






cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
Bachelor Präsentation
1
Alexander Isenko
19.01.2017
Betreuer: Thomas Gabor M.Sc,
Dr. Lenz Belzner
3
Alexander Isenko
19.01.2017
4
Alexander Isenko
19.01.2017
5
Alexander Isenko
19.01.2017
6
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen
in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
7
Alexander Isenko
19.01.2017
RoboCup Small Size
RoboCup@Rescue
RoboCupSoccer Standart
RoboCupSoccer Humanoid
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
8
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
9
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
10
Alexander Isenko
19.01.2017
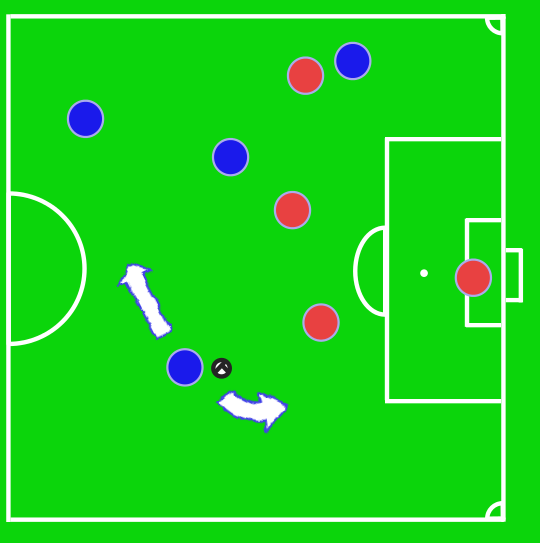
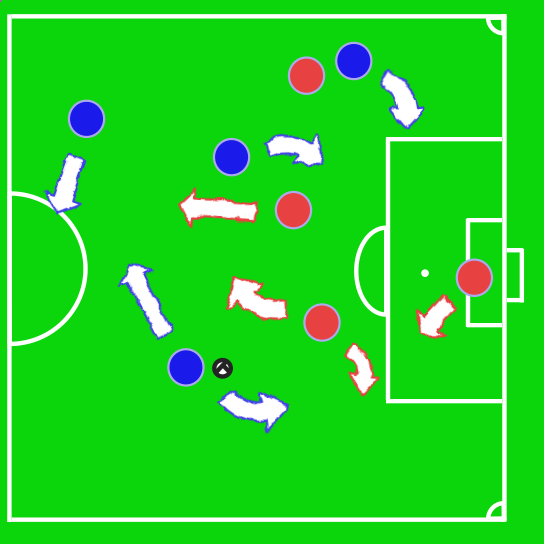
| Aktion | Bedeutung |
|---|---|
| Move | Bewegung in Richtung des Balls |
| Shoot | Schieße den Ball in Richtung des Tores |
| Dribble | Schieße den Ball vor dir hin und lauf hinterher |
| Intercept | Sprintet in Richtung des Balls |
| No-Op | Führe keine Aktion aus |
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
11
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
12
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
13
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
14
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
15
Alexander Isenko
19.01.2017
1:1
1:5
1:55
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
16
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
17
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
18
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
19
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
20
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
21
Alexander Isenko
19.01.2017
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
22
Alexander Isenko
19.01.2017
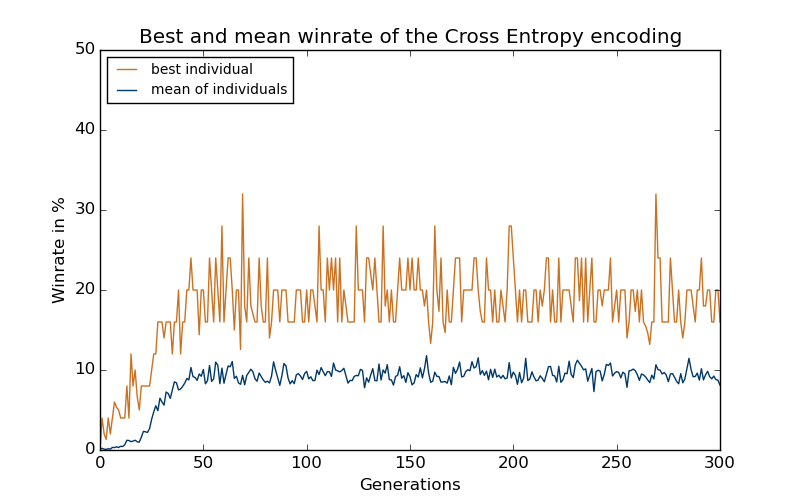
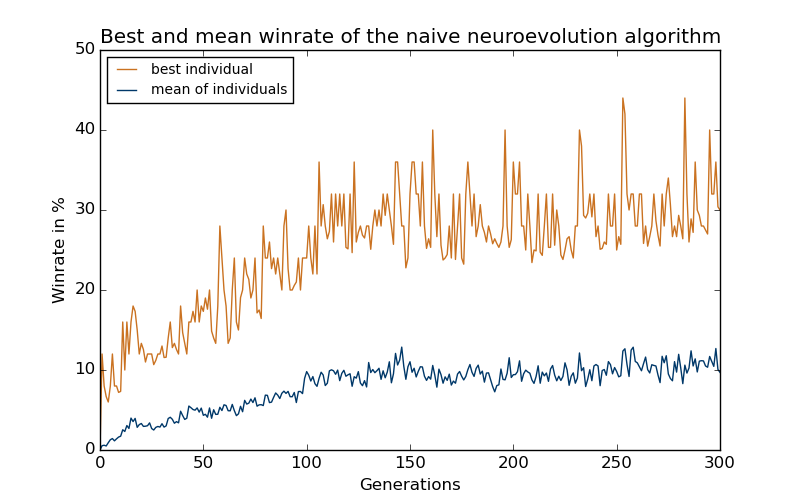
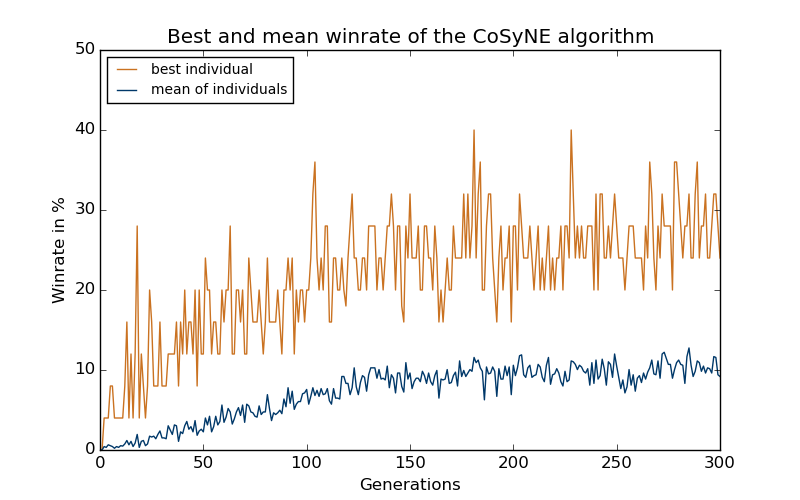
| Algorithmus | E(Trainierte Fit.) | E(Getestete Fit.) | E(Fehler) |
|---|---|---|---|
| Cross Entropy | 29.60% | 6.56% | 77.87% |
| CoSyNE | 37.60% | 12.45% | 66.98% |
| Naive Neuroevo. | 42.00% | 20.13% | 51.93% |
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
23
Alexander Isenko
19.01.2017
Video
24
Alexander Isenko
19.01.2017
25
Alexander Isenko
19.01.2017
[1] http://www.robocup.org/leagues
[2] http://www.robocup.org/a_brief_history_of_robocup
[3] https://github.com/LARG/HFO/blob/master/doc/manual.pdf
[4] F. Gomez, J. Schmidhuber, and R. Miikkulainen, “Efficient non-linear control
through neuroevolution,” in Proceedings of the European Conference on Machine
Learning, (Berlin), pp. 654–662, Springer, 2006
[5] https://gym.openai.com/docs/rl
26
Alexander Isenko
19.01.2017
Winkelkodierung
Lagekodierung
Boole'sche Kodierung
27
Alexander Isenko
19.01.2017
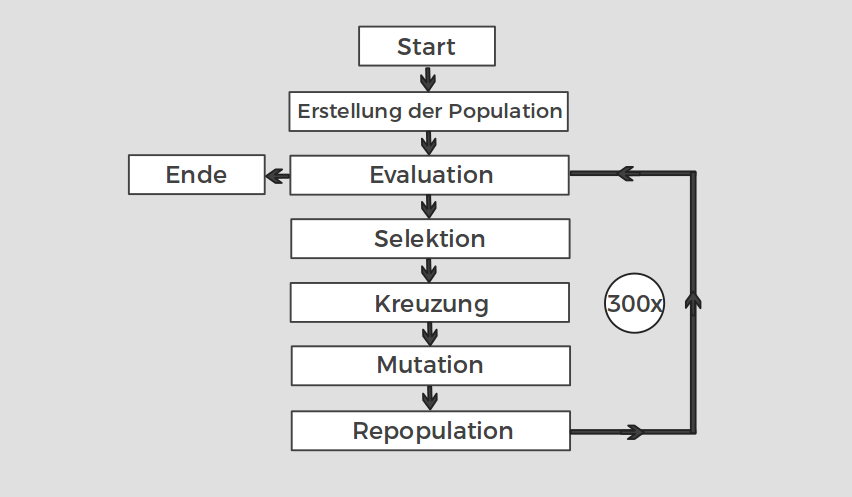
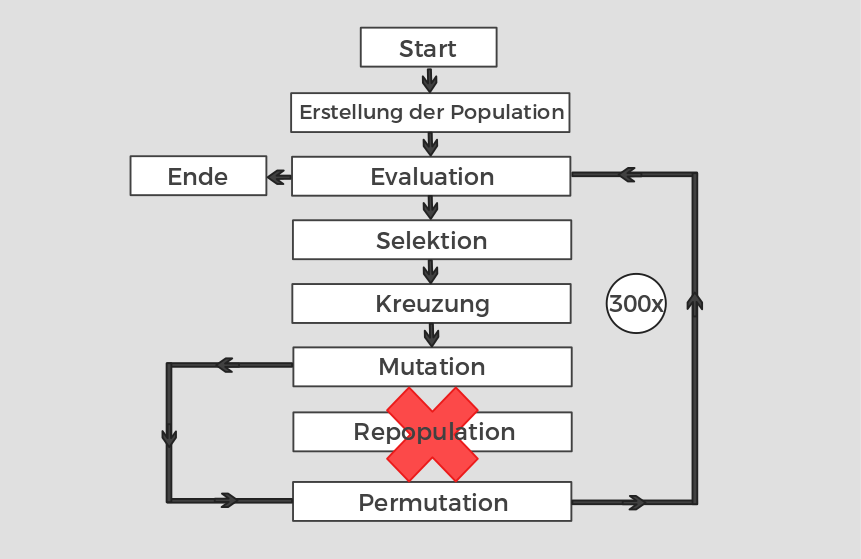
| Generationen | 300 |
|---|---|
| Populationsgröße | 50 |
| Teamepisoden | 25 |
| Episodenzeit | 500s |
| Ball nicht berührt | 50s |
| Selektion | 25% |
| Mutation | 10% |
28
Alexander Isenko
19.01.2017
29
Alexander Isenko
19.01.2017
By cirquit
Bachelor thesis presentation - Neuroevolution in RoboCup2D



