ECSE 321 - Tutorial 7
Dominic Charley-Roy
https://github.com/dominiccharleyroy
dominic.charley-roy @ mail.mcgill
Path Finding

Finding our way...
- Pathfinding is a class of algorithms which can find the route between two points.
- Algorithms exist for solving different complexities of problems:
- Are we in a 2D or 3D space?
- Are there obstacles?
- Are there moving obstacles?
- How much time do we have to make a decision?
- Will the end point change
Bomberman
Our particular problem
- We have a 2D grid.
- There are obstacles on the grid.
- These obstacles can appear/dissapear!
- We'd like our game to run smoothly, so there shouldn't be any discernible "thinking" phase.
- Enemies need to use 2 algorithms:
- Determining if Bomberman is within a certain distance.
- Finding the path to Bomberman / their next move position
Euclidean Distance
This is a formula for determining the distance between two points. You can think of this as if you drew a straight line between two points and measured it with a ruler.
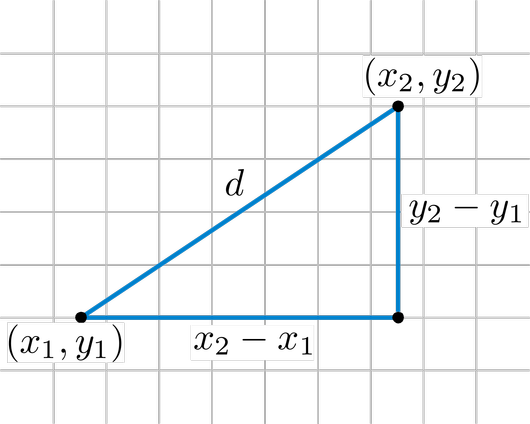
Euclidean Distance Cont'd.
Given the points (x1, y1) and (x2, y2), the distance is calculated by:
double distance = Math.sqrt(
Math.pow(x1 - x2, 2) + Math.pow(y1 - y2, 2));This can now help us answer questions such as Is Bomberman within the distance d from an enemy.
As the distance is initially a double, it is common to round it to work with it as an integer. Then we can check if distance <= 3. If we left it as a double, we have to worry about accuracy.
Taxicab Distance
This is a different metric for determining the distance between two points. Since we are working on a 2D grid, we can think of distance like we would in a regular city.
If a taxicab needs to drive up 3 blocks and then right 4 blocks to get you to your house, the distance is 7!
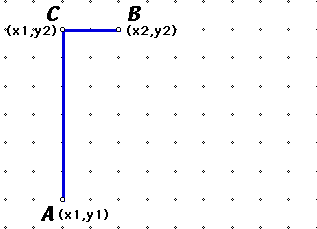
Taxicab Distance Cont'd
Given two points (x1, y1) and (x2, y2) the taxicab distance is calculated:
int distance = Math.abs(x1 - x2) + Math.abs(y1 - y2);Note: Taxicab distance gives you the distance as an int!
Also note that Taxicab distance only really makes sense if your points are integers (eg. no 10.5)
Distance Calculation Recap
- Euclidean distance draws a line between two points and measures it
- Taxicab is based on a city grid, and calculates the number of blocks between two points. (Only works for integer points)
- Both are heuristics and thus give therefore answers for distances.
- Neither take obstacles into consideration!
- DEMO TIME!!!
Finding the Shortest Path
A*
The A* Algorithm
- The A* algorithm lets you find the shortest distance between two points.
- It uses some kind of distance calculation - we'll be using Euclidean!
-
Our particular scenario:
- 2D grid where entities can move in 4 directions.
- Some cells are obstacles.
- Fast enough that we can recalculate easily so this supports the map changing.
Shortest Distance?
- The definition of shortest distance changes on the problem.
- In our case, we mean the shortest number of moves to get from one point to another.
- We assume that moving in any direction "costs" the same.
- Some problems are different! Suppose you are making Google Maps - there are actual distances between cities, and we want to find the path for which you have to drive the least!
Important Note
- A* isn't the only path finding algorithm - Dijkstra's algorithm is another famous one!
- Ideally, we want our algorithm to not only give us the shortest distance but the path that will give us this distance as well!
- For our monsters, it's no good knowing the shortest distance to get to Bomberman if we don't know how to move!
Some Background:
The Queue
- A Queue is a standard data structure which works like a line at a bank. You put items into it (enqueue) and can remove the item which has been in the queue for the longest (dequeue).
- People enqueue in the bank line and the person who was here first gets served first.
Some Background:
The Priority Queue
- A Priority Queue is a special type of Queue which is sorted based on some ordering.
- Instead of dequeue removing the first element, it removes the one with the highest priority.
- Java provides the PriorityQueue<T> class.
- Note that either the objects you put in the priority queue should be Comparable or you should provide a Comparator
- This has an add method (enqueue) and add method (dequeue).
- The queue is automatically sorted for you.
Some A* Terms
- A* works by exploring potential shortest paths one square at a time.
- We maintain a priority queue of candidates, which are squares which have not yet been explored but are adjacent to a square which has been.
- Here we order them based on how good the candidate is according to a heuristic (huh?!)
- We also maintain a set of closed points, which are squares that have already been seen and that we don't need to look at again.
The Basic Idea
- Initially only the starting point is in the queue of candidates.
- At each round, we dequeue "best" candidate.
- If the candidate is already in the closed list, ignore it.
- If the best candidate is the end point, we've found the shortest path!
- If not, we process the point and add it to the closed list.
- If our priority queue is empty and we never reached the end point, then there is no possible path!
"Best"?
Points are evaluated based on the sum of a "past" score and a "future" score.
- The past score is the length of the path from the starting point to this point.
- The future score is a guess at the length of the point to the finish.
- We have to guess since we don't know what obstacles we may see! We use a distance function here to guess!
- The best therefore has the lowest score:
score = pastDistance + futureDistance;What does a Point have?
- For our purposes, a Point object will have the following properties:
- int x, y representing their coordinates on the grid.
- Point parent a link to the point that was used tor each this point (or null if it's the starting point)
- int pastScore (should be parent.pastScore + 1)
- Note: futureScore can just be calculated so we don't need to store it!
- Once we've extracted the end point as the best candidate, we can build the path by repeatedly getting the parent's coordinates!
Processing a Point
- When we process a best candidate, we want to look at all the adjacent nodes and consider them all as potential candidates!
- For processing, we look each the 4 nodes (neighbors) next to the candidate. For each neighbor:
- If you can't walk to the neighbour (eg. it is a wall), ignore it.
- If the neighbour is in the closed list, ignore it.
- Create a new Point object representing the neighbour with the candidate as its parent and add it to the candidate queue.
The Candidate Queue
- Remember that the candidate queue is sorted. In our case, the best candidate has the lowest score.
- As we process nodes, we may visit a neighbour which is already in the candidate list but has not been processed yet! It's important to allow for this, as we may have found a better path!
- Note: Some priority queues let you update nodes, so you could use that instead of having a point appear multiple times in the candidate list.
- To keep this simple, we allow a point multiple times in the candidate list and simply check if it is already closed when processing.
Interactive Demo Time!
Initializing Pseudocode
List<Point> getShortestPath(startX, startY, endX, endY) {
// Create the queue of candidates.
PriorityQueue<Point> candidates = new PriorityQueue<Point>(
new PointComparator(endX, endY));
// Create a boolean 2D array representing if a given point
// is in the closed list.
boolean[][] closed = new boolean[sizeX][sizeY];
// Add the starting point to the list of candidates.
candidates.add(new Point(startX, startY, null, 0));
// ...
}Main Pseudocode
// Keep going until there are no candidates left.
while (!candidates.isEmpty()) {
// Get the best candidate.
Point candidate = candidates.poll();
// If the candidate is the end point, we've found the
// shortest path!
if (candidate.x == endX && candidate.y == endY)
return buildPath(candidate);
// If the candidate is already closed, ignore it.
if (closed[candidate.x][candidate.y])
continue;
// Look at each neighbor of the candidate.
for (Point neighbor : candidate.getNeighbors()) {
// If the neighbor is closed or cannot be walked to,
// it is ignored.
if (blocked[neighbor.x][neighbor.y] ||
closed[neighbor.x][neighbor.y])
continue;
// Add the candidate.
candidates.add(neighbor);
}
// Close the candidate.
closed[candidate.x][candidate.y];
}
// No path found!
return null;Comparator Pseudocode
We have to create a comparator specifically tailored to our end point to calculate the distance!
public class TestComparator implements Comparator<Point> {
public TestComparator(int endX, int endY) {
// Create a comparator based on a given end point.
this.endX = endX;
this.endY = endY;
}
public int compare(Point p1, Point p2) {
// Calculate past + future score for both points.
int score1 = p1.pastScore + distance(p1.x, p1.y, endX, endY);
int score2 = p2.pastScore + distance(p2.x, p2.y, endX, endY);
// Point 1 should be before Point 2 if score1 has a lower value.
return score1 - score2;
}
public int distance(x1, y1, x2, y2) {
// Insert distance function here!
}
}
getNeighbors Pseudocode
public class Point {
// ...
public List<Point> getNeighbors() {
List<Point> points = new ArrayList<>();
// Up direction
// Check if this point is within the boundaries of the map.
if (this.y > 0) {
// Create the up neighbor with the proper coordinates.
// The neighbor will have this point as its parent and
// takes the pastScore and adds 1 to represent the move.
Point upNeighbor = new Point(
this.x, this.y - 1,
this, this.pastScore + 1);
points.add(upNeighbor);
}
// Other directions...
return points
}
}Recap
- Distance functions let you determine if a point is within a given range from another point. Different ways of calculating this exist!
- Euclidean distance draws a line between 2 points and measures it.
- Taxicab distance pretends we are driving through city blocks to get to the point (can't go through buildings).
- Path finding algorithms such as A* let you find the shortest path between 2 points.
Copy of Copy of Copy of Copy of ECSE 321 - Tutorial 3
By dominiccharleyroy