cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
Introduction
1
Alexander Isenko
24.04.2017
Offline
2
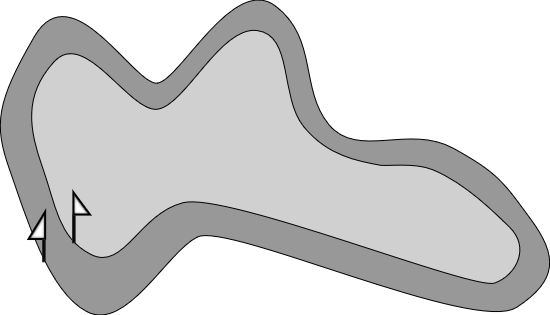
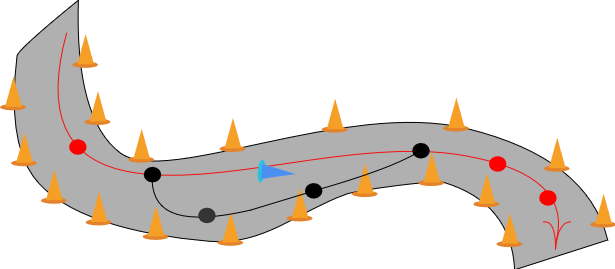
DGPS Coursewalk
Offline
3
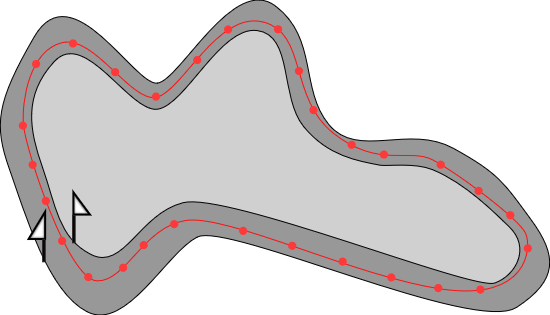
Approximating the optimal line
Iterative process based on minimizing curvature on randomly placed nodes. Depends on:
Online
4
Sensors
Position
Next node to approach
Controller
gas °
brakes °
turning wheel °
Real World
- speed
- wheel motion
- ...
Online
5
Sensors
Position
Next node to approach
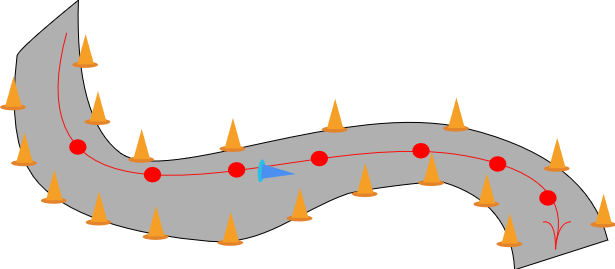
C
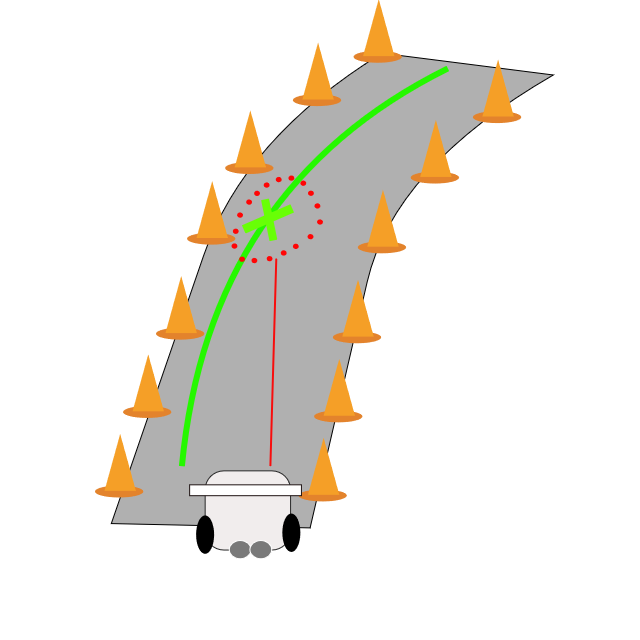
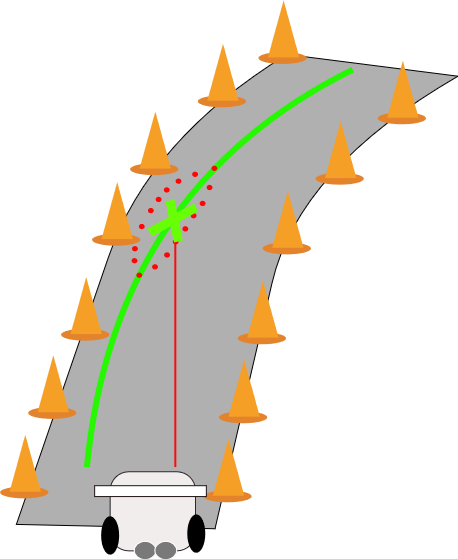
Obstacle detected
Online recalculation with simple Monte Carlo
Online
6
C
Sensors
Line
Gas / Brake / Steering
Task:
Online
7
Training
8
Controller
Sensors ~ CM
Line
Gas / Brake / Steering
CarMaker
Reward: -time
do action
Adversarial
Agent
Modify environment to disturb agent
Reward: time
Postface
9
By cirquit



