Alireza Afzal Aghaei
Graduate student at SBU
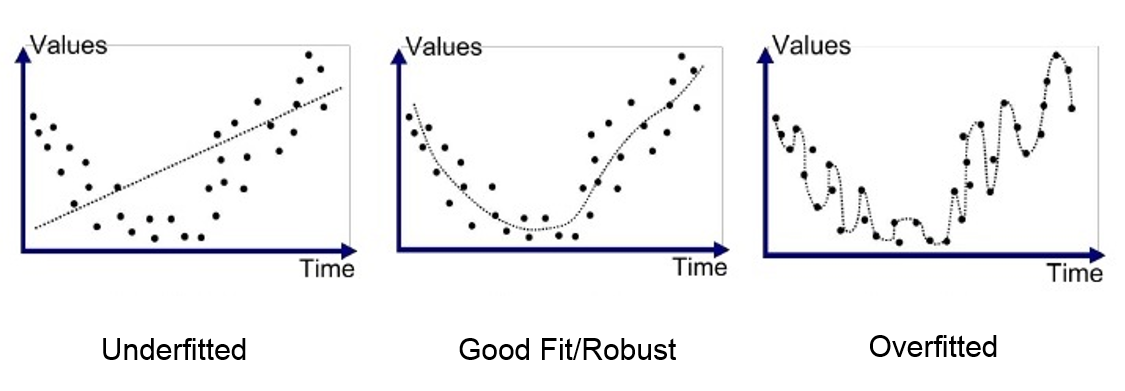
$$MSE_{train} = 0, \quad MSE_{test} \gg 0$$
Theorem. Given a set of \(k + 1\) distinct data points
$$(x_{0},y_{0}),\ldots ,(x_{j},y_{j}),\ldots ,(x_{k},y_{k})$$
The Lagrange interpolation is defined as
$$L(x):=\sum _{j=0}^{k}y_{j}\ell _{j}(x)$$
where Lagrange Polynomials for \(0\leq j\leq k\) have the property:
$${\displaystyle \ell _{j}(x_{i})=\delta _{ji}={\begin{cases}1,&{\text{if }}j=i\\0,&{\text{if }}j\neq i\end{cases}},}$$
It can be seen that the Lagrange Polynomials for \(0\leq j\leq k\) can be defined as:
$$\begin{aligned} \ell _{j}(x)&:=\prod _{\begin{smallmatrix}0\leq m\leq k\\m\neq j\end{smallmatrix}}{\frac {x-x_{m}}{x_{j}-x_{m}}}\\&={\frac {(x-x_{0})}{(x_{j}-x_{0})}}\cdots {\frac {(x-x_{j-1})}{(x_{j}-x_{j-1})}}{\frac {(x-x_{j+1})}{(x_{j}-x_{j+1})}}\cdots {\frac {(x-x_{k})}{(x_{j}-x_{k})}}\end{aligned}$$
The Lagrange Polynomials for \(0\leq j\leq k\) can be defined as:
$$\ell^\phi _{j}(x):=\prod _{\begin{smallmatrix}0\leq m\leq k\\m\neq j\end{smallmatrix}}{\frac {\phi(x)-\phi(x_{m})}{\phi(x_{j})-\phi(x_{m})}}$$
where \(\phi\) is an arbitrary smooth function and sufficiently differentiable.
With different choices of \(\phi(x)\), many new basis functions can be generated at different intervals:
Classic Polynomial \(\phi(x)=x\)
Fractional Lagrange functions \(\phi(x) = x^\delta\)
Exponential Lagrange functions \(\phi(x) = e^x\)
Rational Lagrange functions \(\phi(x) = \frac{x+L}{x-L}\)
Fourier Lagrange functions \(\phi(x) = sin(x)\)
By Alireza Afzal Aghaei




