Old and well-studied alternative to the Maximum Likelihood Estimation approach
Moment function: \[ m(\theta) = \mathbb{E}_{p_\theta(x)} \Phi(x) \] where \( \Phi(x) \in \mathbb{R}^D \) -- some feature extractor
Let \( \hat\theta_N \) be s.t. \[ m(\hat\theta_N) = \frac{1}{N} \sum_{n=1}^N \Phi(x_n) \]
If \( p_\text{data}(x) = p_{\theta^\star}(x) \) for some \(\theta^\star\), then this estimator is consistent
Asymptotic Normality
Theorem: if \( m(\theta) \) is a one-to-one mapping, and is continuously differentiable at \(\hat\theta_N\) with non-singular derivative \(\nabla_\theta \mathbb{E}_{p_\theta(x)} \Phi(x)\), assuming \(\mathbb{E}_{p_\theta(x)} \|\Phi(x)\|^2 < \infty\), \( \hat\theta_N \) exists with probability tending to 1, and satisfies \[ \sqrt{N}(\hat\theta_N - \theta^\star) \to \mathcal{N}\left(0, G^{-1} \Sigma G^{-T}\right), \quad\quad \Sigma = \text{Cov}_{p_\text{data}(x)} \; \Phi(x) \]
Implications: some \( \Phi \) are better than others due to lower variance, and thus lower sample complexity
Invertibility is too restrictive, can be relaxed to identifiability: \( m(\theta) = \mathbb{E}_{p_\text{data}(x)} \Phi(x)\) iff \(\theta = \theta^*\)
Still hard to verify, instead assume \(G\) is full rank, and there are more moments than model parameters
Moment Networks
It's hard to generate more moments than number of parameters in \(\theta\)
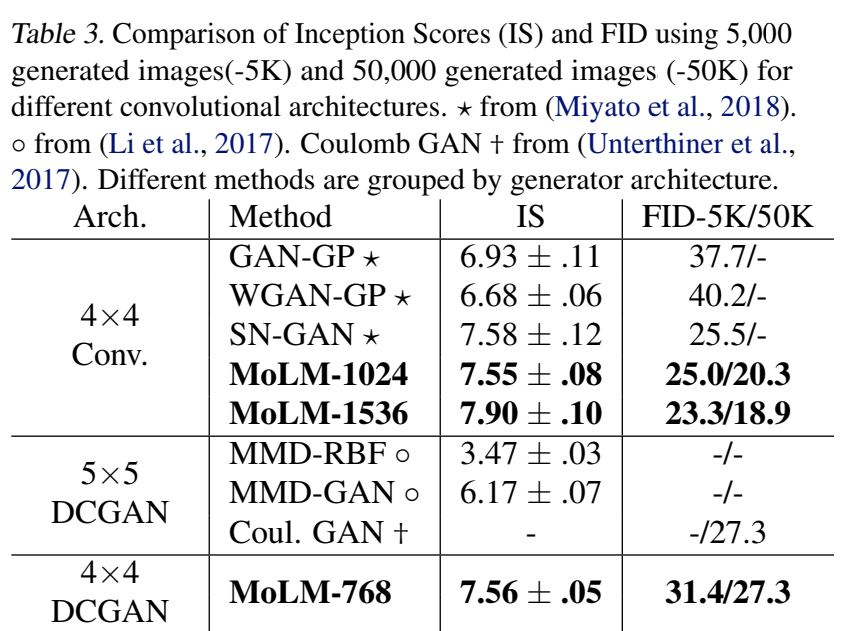
Authors propose to use a moment network \(f_\phi(x)\) and let \[ \Phi(x) = [\nabla_\phi f_\phi(x), x, h_1(x), \dots, h_{L-1}(x)]^T \] where \(h_l(x)\) is activations of \(l\)-th layer
Since moment function is not invertible anymore, the generator is trained by minimizing \[ \mathcal{L}^G(\theta) = \frac{1}{2} \left\| \frac{1}{N} \sum_{n=1}^N \Phi(x_n) - \mathbb{E}_{p(\varepsilon)} \Phi(g_\theta(\varepsilon)) \right\|_2^2 \]
Learning a Moment Network
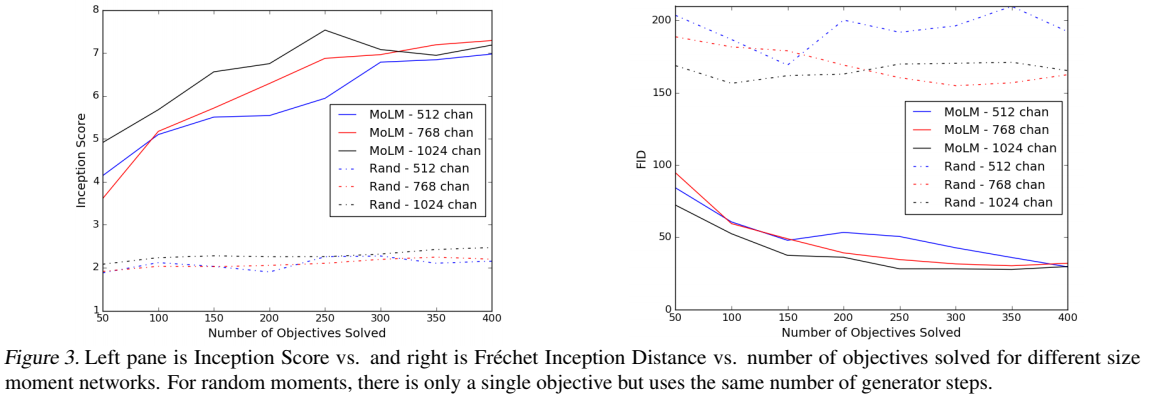
One could use a randomly initialized moment network \(f_\phi\)
That would have large asymptotic variance of \(\hat\theta_N\)
Ideally our \( \phi \) minimizes this asymptotic variance, which is approximately equivalent to maximizing \[ \| \mathbb{E}_{p(\varepsilon)} \Phi(g_\theta(\varepsilon)) - \mathbb{E}_{p_\text{data}(x)} \Phi(x) \|^2 \]
However author claim that this maximization makes moments correlated, and breaks consistency of \(\hat\theta_N\)
Authors follow prior work and introduce a binary classifier \[ \mathcal{L}^M(\phi) = \mathbb{E}_{p_\text{data}(x)} \log D_\phi(x) + \mathbb{E}_{p(\varepsilon)} \log (1-D_\phi(g_\theta(\varepsilon))) + \lambda R(x) \] where \( D_\phi(x) = \sigma(f_\phi(x)) \), and \(R\) regularizes \(\nabla_\phi f_\phi(x)\)
Even if we can't compute \( \mathbb{E}_{p(\varepsilon)} \Phi(g_\theta(\varepsilon)) \) analytically, and use Monte Carlo, this only increases asymptotic variance by a constant factor
The method works for any \(\phi\), we only train it occasionally to increase sample efficiency
Regularizes that controls asymptotic variance can be related to gradient penalty in WGANs