1}} & \dots & y_{e_{m}} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}}
\\
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}} \\ z_{e_{v}} \\ y_{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}
\\
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0
\end{gathered}
The Structure of The Relaxation
\begin{gathered}
\min
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e})
\\
\text{subject to}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}} & \dots & z_{e_{m}} & x_{v} \\
y_{v} & y_{e_{1}} & \dots & y_{e_{m}} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}}
\\
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}} \\ z_{e_{v}} \\ y_{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}
\\
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0
\end{gathered}
The relaxation keeps the graph and convex sets factored
The Structure of The Relaxation
Relaxation
Destroys Structure
\begin{aligned}
\min_{\lambda}~& g^{T}\lambda \\
\text{subject to }~& T\lambda - s \in \mathcal{K}
\end{aligned}
-
Flattens a sparse, matrix optimization into a vector optimization.
-
Vector optimization is denser, more irregularly patterned, and worse conditioned.
-
Vector optimization obfuscates the role of the graph vs the convex sets
Lower Bound Work Per Iteration
Relaxation
Destroys Structure
\begin{aligned}
\min_{\lambda}~& g^{T}\lambda \\
\text{subject to }~& T\lambda - s \in \mathcal{K}
\end{aligned}
A GCS with:
- n vertices
- Each vertex has m edges
- Each set has dimension d
Lower Bound
\mathcal{O}(n^{3}m^{3}d^{3})
Lower Bound
\mathcal{O}(n(m^{3}+d^{3}))
An ADMM Based Solver For Gcs
Alternating Direction Method of Multipliers
\begin{aligned}
\min~& \sum_{i}f_{i}(x_{i}) + \sum_{j}g_{j}(z_{j})
\\
\text{subject to}~&
x_{i} = z_{j} ~\text{for some pairs} (i,j)
\end{aligned}
A simple algorithm for solving problems of the form
Alternating Direction Method of Multipliers
\begin{aligned}
\min~& \sum_{i}f_{i}(x_{i}) + \sum_{j}g_{j}(z_{j})
\\
\text{subject to}~&
x_{i} = z_{j} ~\text{for some pairs} (i,j)
\end{aligned}
x_{i}^{k+1} \gets \min_{x_{i}} f_{i}(x_{i}) + \sum_{(i,j)} \frac{\rho}{2}||x_{i} - z_{j}^{k} + \mu_{ij}^{k}||^{2}
z_{j}^{k+1} \gets \min_{z_{j}} g_{j}(z_{j}) + \sum_{(i,j)} \frac{\rho}{2}||x_{i}^{k+1} - z_{j} + \mu_{ij}^{k}||^{2}
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
1.
2.
3.
Alternating Direction Method of Multipliers
\begin{aligned}
\min~& \sum_{i}f_{i}(x_{i}) + \sum_{j}g_{j}(z_{j})
\\
\text{subject to}~&
x_{i} = z_{j} ~\text{for some pairs} (i,j)
\end{aligned}
\begin{gather*}
\min
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e})
\\
\text{subject to}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}} & \dots & z_{e_{m}} & x_{v} \\
y_{v} & y_{e_{1}} & \dots & y_{e_{m}} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in \\
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}}
\\
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}} \\ z_{e_{v}} \\ y_{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}
\\
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0
\end{gather*}
Alternating Direction Method of Multipliers
\begin{gather*}
\min
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e})
\\
\text{subject to}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}} & \dots & z_{e_{m}} & x_{v} \\
y_{v} & y_{e_{1}} & \dots & y_{e_{m}} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in \\
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}},~\forall v \in \mathcal{V}
\\
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}} \\ z_{e_{v}} \\ y_{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}
\\
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0
\end{gather*}
Alternating Direction Method of Multipliers
\begin{gather*}
\min
{\color{red}
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}^{e})
}
\\
\text{subject to}
{\color{blue}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}} & \dots & z_{e_{m}} & x_{v} \\
y_{v}^{v} & y_{e_{1}}^{v} & \dots & y_{e_{m}}^{v} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in} \\
{\color{blue}
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}},~\forall v \in \mathcal{V}
}
\\
{\color{red}
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}} \\ z_{e_{v}} \\ y_{e}^{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}}
\\
{\color{orange}A_{\mathcal{P}}{y}-b_{\mathcal{P}} \geq 0}
\\
{\color{blue}y_{v}^{v}} = {\color{orange}y_{v}},~
{\color{blue}y_{e}^{v}} = {\color{orange}y_{e}},~
\end{gather*}
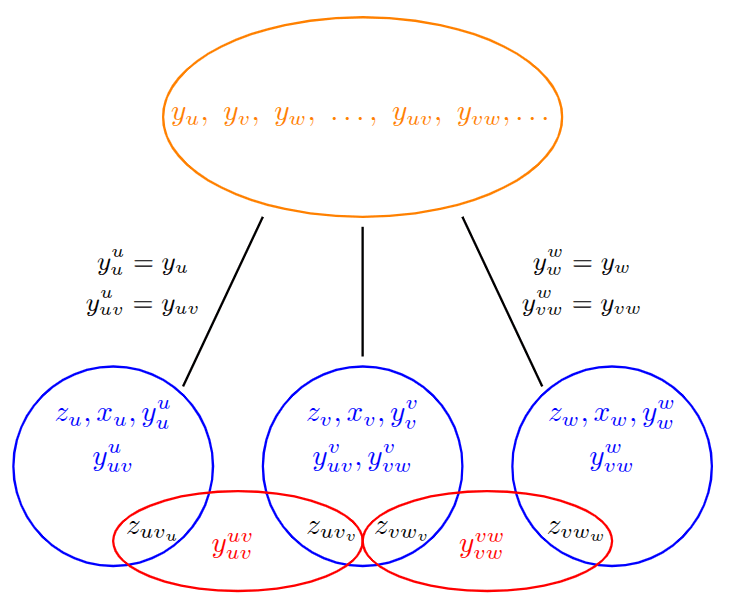
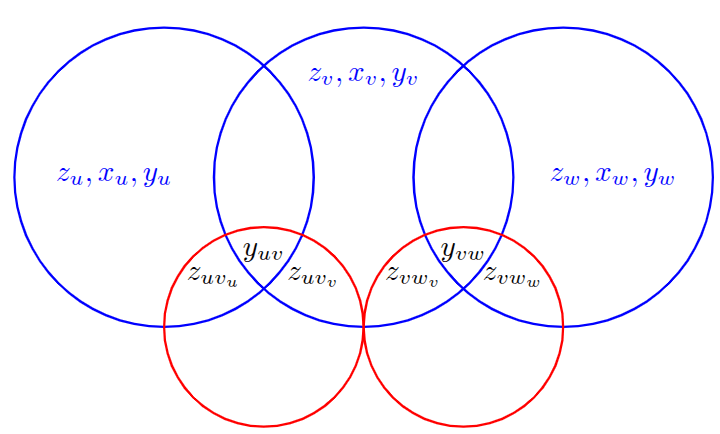
Separates the graph problem from the convex problem.
Alternating Direction Method of Multipliers
\begin{gather*}
\min
{\color{red}
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}^{e})
}
\\
\text{subject to}
{\color{blue}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}}^{v} & \dots & z_{e_{m}}^{v} & x_{v} \\
y_{v}^{v} & y_{e_{1}}^{v} & \dots & y_{e_{m}}^{v} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in} \\
{\color{blue}
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}},~\forall v \in \mathcal{V}
}
\\
{\color{red}
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}}^{e} \\ z_{e_{v}}^{e} \\ y_{e}^{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}}
\\
{\color{orange}A_{\mathcal{P}}{y}-b_{\mathcal{P}} \geq 0}
\\
{\color{blue}y_{v}^{v}} = {\color{orange}y_{v}},~
{\color{blue}y_{e}^{v}} = {\color{orange}y_{e}},~
\\
{\color{blue}z_{e_{v}}^{v}} = {\color{red}z_{e_{v}^{e}}}
\end{gather*}
Separates the vertices from the edges
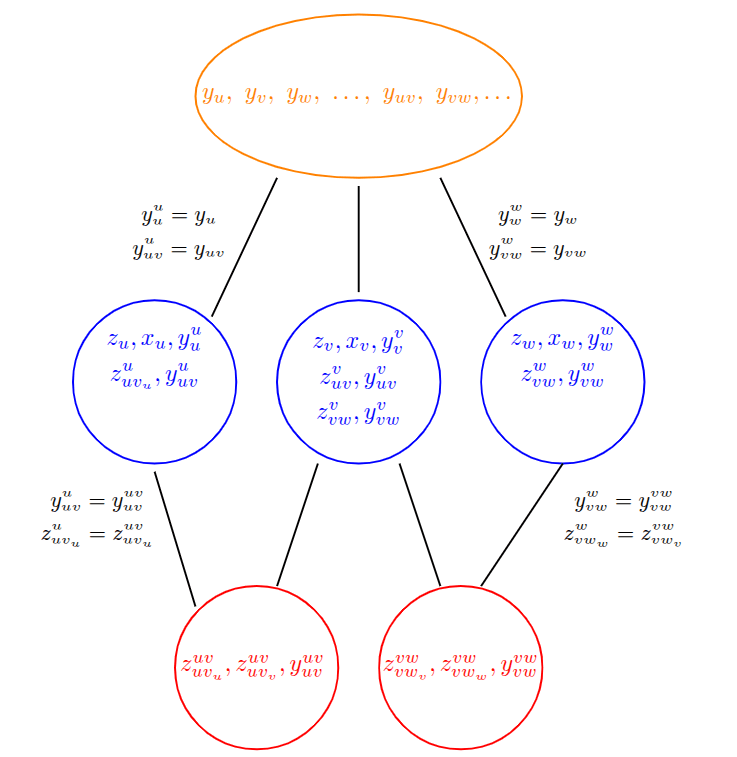
Alternating Direction Method of Multipliers
\begin{gather*}
\min
{\color{red}
\sum_{e\in\mathcal{E}} c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}^{e})
}
\\
\text{subject to}
{\color{blue}
\begin{bmatrix}
A_{v} & -b_{v}
\end{bmatrix}
\begin{bmatrix}
z_{v} & z_{e_{1}}^{v} & \dots & z_{e_{m}}^{v} & x_{v} \\
y_{v}^{v} & y_{e_{1}}^{v} & \dots & y_{e_{m}}^{v} & 1
\end{bmatrix}
\begin{bmatrix}
C_{v}^{T} \\ -d_{v}^{T}
\end{bmatrix} \in} \\
{\color{blue}
\underbrace{
\begin{bmatrix}
\mathcal{K}_{v} & \dots & \mathcal{K}_{v}
\end{bmatrix}
}_{\text{number of incident edges}},~\forall v \in \mathcal{V}
}
\\
{\color{red}
\begin{bmatrix}
A_{e} & -b_{e}
\end{bmatrix}
\begin{bmatrix}
z_{e_{u}}^{e} \\ z_{e_{v}}^{e} \\ y_{e}^{e}
\end{bmatrix}
\in \mathcal{K}_{e}, ~\forall e \in \mathcal{E}}
\\
{\color{orange}A_{\mathcal{P}}{y}-b_{\mathcal{P}} \geq 0}
\\
{\color{blue}y_{v}^{v}} = {\color{orange}y_{v}},~
{\color{blue}y_{e}^{v}} = {\color{orange}y_{e}},~
\\
{\color{blue}z_{e_{v}}^{v}} = {\color{red}z_{e_{v}}^{e}}
\end{gather*}
x_{i}^{k+1} \gets \min_{x_{i}} f_{i}(x_{i}) + \sum_{(i,j)} \frac{\rho}{2}||x_{i} - z_{j}^{k} + \mu_{ij}^{k}||^{2}
z_{j}^{k+1} \gets \min_{z_{j}} g_{j}(z_{j}) + \sum_{(i,j)} \frac{\rho}{2}||x_{i}^{k+1} - z_{j} + \mu_{ij}^{k}||^{2}
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
1.
2.
3.
1. Solve in parallel a conic program per vertex
2a. Solve in parallel conic program per edge
2b. Solve a graph problem
Alternating Direction Method of Multipliers
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
3.
1. Solve in parallel a conic program per vertex
2a. Solve in parallel a conic program per edge
2b. Solve a graph problem
Wish List
- Advances in graph algorithms should transfer
- Advances in convex optimization solvers should transer
- Naturally leverage HPC techniques like GPUs/Clusters.
Alternating Direction Method of Multipliers
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
3.
1. Solve in parallel a conic program per vertex
2a. Solve in parallel a conic program per edge
2b. Solve a graph problem
\mathcal{O}(n\text{poly}(md))
Work per iteration
- n vertices
- Each vertex has m edges
- Each set has dimension d
A GCS with
Requires
Alternating Direction Method of Multipliers
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
3.
1. Solve in parallel a conic program per vertex
2a. Solve in parallel a conic program per edge
2b. Solve a graph problem
- No need to solve steps 1 and 2 to optimality.
- Introduces a computation/communication trade-off
- Extreme cases can lead to closed form updates.
- Naturally supports branch-and-bound cuts
Additional Features
Alternating Direction Method of Multipliers
\mu_{ij}^{k+1} \gets \mu_{ij}^{k} + (x_{i}^{k+1} - z_{j}^{k+1})
Algorithm
3.
1. Solve in parallel a conic program per vertex
2a. Solve in parallel a conic program per edge
\mathcal{O}(n(m^{3}+d^{3}))
Work per iteration
One Particularly Efficient Choice of Splitting
Requires
2b. Solve a graph problem
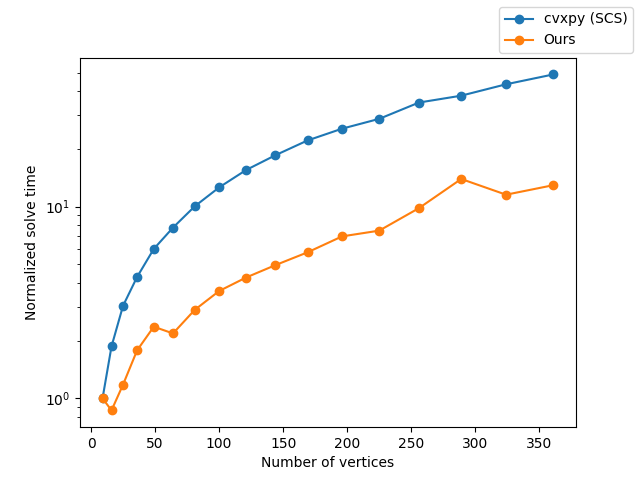
Runtime Per Iteration
\mathcal{O}(n(m^{3}+d^{3})/k)
Ours
- n vertices
- Each vertex has m edges
- Each set has dimension d
- With k processors
A GCS with
\mathcal{O}(n^{3}m^{3}d^{3})
Scs/Cosmo Solver
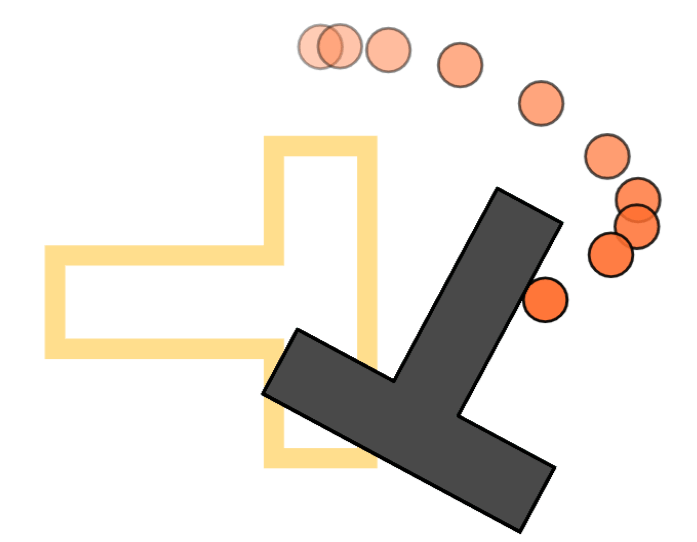
Early Results On Mazes of Increasing Sizes
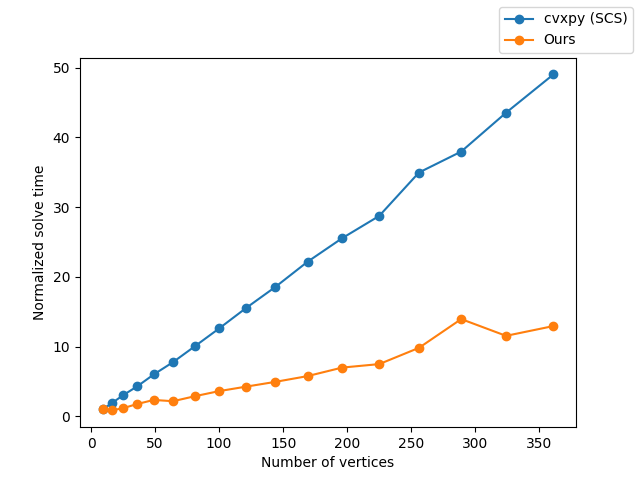
Early Results On Mazes of Increasing Sizes
Solver Coming Soon
With GPU results...
An Interior Point Based Solver For Gcs
Similar Lessons Carry Through from ADMM to Interior Point
More soon
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
Form Relaxation
The Structure of The Relaxation
The Structure of The Relaxation
\begin{gathered}
\min~& \text{tr}\left(C\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}\right)
\\
\text{subject to}~&
\left[
\begin{array}{ccc|c}
A_{v_{1}} && & -b_{v_{1}}\\
&\ddots& & \vdots\\
&&A_{v_{n}} & -b_{v_{n}}
\\
\hline
A_{e_{1}}^{u} & \dots & A_{e_{1}}^{v} & -b_{e_{1}} \\
\vdots & \ddots & \vdots & \vdots\\
\dots & A_{e_{m}}^{u} & A_{e_{m}}^{v} & -b_{e_{m}} \\
\hline
0 & \dots & 0 & 1
\end{array}
\right]
\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}
\begin{bmatrix}
A_{\mathcal{P}}^{T}\\
-b_{\mathcal{P}}^{T}
\end{bmatrix}
\in
\begin{bmatrix}
\mathcal{K}_{v_{1}} & \dots & \mathcal{K}_{v_{1}}
\\
\vdots & \ddots & \vdots
\\
\mathcal{K}_{v_{n}} & \dots & \mathcal{K}_{v_{n}}
\\
\hline
\mathcal{K}_{e_{1}}& \dots & 0
\\
\vdots & \ddots & \vdots
\\
0 & \dots & \mathcal{K}_{e_{m}}
\\
\hline
\mathbb{R}_{+} & \dots & \mathbb{R}_{+}
\end{bmatrix}
\end{gathered}
\begin{aligned}
\min~& \sum_{e \in \mathcal{E}}c_{e}^{T}(z_{e_{u}},z_{e_{v}}, y_{e}) \\
\text{subject to }&
A_{v}z_{v}-b_{v} y_{v} \in \mathcal{K}_{v} ~\forall v \in \mathcal{V}
\\
&
A_{e}(z_{e_{u}},z_{e_{v}}) - b_{e}y_{e} \in \mathcal{K}_{e} ~ \forall (u,v) \in \mathcal{E}
\\
&
A_{\mathcal{P}}y-b_{\mathcal{P}} \geq 0,~~ y\in \{0,1\}\
\end{aligned}
The Structure of The Relaxation
\begin{gathered}
\min~& \text{tr}\left(C\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}\right)
\\
\text{subject to}~&
\left[
\begin{array}{ccc|c}
A_{v_{1}} && & -b_{v_{1}}\\
&\ddots& & \vdots\\
&&A_{v_{n}} & -b_{v_{n}}
\\
\hline
A_{e_{1}}^{u} & \dots & A_{e_{1}}^{v} & -b_{e_{1}} \\
\vdots & \ddots & \vdots & \vdots\\
\dots & A_{e_{m}}^{u} & A_{e_{m}}^{v} & -b_{e_{m}} \\
\hline
0 & \dots & 0 & 1
\end{array}
\right]
\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}
\begin{bmatrix}
A_{\mathcal{P}}^{T}\\
-b_{\mathcal{P}}^{T}
\end{bmatrix}
\in
\begin{bmatrix}
\mathcal{K}_{v_{1}} & \dots & \mathcal{K}_{v_{1}}
\\
\vdots & \ddots & \vdots
\\
\mathcal{K}_{v_{n}} & \dots & \mathcal{K}_{v_{n}}
\\
\hline
\mathcal{K}_{e_{1}}& \dots & 0
\\
\vdots & \ddots & \vdots
\\
0 & \dots & \mathcal{K}_{e_{m}}
\\
\hline
\mathbb{R}_{+} & \dots & \mathbb{R}_{+}
\end{bmatrix}
\end{gathered}
\begin{gathered}
\min~& \text{tr}\left(C\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}\right)
\\
\text{subject to}~&
\left[
\begin{array}{c|c}
\text{block diagonal} & \text{dense}
\\
\hline
\text{block adjacency} & \text{vector} \\
\hline
0 & 1
\end{array}
\right]
\begin{bmatrix}
Z & X\\
y & 1
\end{bmatrix}
\begin{bmatrix}
\text{Shortest Path}
\\
\text{Problem}
\end{bmatrix}
\in
\begin{bmatrix}
\text{Vertex-wise}
\\
\text{cones}
\\
\hline
\text{Diagonal edge-wise}
\\
\text{cones}
\\
\hline
\mathbb{R}_{+}
\end{bmatrix}
\end{gathered}
The Structure of The Relaxation
Form Relaxation
Destroys Structure
\begin{aligned}
\min_{\lambda}~& g^{T}\lambda \\
\text{subject to }~& T\lambda - s \in \mathcal{K}
\end{aligned}
-
Flattens a sparse, matrix optimization into a vector optimization.
-
Vector optimization is denser, more irregularly patterned, and worse conditioned.
-
Vector optimization obfuscates the role of the graph vs the convex sets
Graph Of Convex Sets Final
By Alexandre Amice



