Fruit Detection and Classification Pipeline
ROB 460 Group - an AAU Robotic Perception Project
Meet the Team

Nikolaj Jensen

Christoffer Nielsen
Mads Dinesen
Aleksandra Dudlik
Alexandru Burlacu



This is how
we work
Live Demo
Now that I have your attention...
The Pipeline (High Level View)
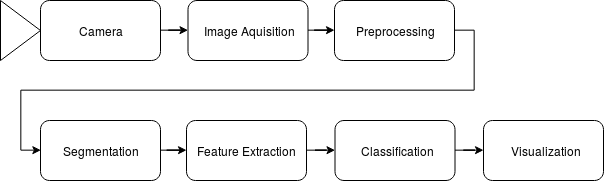
The Pipeline (High Level View)
- Image Aquisition with OpenCV
- Denosing using Non-local means
- Segmentation using HSV Color information
- Feature extraction using ORB descriptors (more on that in a moment)
- Classification using kNN matching
Non-local Means
... is an algorithm for image denoising. Unlike "local mean" filters, which take the mean value of a group of pixels surrounding a target pixel to smooth the image, non-local means filtering takes a mean of all pixels in the image, weighted by how similar these pixels are to the target pixel. This results in much greater post-filtering clarity, and less loss of detail in the image compared with local mean algorithms.
Hu Moments
1. An image moment is a certain particular weighted average of the image pixels' intensities, or a function of such moments, usually chosen to have some attractive property or interpretation.
2. Hu moments (there are 7 of them) are one such type of moments that are invariant to translation, scale, and rotation. They come in handy in classification, given some careful preprocessing of images.

Huuuu...
ORB descriptors
ORB (Oriented FAST and Rotated BRIEF) is a good alternative to SIFT and SURF in computation cost, matching performance and mainly the patents. Yes, SIFT and SURF are patented and you are supposed to pay them for its use. But ORB is not, Yay!!!
ORB is basically a fusion of FAST keypoint detector and BRIEF descriptor with many modifications to enhance the performance. First it use FAST to find keypoints, then apply Harris corner measure to find top N points among them. It also use pyramid to produce multiscale-features.
Thank you
Questions?
Please don't
AAU Robotic Perception Miniproject
By Alexandru Burlacu



