ROBOT DE TRANSFERT DE PIÈCES
Réalisé Par :
-
El Ayeb Hayder
-
Ben Jaballah Moez
Encadré Par :
- Amara Sihem
Plan Du Projet
- Introduction Générale
- Généralités Sur La Robotique Industrielle
- Robot De Transfert De pièces
- Etude Théorique
- Etude Pratique
- Conclusion Générale
Introduction Générale
Depuis leur apparition sur les chaînes de production dans les années 1970, les robots industriels ont pris une place de plus en plus importante dans la plupart des secteurs où les opérations d’assemblage et les manipulations de produits sont récurrentes.
Durant les trois dernières décennies, les progrès technologiques ont rendu les robots plus flexibles, plus rapides et plus précis.
Notre projet consiste à réaliser un robot de transfert de pièces qui est très utilisé aujourd'hui en industrie.
Généralité sur la Robotique industrielle
Principe de Fonctionnement D’un Robot Industriel :
Un robot industriel doit être reprogrammable, rapide et précis, c’est un système équivalent d’un bras humain souvent composé de 6 degrés de liberté, 3 axes destinés au positionnement et 3 axes à l’orientation permettant de déplacer et d'orienter un outil dans un espace de travail donné.
Il se compose d'une partie mécanique (le bras), d'une armoire de commande composée d'une unité centrale qui pilote les électroniques de commande, d'un ou de plusieurs axes qui en assure l’asservissement et un variateurs de vitesse.
Domaine D'utilisation Du Robot Industriel
- Secteur automobile
Peinture,Etancheité,...
- Secteur Agro-alimentaire
Encaissage,Palettisation,...
- Secteur Industrie Générale
Soudure,Assemblage,Transfert,...
Robot de Transfert de Pièces
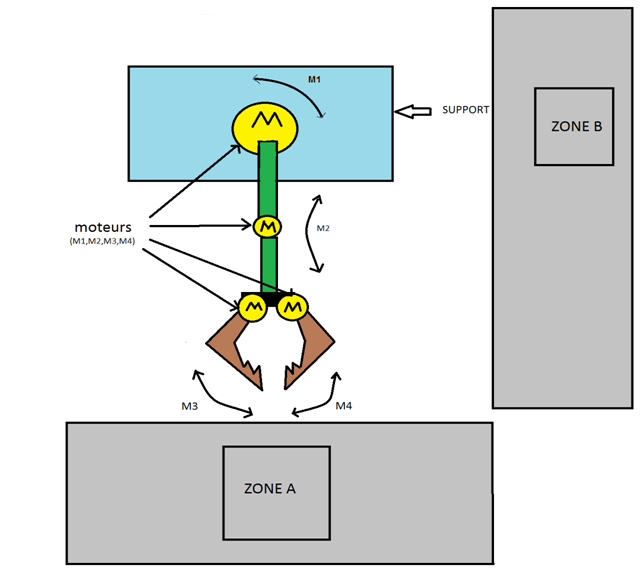
Présentation Du Robot
Notre Robot permet de déplacer une pièce qui se trouve dans une zone ‘A’ vers une autre zone ‘B’ à l’aide de quatre moteurs, comme ça montre le schéma suivant :
Etude Théorique
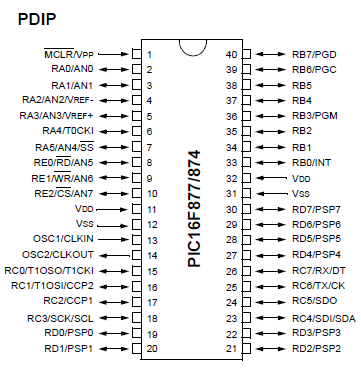
PIC16F877
Variateur De Vitesse
Un variateur de vitesse est un dispositif électronique destiné à commander la vitesse d'un moteur électrique, une nécessité pour de nombreux procédés industriels.
Le recours aux variateurs de vitesse offre plusieurs avantages :
- Démarrage progressif des moteurs réduisant les chutes de tension dans le réseau.
- Amélioration du facteur de puissance.
- Précision de la régulation de vitesse.
- Diminution de la consommation d’électricité.
Etude Pratique
Programmation
La programmation du microcontrôleur s’effectue avec le logiciel PIC C Compiler.
On a utilisé l'interface du PIC C Compiler pour crée le programme en langage C, après la compilation on obtient un fichier .hex qui sera ensuite charger dans le microcontrôleur.
Algorigramme
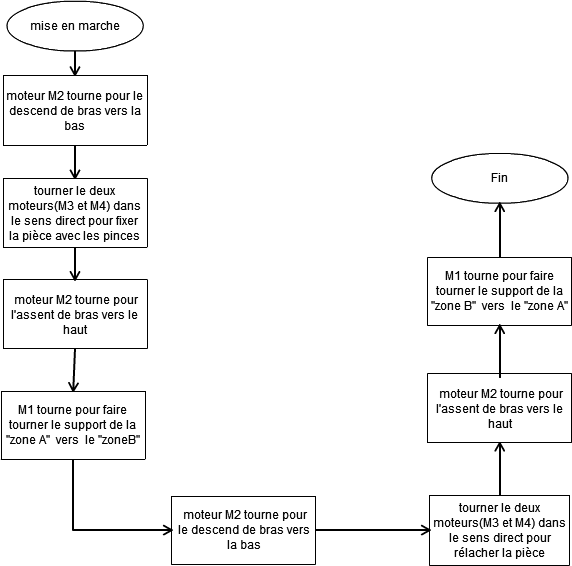
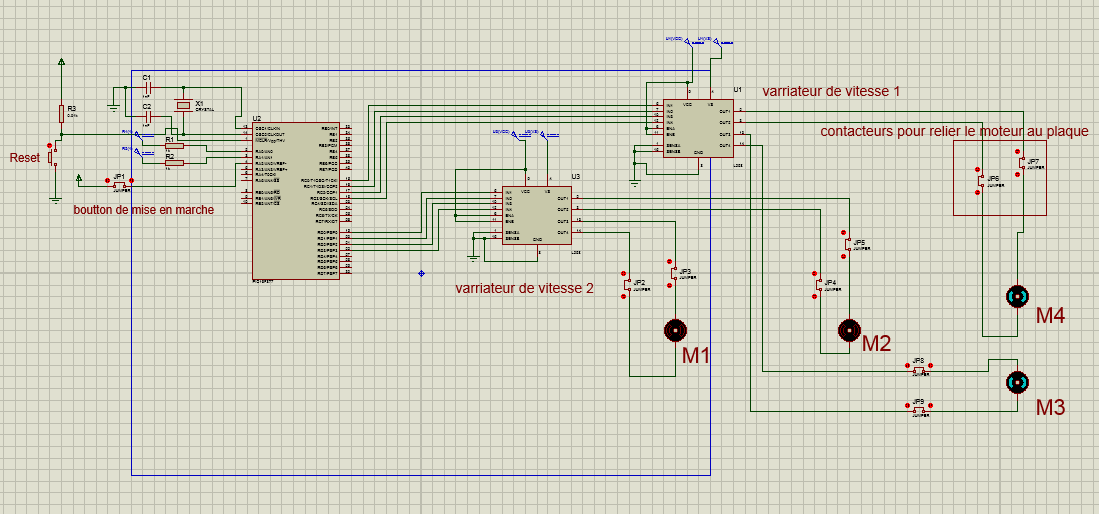
Schéma ISIS
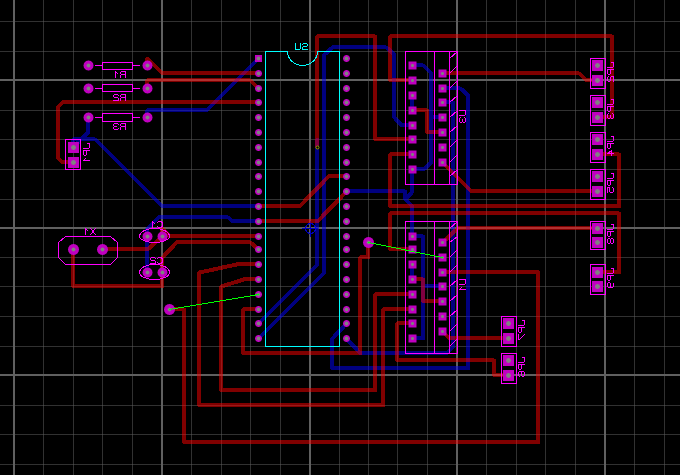
Typon ARES
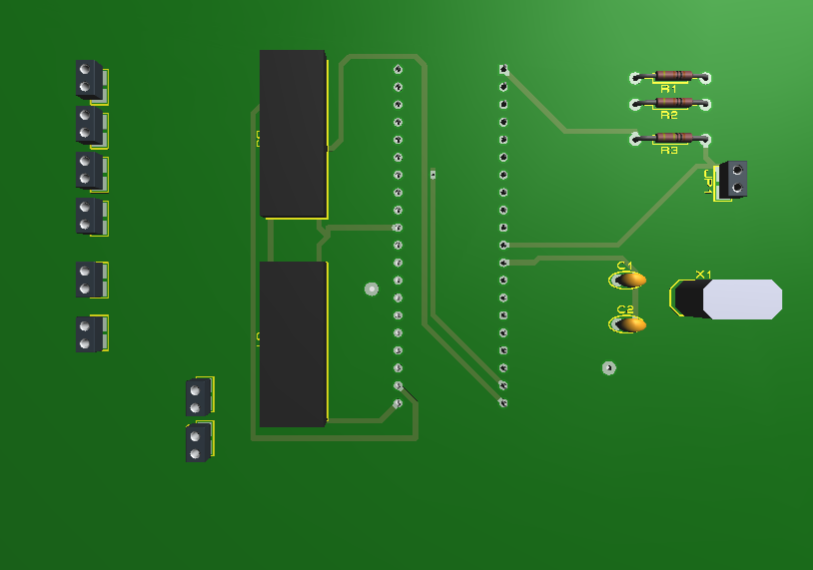
Plaque En 3D(Face1)
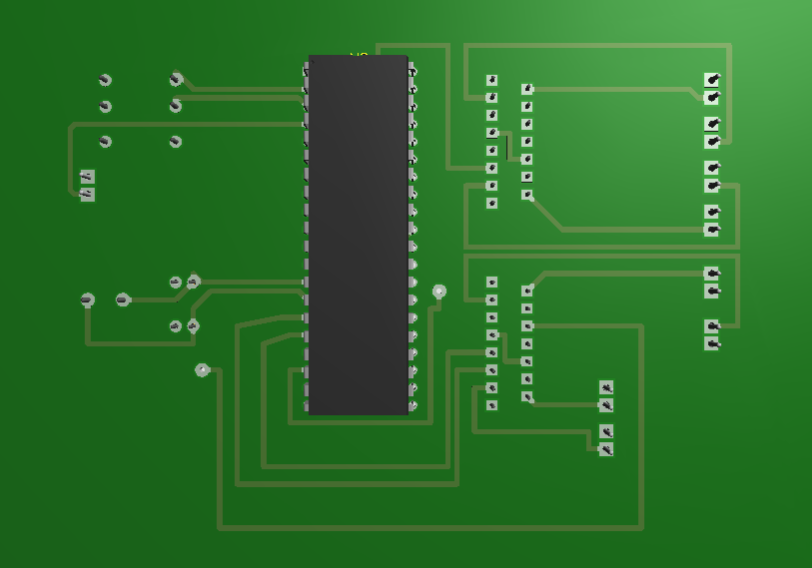
Plaque En 3D(Face2)
Conclusion Générale
Les robots industriels sont le plus performants car leur programmation est plus aisée.
Technologiquement parlant, ces robots sont plus faciles à construire car ils ne doivent pas reproduire des gestes complexes.
Si la précision est nécessaire, il faut simplement enregistrer les gestes humains, le coder sous la forme d'un langage mathématique, et ensuite programmer.
Merci Pour Votre ATTENTION
Robot de transfert de pièces
By Hayder Ayeb