Embracing Noise in Neural Models
Accounting for replication noise in model selection
Alexandre René
rene@netsci.rwth-aachen.de
SSC annual meeting • Session on Noise in Neural Systems
1 Jun 2026 • Hamilton

Neural Models are always Misspecified
- We don’t know everything
- Even if we did, we don’t want to model everything
1,000 neurons of mouse brain © Allen institute
Fully mechanistic model
aka “bottom-up”
Effective model
Physics-inspired neural network (PINN)
Neural-network w/ interpretable dimensions
Black box
neural network
Interpretability
Flexibility of construction
Data requirements
Different Approaches to Dealing with Misspecificaton
Effective model
Neural-network w/ interpretable dimensions
Different Approaches to Dealing with Misspecificaton
Effective models

- Mechanistic model derived under assumption of homogeneous populations.
- Deterministic: \(A(t) = f_{\mathcal{M}_θ}\bigl(I(t); S_t\bigr)\)
- Probabilistic: \(A(t) \sim P\bigl(A(t) \mid I(t); \mathcal{M}_θ \bigr) \)
- Mechanistic equations provide a
model-informed loss functional: the log likelihood- Given observations \(\{I(t_i), A(t_i)\}_{i=1, 2, \dotsc}\), solve
- In contrast to e.g. least-squares, loss values away from minimum remain comparable
- A data-driven approach to effective models:
heterogeneous pops ⟼ homogeneous pops w/ effective params

(∞-pops)
(finite-pops)
pop activity
input
internal state
model
(René et al,, Neural Computations 2020)
\(i\) :
sample index
\hat{θ} = \argmin_θ - \sum_i \log P\bigl(A(t_i) \mid I(t_i); \mathcal{M}_θ \bigr)
more robust inference, better generalization
Different Approaches to Dealing with Misspecificaton
Effective models
- Mechanistic model: \(A(t) \sim P\bigl(A(t) \mid I(t); \mathcal{M}_θ \bigr) \)
- Model-informed loss functional: the log likelihood
- A data-driven approach to effective models:
heterogeneous pops ⟼ homogeneous pops w/ effective params
(finite-pops)
(René et al,, Neural Computations 2020)
\hat{θ} = \argmin_θ - \sum_i \log P\bigl(A(t_i) \mid I(t_i); \mathcal{M}_θ \bigr)
more robust inference, better generalization
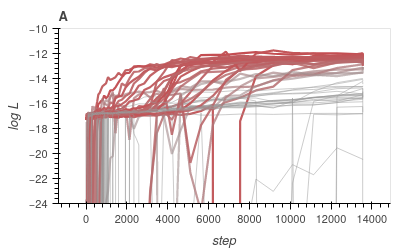
Highly nonlinear model ⇒ multitude of solutions

Different Approaches to Dealing with Misspecificaton
Neural networks with interpretable dimensions
(Bouss et al., PRX Life 2026)
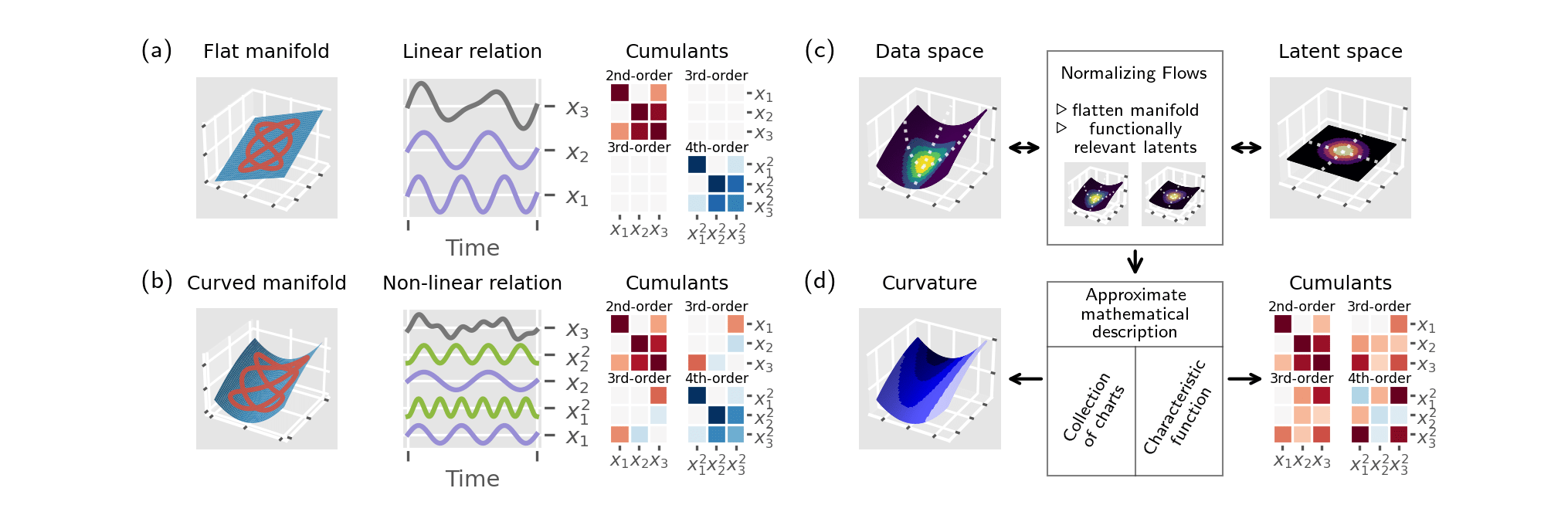
- If we don’t have a mechanistic model, we may still learn the data distribution.
- If we are very lucky, data may
- lie on a flat manifold
- and be Gaussian
\Biggr\}
then we can use PCA to learn the data distribution
Different Approaches to Dealing with Misspecificaton
Neural networks with interpretable dimensions
(Bouss et al., PRX Life 2026)
- If we don’t have a mechanistic model, we may still learn the data distribution.
- If we are very lucky, data may
- lie on a flat manifold
- and be Gaussian
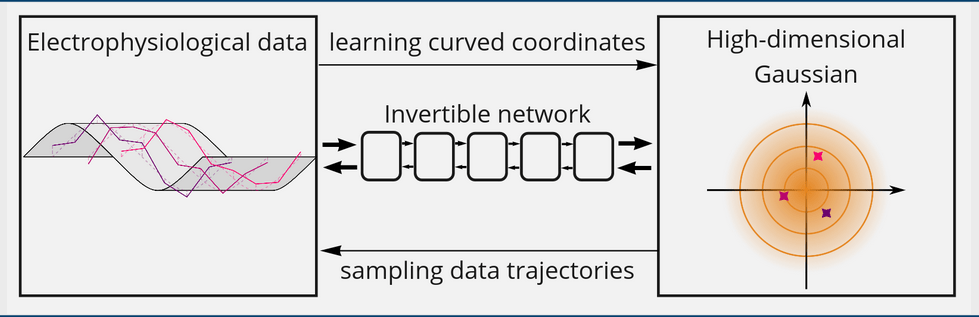
- An invertible neural network learns a diffeomorphism between the data dimensions and latent dimensions with a flat Gaussian
- This way it can learn non-parametric distributions on nonlinear manifolds
- Bijective map preserves interpretability of latent space.
\Biggr\}
then we can use PCA to learn the data distribution
Different Approaches to Dealing with Misspecificaton
Neural networks with interpretable dimensions
(Bouss et al., PRX Life 2026)
- If we don’t have a mechanistic model, we may still learn the data distribution.
- An invertible neural network (INN) learns a diffeomorphism between the data dimensions and latent dimensions
- ⇒ non-parametric distributions on nonlinear manifolds
- Bijective map preserves interpretability of latent space.
- We add a penalty to encourage a low-dimensional description
- If data > noise, this separate data and noise dimensions
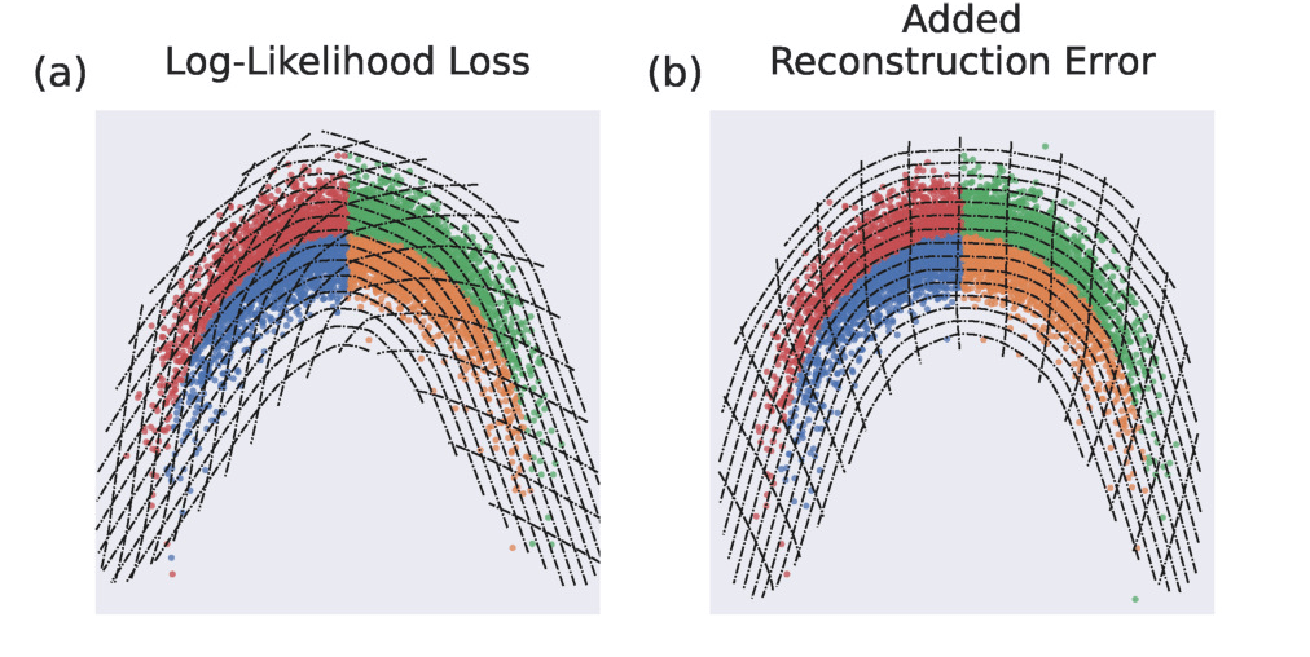
\mathcal{L}(θ) =
- \frac{1}{L} \frac{1}{|\mathcal{D}|} \sum_{y \in \mathcal{D}} \log \hat{p}_{|\mathcal{D},θ}(y)
+ γ \frac{1}{d_r} \sum_{l=1}^{d_r} R_l(θ)
log likelihood given by INN
Reconstruction accuracy keeping only \(l\) dimensions
→ lower dimensions show up in more terms
→ encourage low dimensions to be efficienc
Different Approaches to Dealing with Misspecificaton
Neural networks with interpretable dimensions
(Bouss et al., PRX Life 2026)
- If we don’t have a mechanistic model, we may still learn the data distribution.
- An invertible neural network (INN) learns a diffeomorphism between the data dimensions and latent dimensions
- ⇒ non-parametric distributions on nonlinear manifolds
- Bijective map preserves interpretability of latent space.
- We add a penalty to encourage a low-dimensional description
- If data > noise, this separate data and noise dimensions
- Applied to electrophysiological data (Utah array)
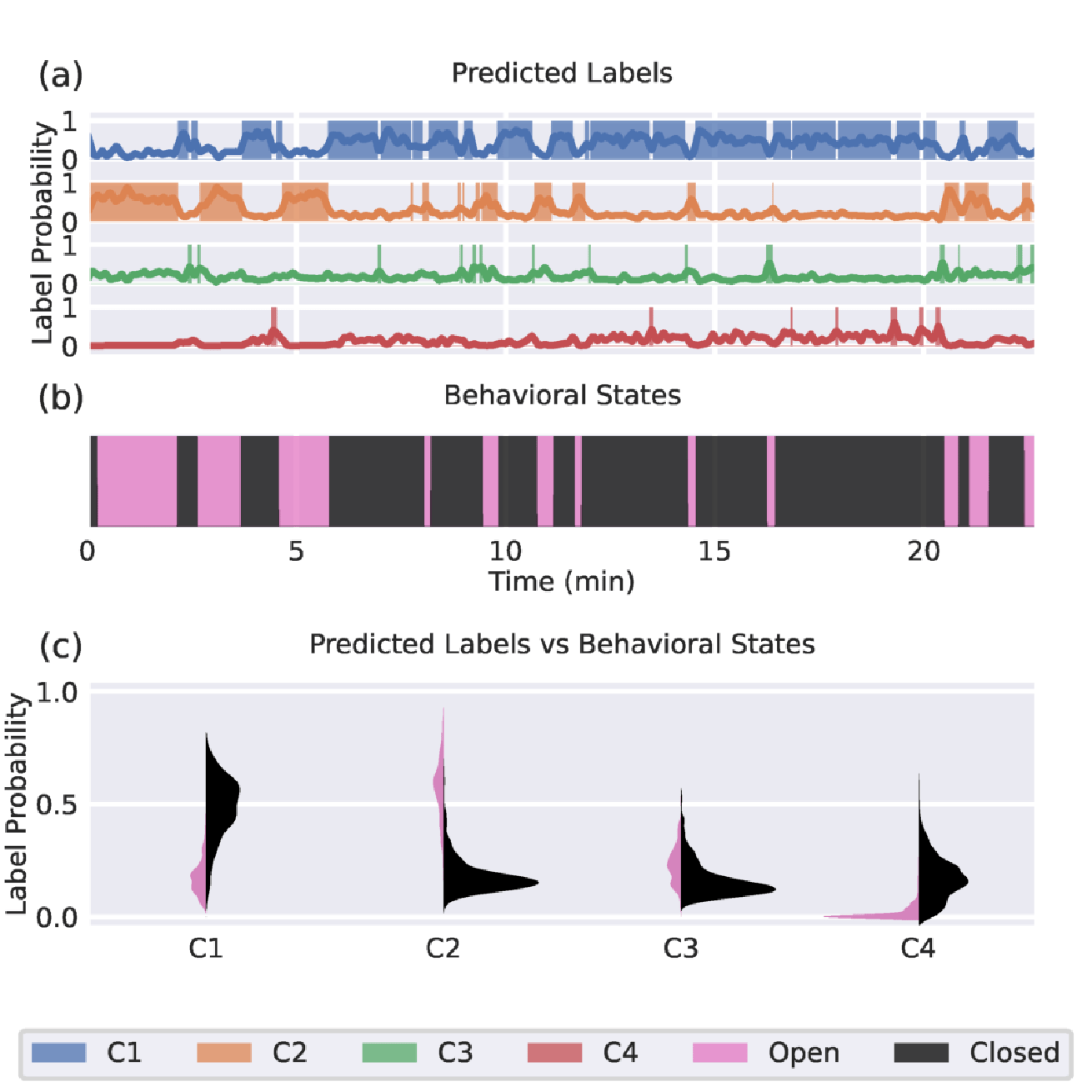
States
Latent component strongly correlated w/ state
Again, INN is a highly nonlinear model
⇒ multitude of solutions
Facing the Music
of Multiple Models

Usual scientific workflow
Anecdotal
observations
What we want in a Selection Criterion
Usual scientific workflow
Conceive theory
Conceive experiment
Accumulate data
Compare
Make prediction
New experiment?
Assumptions
Symmetry
Conservation
Exchangeability
Anecdotal
observations
Validate/falsify
- In science the goal is induction:
to find a general model from particular experiments - Scientific tradition has developed a way to do this:
evaluate predictions on replication experiments.
What we want in a Selection Criterion
Select the model which is “best” on replications.
Scientific wisdom:
Machine learning wisdom:
“best” → lowest (empirical) risk

Prinz et al., Nat Neurosci (2004)
René, Pyloric simulator, PyPI (2025)
C_a \frac{dV}{dt} = \;\;\sum_{\mathclap{\text{ion channels}}}\; \bar{g}_i m_i[V]^p h_i[V] (V - E_i)
\begin{aligned}
\mathcal{B}_{\mathrm{RJ}}(λ; T) &= \frac{2 c k_B T}{λ^4} \\
\mathcal{B}_\mathrm{P}(λ; T) &= \frac{2 h c^2}{λ^5} \frac{1}{\exp\left( \frac{hc}{λ k_B T} \right) - 1}
\end{aligned}
Two model examples
Radiance of a Black Body
Neurons of the Crustacean Pyloric Circuit
Fitting parameters
→ Distinct local solutions
- Two model candidates
- Models ↔
Different equations
Different parameters
- Two model candidates
- Models ↔
Same equations
Different parameters
Rayleigh-Jeans
Planck
Standard statistical criteria
EMD criterion

Prinz et al., Nat Neurosci (2004)
René, Pyloric simulator, PyPI (2025)
C_a \frac{dV}{dt} = \;\;\sum_{\mathclap{\text{ion channels}}}\; \bar{g}_i m_i[V]^p h_i[V] (V - E_i)
\begin{aligned}
\mathcal{B}_{\mathrm{RJ}}(λ; T) &= \frac{2 c k_B T}{λ^4} \\
\mathcal{B}_\mathrm{P}(λ; T) &= \frac{2 h c^2}{λ^5} \frac{1}{\exp\left( \frac{hc}{λ k_B T} \right) - 1}
\end{aligned}
Two model examples
Radiance of a Black Body
Neurons of the Crustacean Pyloric Circuit
- Two model candidates
- Models ↔
Different equations
Different parameters
- Two model candidates
- Models ↔
Same equations
Different parameters
Rayleigh-Jeans
Planck
\left\{\begin{aligned}
&\mathcal{M}_A \\
&\;\;\;\vdots \\
&\mathcal{M}_Z
\end{aligned}\right\}
\left\{\begin{aligned}
&\mathcal{M}_C \\
&\mathcal{M}_E \\
&\mathcal{M}_P
\end{aligned}\right\}
Goal
selection
criterion
- Only reject if enough evidence
⤷No forced choiced
We will use risk: \(\mathbb{E}_{\mathcal{M}_{\mathrm{true}}}[Q]\) to rank models
Some loss
\(θ_A\) subsumed into \(\mathcal{M}_A\)

The problem with Forced Choice
Data
Empirical Risk
Not all comparisons should be conclusive
Result is not consistent across replications
Intuition: More predictive accuracy ⇒ More reliable comparison
Why? If we know a source of variable, we can:
- account for it in the model
- control for it in the experiment
EMD assumption: Model discrepancies are due to unknown variability
Unknown sources of variability may change across experiments

- Empirical risk accounts for predictive performance and non-stationary replications (aka generalization)
(“consistency”) - But still a forced choice: no notion of uncertainty
- We are going to construct a criterion which bootstraps epistemic uncertainty from prediction discrepancies:
Empirical Modelling Discrepancy (EMD)
Ranking models based on empirical risk
\(R\): Risk
(lower is better)
Are these differences in risk all meaningful?
Data
Pointwise loss
(Empirical) risk
\((x_i, y_i) \sim \mathcal{D}_{\mathrm{true}} \)
\(Q(x_i, y_i \mid \mathcal{M}_A) \to \mathbb{R}\)
\(\mathbb{E}\bigl[Q(x_i, y_i \mid \mathcal{M}_A) \bigr] \approx \frac{1}{L} \;\sum\limits_{\mathclap{\qquad(x_i, y_i) \sim \mathcal{D}_{\mathrm{true}}}}\;\; Q(x_i, y_i \mid \mathcal{M}_A) \)
NB: \(θ\) subsumed into \(\mathcal{M}_a\)
We assume to have
- \(\bigl\{\mathcal{M}_A, \mathcal{M}_B, \dotsc \bigr\}\)
each defining \(p(x_i, y_i \mid \mathcal{M}_a) \) - \(Q: \mathcal{X} \times \mathcal{Y} \to \mathbb{R} \)
- ability to sample \(\mathcal{M}_{\mathrm{true}}\)
- Empirical risk accounts for predictive performance and non-stationary replications (aka generalization)
(“consistency”) - But still a forced choice: no notion of uncertainty
- We are going to construct a criterion which bootstraps epistemic uncertainty from prediction discrepancies:
Empirical Modelling Discrepancy (EMD)
Ranking models based on empirical risk
\(R\): Risk
(lower is better)
Are these differences in risk all meaningful?
Data
Pointwise loss
(Empirical) risk
\((x_i, y_i) \sim \mathcal{D}_{\mathrm{true}} \)
\(Q(x_i, y_i \mid \mathcal{M}_A) \to \mathbb{R}\)
\(\mathbb{E}\bigl[Q(x_i, y_i \mid \mathcal{M}_A) \bigr] \approx \frac{1}{L} \;\sum\limits_{\mathclap{\qquad(x_i, y_i) \sim \mathcal{D}_{\mathrm{true}}}}\;\; Q(x_i, y_i \mid \mathcal{M}_A) \)
NB: \(θ\) subsumed into \(\mathcal{M}_a\)
We assume to have
- \(\bigl\{\mathcal{M}_A, \mathcal{M}_B, \dotsc \bigr\}\)
each defining \(p(x_i, y_i \mid \mathcal{M}_a) \) - \(Q: \mathcal{X} \times \mathcal{Y} \to \mathbb{R} \)
- ability to sample \(\mathcal{M}_{\mathrm{true}}\)
How do we measure this?
And turn it into this?
Discrepancy
Model ↔ Quantile Function

For purposes of calculating risk, we can reduce any model to \(q(Φ)\) without loss of information
\begin{aligned}
R_A &:= \mathbb{E}_{\mathcal{M}_\mathrm{true}}\bigl[Q(x_i, y_i \mid \mathcal{M}_A) \bigr] \\
&\;= \int_{\mathcal{X}\times\mathcal{Y}}
\hspace{-18mu} dxdy\, p(x,y \mid \mathcal{M}_{\mathrm{true}}) \; Q(x, y \mid \mathcal{M}_A) \\
&\;= \int_{-\infty}^\infty \hspace{-12mu} dq
\int_{\substack{\\\!\!\!\!\!\mathcal{X}\times\mathcal{Y}\\\!\!\!Q(x,y)=q}}
\hspace{-32mu} dxdy\,p(x,y \mid \mathcal{M}_{\mathrm{true}}) \; Q(x, y \mid \mathcal{M}_A) \\
&\;= \int_{-\infty}^\infty \hspace{-6mu} dq \;q\; p(q \mid \mathcal{M}_\mathrm{true}, \mathcal{M}_A) \\
&\;= \int_{-\infty}^\infty \hspace{-6mu} dq \;q(Φ \mid \mathcal{M}_\mathrm{true}, \mathcal{M}_A) \frac{d}{dq} Φ \\
R_A &\;= \int_{0}^{1} q(Φ\mid \mathcal{M}_\mathrm{true}, \mathcal{M}_A) dΦ
\end{aligned}
\begin{aligned}
\vphantom{Φ(q \mid \mathcal{M}_{\mathrm{true}}, \mathcal{M}_A)}
Φ(q \mid \dots)
&= \int_{\substack{\\\!\!\!\!\!\mathcal{X}\times\mathcal{Y}\\\!\!\!Q(x,y){\color{blue} \bm{\leq}} q}}
\hspace{-32mu} dxdy\; Q(x, y \mid \mathcal{M}_A) p(x,y \mid \mathcal{M}_{\mathrm{true}}) \\[5ex]
&\approx \frac{1}{\lvert \mathcal{D} \rvert} \sum_{\mathcal{D}} \bigl[ Q(x,y) \leq q \bigr]
\end{aligned}
R_A \;= \int_{0}^{1} q(Φ \mid \mathcal{M}_\mathrm{true}, \mathcal{M}_A) dΦ \quad {\color{grey} \approx \frac{1}{\lvert \mathcal{D} \rvert} \sum_{(x,y)\in\mathcal{D}} Q(x,y \mid \mathcal{M}_A)}
tldr: Use Fubini’s theorem to rewrite risk integral
Model ↔ Quantile Function
For purposes of calculating risk, we can reduce any model to \(q(Φ)\) without loss of information
EMD assumption (reframed): Candidate models represent that part of the experiment which we understand and control across replications
We can estimate \(R_A\) in two different ways:
\tilde{R}_A = \int_{\mathcal{X}\times\mathcal{Y}}
\hspace{-18mu} dxdy\; Q(x, y \mid {\color{blue} \mathcal{M}_A}) p(x,y \mid {\color{blue} \mathcal{M}_A}) \\
R_A^* = \int_{\mathcal{X}\times\mathcal{Y}}
\hspace{-18mu} dxdy\; Q(x, y \mid {\color{blue} \mathcal{M}_A}) p(x,y \mid {\color{blue} \mathcal{M}_{\mathrm{true}}}) \\
Mixed \(q_A^*\)
Synth \(\tilde{q}_A\)
Repeat for each \(\mathcal{M}\)
Stochastic Processes on Quantile Functions
Desiderata
Any process \(\mathcal{Q}\) should be
- monotone
- integrable
- non-accumulating
\mathbb{E}\bigl[ \lvert q(Φ + ΔΦ) - q(Φ) \rvert \bigr] \lesssim C \, ΔΦ
There is no way to coax a Wiener process to yield what we need

Variance must not depend on \(Φ\), only on \(δ^{\mathrm{EMD}}(Φ)\)
- \(\hat{q}\) should be “centered” on \(q^*\)
- The “variability” of \(\hat{q}\) should be proportional to \(\color{#FF7b00} δ^{\mathrm{EMD}}\)
\begin{aligned}
&\tilde{q}(Φ+ΔΦ) \\
&\quad= \tilde{q}(Φ) + \mathcal{N}\bigl[q^*(Φ+ΔΦ) - q^*(Φ), c(δ^{\mathrm{EMD}})^2\bigr]
\end{aligned}
Hierarchical Beta Process on Quantile Functions
Instead of accumulating increments left-to-right, we successively refine the interval
We draw increment pairs, under the constraint
\(Δq_{ΔΦ}(Φ) \stackrel{!}{=} Δq_{ΔΦ/2}(Φ) + Δq_{ΔΦ/2}(Φ+ΔΦ/2)\)
\Rightarrow
We need a compositional distribution
Mateu-Figueras et al., Distributions on the Simplex Revisited, 2021
The simplest 2-D compositional distributon is the beta distribution
\begin{aligned}
&\tilde{q}(Φ+ΔΦ) \\
&\quad= \tilde{q}(Φ) + \mathcal{N}\bigl[q^*(Φ+ΔΦ) - q^*(Φ), c(δ^{\mathrm{EMD}})^2\bigr]
\end{aligned}

Φ
ΔΦ = 2^{-1}
Φ
ΔΦ = 2^{-2}
Φ
ΔΦ = 2^{-3}
q
Φ
q
Φ
ΔΦ = 2^0
Hierarchical Beta Process on Quantile Functions
We draw increment pairs, under the constraint
\(Δq_{ΔΦ}(Φ) \stackrel{!}{=} Δq_{ΔΦ/2}(Φ) + Δq_{ΔΦ/2}(Φ+ΔΦ/2)\)
Φ
q
Φ
Beta
\begin{alignedat}{7}
x &\sim \mathop{\mathrm{Beta}} &&\Rightarrow\; & p(x) &\propto x^α (1 - x)^β &&\,,& \quad x &\in [0, 1] \\
\phantom{x_1, x_2}&\phantom{\sim \mathop{\mathrm{Beta}}} &&\phantom{\Rightarrow\;} & \phantom{p(x_1,x_2)} &\phantom{\propto x_1^α\;\; x_2^β} &&\phantom{\,,}& \phantom{\quad x_1,x_2} &\phantom{\in [0, 1], \, x_1 + x_2 \stackrel{!}{=} 1}
\end{alignedat}
Compositional form
Desiderata
- monotone
- integrable
- non-accumulating
\left.\begin{aligned}
\\[4ex]
\end{aligned}\right\}
By construction
- \(\hat{q}\) should be “centered” on \(q^*\)
\left.\begin{aligned}
\\[4ex]
\end{aligned}\right\}
Determine \(α\) and \(β\)
\begin{alignedat}{7}
\phantom{x} &\phantom{\sim \mathop{\mathrm{Beta}}} &&\phantom{\Rightarrow\;} & \phantom{p(x)} &\phantom{\propto x^α (1 - x)^β} &&\,\phantom{,}& \quad \phantom{x} &\phantom{\in [0, 1]} \\
x_1, x_2&\sim \mathop{\mathrm{Beta}} &&\Rightarrow\; & p(x_1,x_2) &\propto x_1^α\;\; x_2^β &&\,,& \quad x_1,x_2 &\in [0, 1], \, x_1 + x_2 \stackrel{!}{=} 1
\end{alignedat}
- The “variability” of \(\hat{q}\) should be proportional to \(\color{#FF7b00} δ^{\mathrm{EMD}}\)
Hierarchical Beta Process on Quantile Functions
We draw increment pairs, under the constraint
\(Δq_{ΔΦ}(Φ) \stackrel{!}{=} Δq_{ΔΦ/2}(Φ) + Δq_{ΔΦ/2}(Φ+ΔΦ/2)\)
Φ
q
Φ
Beta
\begin{alignedat}{7}
\phantom{x} &\phantom{\sim \mathop{\mathrm{Beta}}} &&\phantom{\Rightarrow\;} & \phantom{p(x)} &\phantom{\propto x^α (1 - x)^β} &&\,\phantom{,}& \quad \phantom{x} &\phantom{\in [0, 1]} \\
x_1, x_2&\sim \mathop{\mathrm{Beta}} &&\Rightarrow\; & p(x_1,x_2) &\propto x_1^α\;\; x_2^β &&\,,& \quad x_1,x_2 &\in [0, 1], \, x_1 + x_2 \stackrel{!}{=} 1
\end{alignedat}
- \(\hat{q}\) should be “centered” on \(q^*\)
- The “variability” of \(\hat{q}\) should be proportional to \(\color{#FF7b00} δ^{\mathrm{EMD}}\)
Because of the constraint, mean and variance are not natural statistics for compositional distributions
Mateu-Figueras et al., Distributions on the Simplex Revisited, 2021
Instead it is better to use the center and metric variance
\mathbb{E}_a[(x_1, x_2)] = \frac{1}{e^{ψ(α)} + e^{ψ(β)}} \bigl(e^{ψ(α)}, e^{ψ(β)}\bigr)
\mathop{\mathrm{Mvar}}[(x_1, x_2)] = \frac{1}{2} \bigl(ψ_1(α) + ψ_1(β)\bigr)
Two equations ⇒ Solve for \(α\) and \(β\)
\frac{e^{ψ(α)}}{e^{ψ(β)}} \stackrel{!}{=} \frac{Δq_{ΔΦ}^*(Φ)}{Δq_{ΔΦ}^*(Φ+ΔΦ)}
\mathop{\mathrm{Mvar}}[(x_1, x_2)] \stackrel{!}{=} c\,δ^\mathrm{EMD}
Summary – Ideas
Φ
R_A \;= \mathbb{E}_{\mathcal{M}_\mathrm{true}}\bigl[Q(x_i, y_i \mid \mathcal{M}_A) = \int_{0}^{1} dΦ(q \mid \mathcal{M}_\mathrm{true}, \mathcal{M}_A)
Better noise produces better models
→
There is a cost to over-simplifying noise, eg. w/ least squares
Summary – Procedure
Repeat for each \(\mathcal{M}\)
Calibration
Summary – Procedure
Repeat for each \(\mathcal{M}\)
Calibration
All of this can be automated
emdcmp on PyPI
from emdcmp import Bemd, make_empirical_risk, draw_R_samples
synth_ppfA = make_empirical_risk(lossA(modelA.generate(Lsynth)))
synth_ppfB = make_empirical_risk(lossB(modelB.generate(Lsynth)))
mixed_ppfA = make_empirical_risk(lossA(data))
mixed_ppfB = make_empirical_risk(lossB(data))
Bemd(mixed_ppfA, mixed_ppfB, synth_ppfA, synth_ppfB, c=c)
Thank You
Chair of Computational Network Science
(Prof. Michael Schaub)

netsci.rwth-aachen.de
Alexandre René
rene@netsci.rwth-aachen.de
www.arene.ca
Learning effective models
Cited papers
René, Longtin, Macke, Inference of a Mesoscopic Population Model from Population Spike Trains, Neural Computation (2020)
Learning invertible neural network
René, Longtin, Macke, Characterizing Neural Manifolds' Properties and Curvatures using Normalizing Flows, PRX Life (2026)
Epistemically-robust model selection
René, Longtin, Selecting fitted models under epistemic uncertainty using a stochastic process on quantile functions, Nature Communications (2025)
Extra slides
We can learn more, and more complex, models


Multiple LP candidates with similar responses
Prinz et al., Nat Neurosci (2004)
René, pyloric simulator, PyPI (2025)
C_a \frac{dV}{dt} = \;\;\sum_{\mathclap{\text{ion channels}}}\; \bar{g}_i m_i[V]^p h_i[V] (V - E_i)
8D Parameter sweep
… arguably too many models

t_k
t_{k-1}
t_{k-2}
…
\nabla_{\color{#3cb100} Θ}

René et al., Neural Comp (2020)
Back-propagation through time

Hierarchical Beta Process on Quantile Functions
q
Φ
A Qualitatively Different Criterion


Dataset size
“Strength” of evidence
BIC
Bayes factor
MDL
AIC
elpd
- No
- Partially —
vol(posterior) - No
- No
- No
- No
- Yes —
vol(posterior) - No
- No
- No
- No
- Yes — ability to fit arb. data
- No
- No
- No
- Partially — unbiased est.
-
No
- No
- No
- No
-
Yes
-
No
- No
- No
- No
EMD
- High-level goal is induction
- Objective is predictive accuracy
- No model is perfect
- The amount of data is undetermined
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(\lvert\mathcal{D}\rvert \to \infty\))
-
Yes
-
No
- No
- No
- No

Calibration: Putting units on the proportionality
\bm{ δ^\mathrm{EMD} }
\mathop{\mathrm{Mvar}}[(x_1, x_2)] \stackrel{!}{=} {\color{1692ad} c} \,δ^\mathrm{EMD}
- Converts discrepancy to metric variance
- Context-dependent: chosen by
simulating experimental variations
Procedure
- Use domain & problem knowledge to define “epistemic distributions” \(Ω\) over
- weak vs strong input
- data correlations
- temperature
- …
- Simulate 1000’s of model comparisons for each tested value of \(c\)
- Compare to the ground truth probabilities
- Select a \(c\) which systematically underestimates selection confidence
B^\mathrm{EMD}_{AB} := P(R_A < R_B \mid c)
Use the fact that \(B^\mathrm{EMD}_{AB}\) are true probabilities:
B^\mathrm{epis}
Calibration: Putting units on the proportionality
\bm{ δ^\mathrm{EMD} }
Procedure
- Use domain & problem knowledge to define “epistemic distributions” \(Ω\) over
- weak vs strong input
- data correlations
- temperature
- …
- Simulate 1000’s of model comparisons for each tested value of \(c\)
- Compare to the ground truth probabilities
- Select a \(c\) which systematically underestimates selection confidence
B^\mathrm{EMD}_{AB} := P(R_A < R_B \mid c)
Use the fact that \(B^\mathrm{EMD}_{AB}\) are true probabilities:
(white region)
B^\mathrm{epis}
(true)
(theory)
What kind of robustness do we seek?
Variations
At a large scale, what kinds of variations do we want to account for?
- In-distribution data
- Out-of-distribution data
- Model parameters
High-level
Paradigm
How do we define/quantify these variations and the selection objective?
Specific
- Epistemic distribution (\(Ω\))
- Data-generating process (\(\mathcal{M}_{\mathrm{true}}\))
- Dataset (\(\mathcal{D}\))
- Parameters (\(θ\))
- Score function (\(R\))
- Evaluate score on…
Properties
Higher-level assessment.
These follow from the choice of paradigm.
Functional
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
Different criteria ↔ Different notions of robustness
Variations
Paradigm
Properties
- In-distribution data
- Out-of-distribution data
- Model parameters
- Epistemic distribution (\(Ω\))
- Data-generating process (\(\mathcal{M}_{\mathrm{true}}\))
- Dataset (\(\mathcal{D}\))
- Parameters (\(θ\))
- Score function (\(R\))
- Evaluate score on…
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
BIC
Bayes factor
ε_A = \int p(\mathcal{D}|θ,\mathcal{M}_A){\color{blue} π_A(θ) dθ}
MDL
AIC
elpd
\mathtt{COMP}(\mathcal{M}_A) = \int {\color{blue} \max_θ}\; p({\color{red} \mathcal{D}'}|\mathcal{M}_A({\color{blue} θ})) d{\color{red} D'}
\mathbb{E}_{{\color{blue} (x_i, y_i)} \sim \mathcal{M}_{\mathrm{true}}} [Q({\color{blue} x_i, y_i}; \mathcal{M}_A)]
2 Q({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)) + k_A \cdot 2
2 Q\bigl({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)\bigr) + k_A \lvert\mathcal{D}\rvert
Bayesian information criterion
aka model evidence
minimum description length
Akaike information criterion
expected log pointwise predictive density
\log ε_A - \log ε_B
p\bigl(\mathcal{D} \mid \mathcal{M}_A\bigl({\color{green} \hat{θ}}(\mathcal{D}_{\mathrm{train}})\bigr)\bigr)
Ignoring
model
vs
discrete params
vs
continuous params
See esp. “Holes in Bayesian Statistics”, Gelman, Yao, J. Phys. G (2020)
Different criteria ↔ Different notions of robustness
Variations
Paradigm
Properties
- In-distribution data
- Out-of-distribution data
- Model parameters
- Epistemic distribution (\(Ω\))
- Data-generating process (\(\mathcal{M}_{\mathrm{true}}\))
- Dataset (\(\mathcal{D}\))
- Parameters (\(θ\))
- Score function (\(R\))
- Evaluate score on…
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
BIC
Bayes factor
ε_A = \int p(\mathcal{D}|θ,\mathcal{M}_A)π_A(θ) dθ
MDL
AIC
elpd
- No
- No
- Yes
- N/A
- N/A
- Fixed \(\mathcal{D}_{\mathrm{rep}} \equiv \mathcal{D}_{\mathrm{obs}}\)
- (\(θ\sim \text{prior}\))
- Log likelihood
- Training data, joint
- No
- No
- Yes
- N/A
- N/A
- Fixed \(\mathcal{D}_{\mathrm{rep}} \equiv \mathcal{D}_{\mathrm{obs}}\)
- (\(θ\sim \text{prior}\))
- Log likelihood
- Training data, joint
- No
- Yes
- Yes
- Single \(Ω\):
- \(\mathcal{M}_{\mathrm{true}} \sim Ω\)
- \(\mathcal{D}_{\mathrm{rep}} \sim\) event space
- Fit \(θ\) to \(\mathcal{D}_{\mathrm{rep}} \)
- Log likelihood
- Training data, joint
- Yes
- No
- No
- N/A
- Fixed \(\mathcal{M}_{\mathrm{true}}\)
- \(\mathcal{D}_{\mathrm{rep}} \sim \mathcal{M}_{\mathrm{true}}\)
- Fit \(θ\) to \(\mathcal{D}_{\mathrm{rep}} \)
- Log likelihood
- Training data, joint
- Yes
- Yes
- No
- Single \(Ω\):
- \(\mathcal{M}_{\mathrm{true}} \sim Ω\)
- \(\mathcal{D}_{\mathrm{rep}} \sim \mathcal{M}_{\mathrm{true}}\)
- Fit posterior to \(\mathcal{D}_{\mathrm{obs}} \)
- Arbitrary functional
- Test data, pointwise total
prior over models
prior over models
posterior over params
\int {\color{blue} \max_θ}\; p({\color{red} \mathcal{D}'}|\mathcal{M}_A({\color{blue} θ})) d{\color{red} D'}
\mathbb{E}_{{\color{blue} (x_i, y_i)} \sim \mathcal{M}_{\mathrm{true}}} [Q({\color{blue} x_i, y_i}; \mathcal{M}_A)]
2 Q({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)) + 2k_A
2 Q\bigl({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)\bigr) + k_A \lvert\mathcal{D}\rvert
Different criteria ↔ Different notions of robustness
Variations
Paradigm
Properties
- In-distribution data
- Out-of-distribution data
- Model parameters
- Epistemic distribution (\(Ω\))
- Data-generating process (\(\mathcal{M}_{\mathrm{true}}\))
- Dataset (\(\mathcal{D}\))
- Parameters (\(θ\))
- Score function (\(R\))
- Evaluate score on…
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
BIC
Bayes factor
ε_A = \int p(\mathcal{D}|θ,\mathcal{M}_A)π_A(θ) dθ
MDL
AIC
elpd
- No
- Partially —
vol(posterior) - No
- No
- No
- No
- Yes —
vol(posterior) - No
- No
- No
- No
- Yes — ability to fit arb. data
- No
- No
- No
- Partially — unbiased est.
-
No
- No
- No
- No
-
Yes
-
No
- No
- No
- No
\int {\color{blue} \max_θ}\; p({\color{red} \mathcal{D}'}|\mathcal{M}_A({\color{blue} θ})) d{\color{red} D'}
\mathbb{E}_{{\color{blue} (x_i, y_i)} \sim \mathcal{M}_{\mathrm{true}}} [Q({\color{blue} x_i, y_i}; \mathcal{M}_A)]
2 Q({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)) + 2k_A
2 Q\bigl({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)\bigr) + k_A \lvert\mathcal{D}\rvert
Different criteria ↔ Different notions of robustness
Variations
Paradigm
Properties
- In-distribution data
- Out-of-distribution data
- Model parameters
- Epistemic distribution (\(Ω\))
- Data-generating process (\(\mathcal{M}_{\mathrm{true}}\))
- Dataset (\(\mathcal{D}\))
- Parameters (\(θ\))
- Score function (\(R\))
- Evaluate score on…
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
BIC
Bayes factor
ε_A = \int p(\mathcal{D}|θ,\mathcal{M}_A)π_A(θ) dθ
MDL
AIC
elpd
- No
- Partially —
vol(posterior) - No
- No
- No
- No
- Yes —
vol(posterior) - No
- No
- No
- No
- Yes — ability to fit arb. data
- No
- No
- No
- Partially — unbiased est.
-
No
- No
- No
- No
-
Yes
-
No
- No
- No
- No
\int {\color{blue} \max_θ}\; p({\color{red} \mathcal{D}'}|\mathcal{M}_A({\color{blue} θ})) d{\color{red} D'}
\mathbb{E}_{{\color{blue} (x_i, y_i)} \sim \mathcal{M}_{\mathrm{true}}} [Q({\color{blue} x_i, y_i}; \mathcal{M}_A)]
2 Q({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)) + 2k_A
2 Q\bigl({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)\bigr) + k_A \lvert\mathcal{D}\rvert
Key take-away:
- No universal selection rule
- No substitute to think about what we have, and what we need
- So what do we need?
Statistical Criteria are not meant for Induction
BIC
Bayes factor
ε_A = \int p(\mathcal{D}|θ,\mathcal{M}_A)π_A(θ) dθ
MDL
AIC
elpd
- No
- Partially —
vol(posterior) - No
- No
- No
- No
- Yes —
vol(posterior) - No
- No
- No
- No
- Yes — ability to fit arb. data
- No
- No
- No
- Partially — unbiased est.
-
No
- No
- No
- No
-
Yes
-
No
- No
- No
- No
\int {\color{blue} \max_θ}\; p({\color{red} \mathcal{D}'}|\mathcal{M}_A({\color{blue} θ})) d{\color{red} D'}
\mathbb{E}_{{\color{blue} (x_i, y_i)} \sim \mathcal{M}_{\mathrm{true}}} [Q({\color{blue} x_i, y_i}; \mathcal{M}_A)]
2 Q({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)) + 2k_A
2 Q\bigl({\color{red} \mathcal{D}_{\mathrm{train}}}; \mathcal{M}_A\bigl({\color{green} \hat{θ}}({\color{red} \mathcal{D}_{\mathrm{train}}})\bigr)\bigr) + k_A \lvert\mathcal{D}\rvert
- Abstract goal is induction
- Objective is predictive accuracy
- No model is perfect
- The amount of data is undetermined
Properties
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
Statistical Criteria are not meant for Induction
Properties
- Considers generalization error
- Penalizes model complexity
- Allows for misspecified models
- Allows for non-stationary replications
- Bounded discriminability (as \(L \to \infty\))
- Abstract goal is induction
- Objective is predictive accuracy
- No model is perfect
- The amount of data is undetermined
Dataset size
“Strength” of evidence
Would you confidently select the Planck model based on these data?
Why not?
And yet…
Statistical criteria are descriptive
They consider only the data we have today, not those we will collect tomorrow
Copy of Truth in the Age of Deep Learning
By Alexandre René
Copy of Truth in the Age of Deep Learning
This was presented at the D-IEP seminar on 6 Nov 2025




