
Probabilités et statistiques
Projet de
V. CARPE, S. EL AMRI, N. MENEUX, A. OBERTELLI, V. OSTERTAG, P. VALENTIN
PROMO 2018
20 JUIN 2016
Slide 1.2
Plan de la présentation
Group G1D - Probabilités et Statistiques
- Rappel sur le sujet
- Loi de Poisson et exponentielle
- Simulation et nombres aléatoires
- Simulation d'une station vélib'
- Estimation des paramètres
- Conclusion

Slide 1.3
Rappel du sujet
Group G1D - Probabilités et Statistiques
Etude, modélisation et simulation d'une station de vélib'


Approfondir nos connaissances sur le cours
Trouver la taille idéale d'une station
Trouver le nombre idéal de vélos par station
Certaines stations sont plus fréquentées que d'autres, déséquilibrant ainsi notre système et rendant la tâche difficile

Objectifs :
Slide 1.4
Modélisation
Group G1D - Probabilités et Statistiques
Chaque station doit :
Avoir au moins un emplacement pour déposer un vélib'
Avoir au moins un vélib' lors de la venue d'un usager

Toutes les 6 heures, le nombre d'emplacements et de vélib' sont réinitialisés
P_{E}
Probabilité d'avoir toujours un emplacement libre pendant 6 heures
P_{V}
Probabilité d'avoir toujours un vélo libre pendant 6 heures

P_{E} = P_{V} = 90\%
Slide 2.1
Group G1D - Probabilités et Statistiques
Loi de poisson
LOI EXPONENTIELLE
ET



Slide 2.2
Group G1D - Probabilités et Statistiques
Introduction

Établir des propriétés sur ces deux lois qui seront utiles dans notre modélisation
Notions abordées :
-
Variable aléatoire, moyenne, écart-type
-
Loi exponentielle
-
Loi poisson
Notations :
N(\tau)
Nombre de vélos arrivés pendant l'intervalle
\tau
p_{k}(\tau)
Probabilité que k vélos soient arrivés pendant
\tau
Temps entre l'arrivée de deux vélos
T
Slide 2.3
Group G1D - Probabilités et Statistiques
L’ESPÉRANCE

L'espérance d'une variable aléatoire correspond au résultat qu'on s'attend le plus à trouver.
E(X) = \int_{-\infty}^{+\infty} xf(x)dx
Soit X une variable aléatoire.
Si cette dernière est continue, on a alors :
Si elle est discrète :
E(X) = \sum_{i}P_{i}x_{i}
Slide 2.4
Group G1D - Probabilités et Statistiques
L’ESPÉRANCE
Dans notre cas, en utilisant la deuxième définition, on obtient :
E(N(\tau)) = \lambda\tau
Intervalle de temps
Paramètre de
p_{k}(\tau)
Interprétation
Il y a
\lambda\tau
vélos arrivant pendant cet intervalle de temps en moyenne.
Slide 2.5
Group G1D - Probabilités et Statistiques
L'écart-type
L'écart-type mesure la dispersion d'une variable aléatoire.
Nous l'avons calculé à partir de la définition :
\sigma^2 = E(X^2) - E^2(X)
Ce qui donne :
E(N(\tau)) = \sqrt{\lambda\tau}
Slide 2.6
Group G1D - Probabilités et Statistiques
l'écart-type
Interprétation :
\lambda\tau
68% du temps, on a un nombre de vélib' arrivant dans cet intervalle
+\sqrt{\lambda\tau}
95% du temps, on a un nombre de vélib' arrivant dans cet intervalle
99% du temps, on a un nombre de vélib' arrivant dans cet intervalle
Nombre de vélib'
Slide 2.7
Group G1D - Probabilités et Statistiques
Loi de poisson
Cette loi discontinue permet de décrire le nombre de fois qu'un événement se produira si l'on connait la moyenne de la fréquence d'apparition de ce dernier.

Siméon Denis Poisson
(1781 - 1840)

Mathématicien, physicien et géomètre
Connu pour ses très nombreux travaux (près de 400 publiés) et plus particulièrement pour la loi portant son nom.
Slide 2.8
Group G1D - Probabilités et Statistiques
Loi de poisson
p_{k}(\tau)
est donc une loi de poisson de paramètre
\lambda\tau
Résultats trouvés cohérents avec les valeurs vues en cours.
Soit
\lambda
le nombre moyen d’occurrences, on a alors la probabilité suivante
que l'événement se produise k fois :
p(k) = \frac{\lambda^k}{k!}e^{-\lambda}
Slide 2.9
Group G1D - Probabilités et Statistiques
Fonction de répartition
La fonction de répartition d'une variable est la probabilité d'obtenir l'événement {X<x}
Soit X, une variable aléatoire :
F_X(x) = p\{X < x \}
Dans le projet, on obtient :
F_T(\tau) = 1 - e^{-\lambda \tau}
Interprétation
La probabilité que deux vélos arrivent espacés d'une durée inférieure à
\tau
est de
1 - e^{-\lambda \tau}
Slide 2.10
Group G1D - Probabilités et Statistiques
Loi exponentielle
Cette loi permet de modéliser la durée de vie d'un phénomène sans usure.
Soit X une variable aléatoire et t une durée. On a :
f(t) = \alpha e^{-t\alpha}
T suit bien une loi exponentielle et nous retrouvons bien la fonction de répartition indiquée dans le cours
Slide 2.11
Group G1D - Probabilités et Statistiques
Propriété de cette loi
On retrouve bien :
E(T) = \frac{1}{\lambda}
\sigma = \frac{1}{\lambda}

Espérance obtenue avec sa définition continue
Slide 2.12
Group G1D - Probabilités et Statistiques
Calcul de durées
t_{10\%} = \frac{-\ln(0.9)}{\lambda}
t_{90\%} = \frac{-\ln(0.1)}{\lambda}
Durée telle que
P(T < t_{10\%}) = 0.1
P(T < t_{90\%}) = 0.9
et
Slide 2.13
Group G1D - Probabilités et Statistiques
Application
Flux d'arrivées et de sorties de vélos représenté par une loi de Poisson de
et
\lambda_{in}
\lambda_{out}
de paramètres
\lambda_{in} > \lambda_{out}
Plus d'arrivées de vélos que de sorties.
Si :
\lambda_{in} < \lambda_{out}
Plus de sorties de vélos que d'arrivées
Le temps d'attente moyen pour un usager pour obtenir un vélo quand la station est vide est de
\frac{1}{2\lambda}
Slide 3.1
Group G1D - Probabilités et Statistiques
Simulation
et
nombres aléatoires


Slide 3.2
Group G1D - Probabilités et Statistiques
Introduction
Nous allons tenter de générer des méthodes suivant les lois de Poisson et exponentielle vues précédemment
Notions abordées :
-
Générateur de nombres aléatoires
-
Méthodes de simulation modernes
-
Outils informatiques
Slide 3.3
Group G1D - Probabilités et Statistiques
Génération d'un nombre aléatoire
Génération par phénomènes imprévisibles
Comme les dés, la roulette, un tirage au sort, ...
Inconvénient : Souvent biaisées, pas assez sûres.
Génération par algorithme

Bien que déterministes, les programmes possèdent des opérations assez imprévisibles, utilisables pour cela.

Utilisation de phénomènes physiques
La radioactivité, les bruits thermiques, la mécanique quantique, ... permettent cela.
Méthode la plus efficace mais ardue à mettre en place
Slide 3.4
Group G1D - Probabilités et Statistiques
Méthode de monte-Carlo


Nicholas Metropolis
(1915 - 1999)
Physicien
A inventé en 1947 cette méthode avec Stanislaw Ulam
Employée pour le calcul d'intégrales et les simulations probabilistes.
Principe :
On place aléatoirement des points sur un espace défini où se trouve la courbe.
La valeur de l'aire sous la courbe (l'intégrale) est proportionnelle au nombre de points sous la courbe.
Slide 3.5
Group G1D - Probabilités et Statistiques
Méthode de monte-Carlo
Point placé aléatoirement
Slide 3.6
Group G1D - Probabilités et Statistiques
Génération d'une variable aléatoire
Elle suivra une loi exponentielle de paramètre lambda.

Possibilité de générer un nombre U aléatoirement entre 0 et 1
Outil à notre disposition
Nous sommes arrivés à la loi :
t_{u} = \frac{-\ln{(1-u)}}{\lambda}

Si u=1, on obtiendra une erreur. Il faudra retirer un nombre aléatoire dans ce cas.
Slide 3.7
Group G1D - Probabilités et Statistiques
Application
Moyenne
(=19,7)
t_{90\%}
t_{10\%}
(=46)
(=2,1)
T_k < t_{10\%}
T_k > t_{90\%}
8,5 % des échantillons
10,8 % des échantillons
Slide 3.8
Group G1D - Probabilités et Statistiques
Application (code)
//Génération de 1000 échantillons T avec une moyenne égale à 20s
t=-log(1-grand(1000,1,"def"))/0.05
//Recherche de la moyenne associée à T
E=0
for i=1:1000
E=E+t(I,1)
end
E=E/1000
disp(E)


Permet d'obtenir 1000 nombres aléatoires entre 0 et 1
Slide 3.9
Group G1D - Probabilités et Statistiques
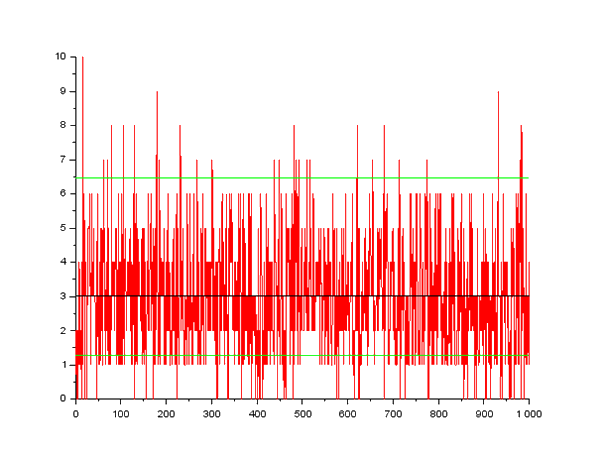
Génération de loi de poisson

Moyenne
(=3)
E+2\sigma
(=6,5)
E-\sigma
(=1,3)
N_k < E - \sigma
20,9% des échantillons
2,7% des échantillons
N_k > E + 2\sigma
Slide 3.10
Group G1D - Probabilités et Statistiques
Histogramme de la densité

Valeurs théoriques
Valeurs empiriques
Slide 3.11
Group G1D - Probabilités et Statistiques
Histogramme de la densité

N > E+2\sigma
N < E-\sigma
- { N < E− 𝜎} correspond à la moitié de la probabilité que l’événement soit en dehors d’une bande d’une largeur de deux écarts type centrée sur la moyenne.
- {E+2 𝜎 } correspond à la moitié de la probabilité que l’événement soit en dehors d’une bande d’une largeur de quatre écarts type centrée sur la moyenne.
Slide 4.1
Group G1D - Probabilités et Statistiques
simulation
D'une station


Slide 4.2
Group G1D - Probabilités et Statistiques
Introduction
Vérifier les résultats obtenus lors d'études précédentes
Hypothèses :
- Flux d'entrée et de sorties suivent une loi de Poisson aux paramètres connus.
- Réinitialisation des flux tous les
\Delta t
On cherche à vérifier que le système est optimale pour :
(nombre de vélos dispo) soit égal à 22
(nombre d'emplacements dispo) soit égal à 22
soit égal à 6h
\Delta t
N_V(0)
N_E(0)
Slide 4.3
Group G1D - Probabilités et Statistiques
Relation
N_E(t) + N_V(t) = N_E(0) + N_V(0)
Interprétation :
- On voit que le nombre de vélos / d'emplacements ne peut dépasser la capacité de la station.
- Traduit la dépendance entre ces deux variables
Génération des données
Génération d'une suite d'instants d'arrivée
Génération d'une suite d'instants de sortie
- Reconstitution de la trame temporelle
- Déduction du nombre de vélos présents à chaque instant de modification
Slide 4.4
Group G1D - Probabilités et Statistiques
Extraction des données utiles
Limitation du cadre temporel de l'expérience : on ne garde que les valeurs concernées
Balayage des valeurs conservées pour repérer les cas extrêmes
Slide 4.5
Group G1D - Probabilités et Statistiques
Application
Slide 4.6
Group G1D - Probabilités et Statistiques
Démonstration sur Scilab
Slide 5.1
Group G1D - Probabilités et Statistiques
estimation des paramètres


Slide 5.2
Group G1D - Probabilités et Statistiques
Introduction
Déterminer les paramètres exprimés lors de la première partie du sujet.

Pour se faire, nous allons exploiter les données d'une station de vélib' du 31 mai 2013
Slide 5.3
Group G1D - Probabilités et Statistiques
Estimateur
Un estimateur permet d'évaluer un paramètre inconnu d'une loi de probabilité
La pertinence de l'estimation dépend de différents facteurs :
- Sa convergence
- Son biais
- Son efficacité
- Sa robustesse
Slide 5.3
Group G1D - Probabilités et Statistiques
Maximum de vraisemblance
Un estimateur peut être trouvé à l'aide de cette méthode.


Ronald Aylmer Fisher
(1890 - 1962)
Botaniste et statisticien
Un des fondateurs de la statistique moderne.
Principe :
- On suppose que la variable nous intéressant suit une loi connue
- On calcule sa vraisemblance qui mesure la probabilité que les observations connues suivent une loi donnée.
- Le paramètre maximisant la ressemblance est l'estimateur cherché
Slide 5.4
Group G1D - Probabilités et Statistiques
Notre estimateur
En utilisant cette méthode, on obtient :
\hat{\lambda} = \frac{\sum_{k=1}^{n} X_k}{n}
échantillon k
nombre d'échantillons
C'est un estimateur sans biais et convergent.
Estimateur absolument convergent
Slide 5.5
Group G1D - Probabilités et Statistiques
Borne de Cramér-Rao
Borne permettant d'affirmer le caractère efficace d'un estimateur trouvé.

Estimateur
Dans notre cas :
Var(\hat{\lambda}) = \lambda
et
I(\lambda) = \frac{1}{\lambda}
Notre estimateur est donc efficace.
Slide 5.6
Group G1D - Probabilités et Statistiques
Les intervalles de confiance
Nous renseigne sur la précision qu'a notre estimateur. Cet intervalle contient toujours la valeur réelle du paramètre.
Notre intervalle est le suivant :
\frac{1}{\tau}(\hat{a}-t(\sqrt{\frac{\hat{a}}{n}})) < \lambda < \frac{1}{\tau}(\hat{a}+t(\sqrt{\frac{\hat{a}}{n}}))
\hat{a} = \hat{\lambda}\tau
Slide 5.7
Group G1D - Probabilités et Statistiques
Application
Démonstration sous Scilab
Conclusion
Slide 6.1
Group G1D - Probabilités et Statistiques

Probabilité
By isvoli



