Aim 3: Posterior Sampling and Uncertainty
October 18, 2022
Score SDE (refresher)
0. Ito process
\text{d}x = f(x, t)\text{d}t + g(t)\text{d}w
1. [Anderson, 82] Reverse-time SDE
\text{d}x = [f(x, t) - g^2(t)~\nabla_x \log~p_t(x)]\text{d}t + g(t)\text{d}\bar{w}
\(\implies\)
2. [Song, 21] SDE Score Network
\theta^* = \arg \min \mathbb{E}_{(t,~x(0),~x(t) \mid x(0))}\left[\| s_\theta(x(t), t) - \nabla_x \log~p_{0t}(x(t)\mid x(0))\|_2^2\right]
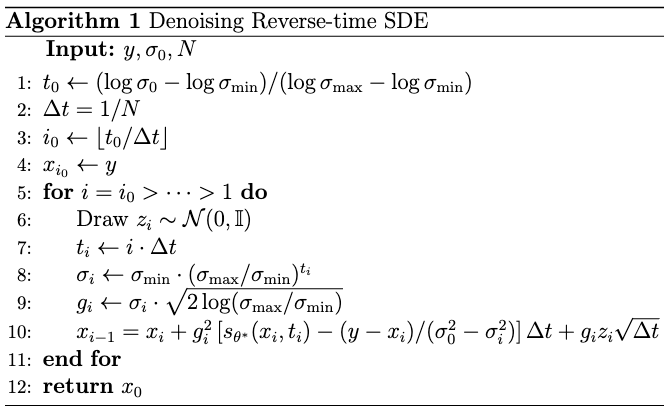
Denoising Reverse-time SDE (no drift)
x_t = x_{t + 1} + g^2_{t + 1} \left[\nabla_x \log~p(x_{t+1}) + \nabla_x \log~p(y \mid x_{t+1})\right]~\Delta t + g_{t+1}z_{t+1}\sqrt{\Delta t}
Forward-time SDE





We use
\text{d}x = \sqrt{\frac{\text{d}}{\text{d}t}\sigma^2(t)} \text{d}w,~\sigma(t) = \sigma_{\min} \cdot \left(\frac{\sigma_{\max}}{\sigma_{\min}}\right)^t\\
\(x(0)\)
\(\sigma_{\min} = 0.01\)
\(x(T=1)\)
\(\sigma_{\max} = 1\)
Denoising reverse-time SDE (Euler)
We have
\nabla_x \log~p(y \mid x_t) = \frac{y - x_t}{\sigma^2_0 - \sigma^2_t}
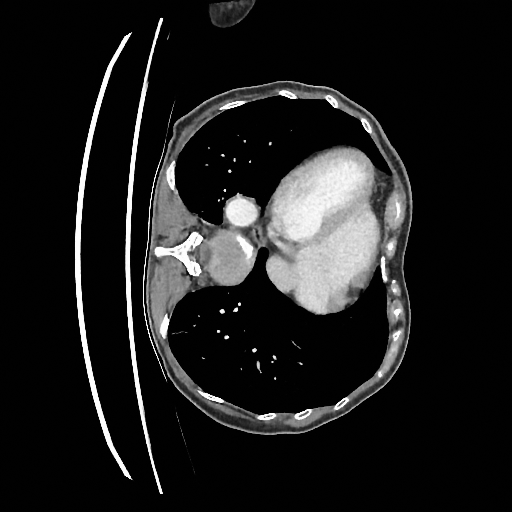
Training a continuous-time score network on Abdomen CT
Hardware: 8 NVIDIA RTX A5000 (24 GB of RAM each)

Sampling results

Original
Original
Perturbed
Samples

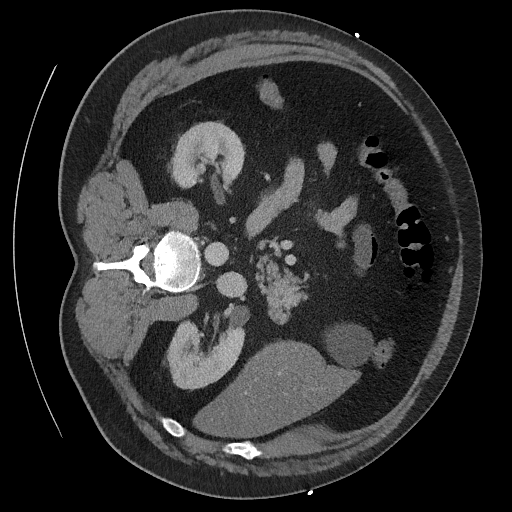

Sampling results

Original
Original
Perturbed
Sampled



Sampling results

Some notions of uncertainty
Mean
Standard Deviation
Quantile




Some notions of uncertainty
Mean
Standard Deviation
Quantile





Next steps
How to grant these notions of uncertainty with guarantees? For example
. "How far is the true image from a new sample?''
. "How likely is it to observe an unrealistic sample?''
. "How do we know if the computed empirical distribution contains the ground truth?''
Solving general linear inverse problems:
SNIPS [Kawar, 21]
y = Hx + z,~z \sim \mathcal{N}(0, \sigma^2_0 \mathbb{I})
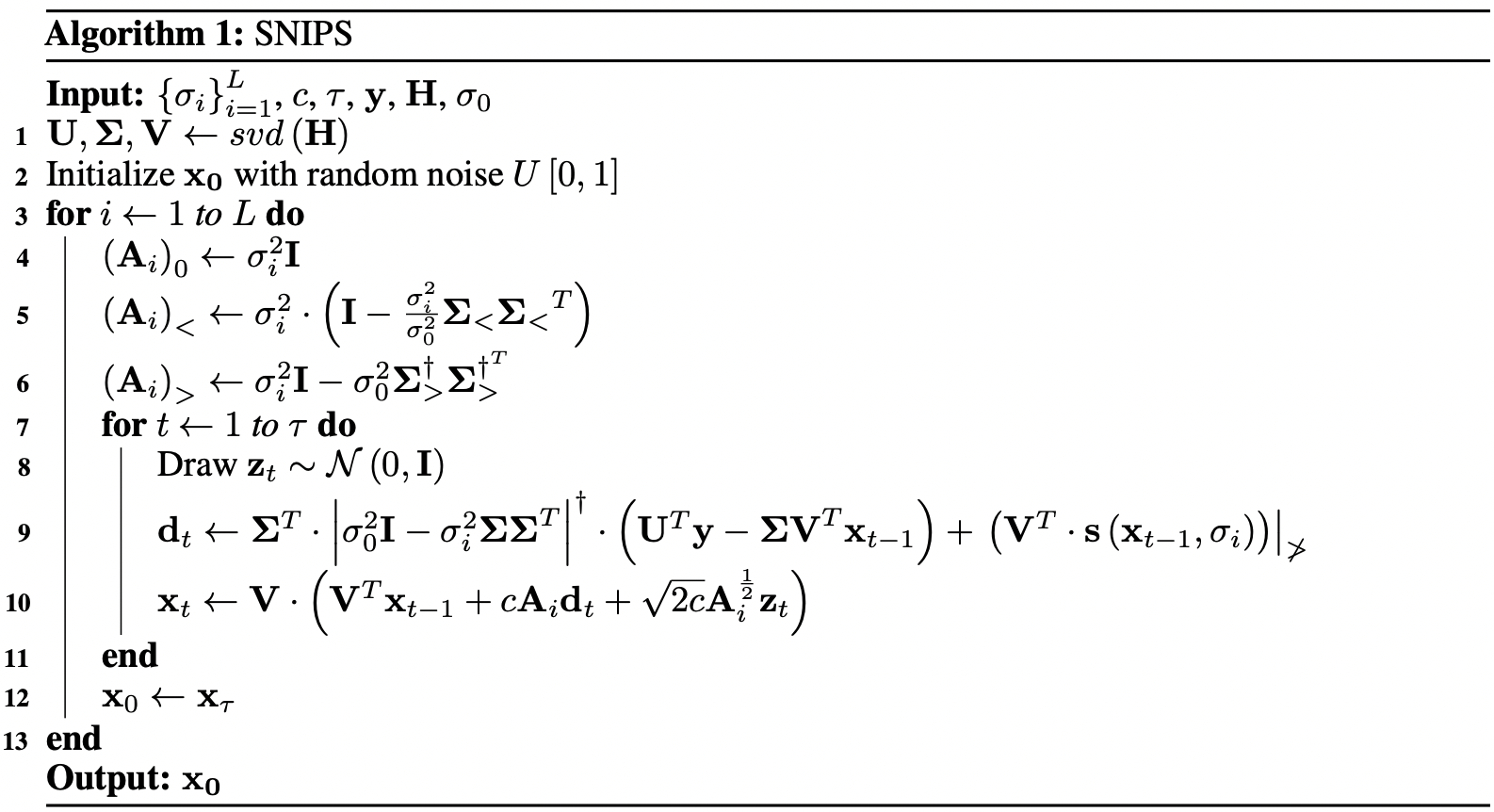
\nabla_x \log~p(x)
\nabla_x \log~p(y \mid x)
Main idea: Sample in the SVD space of \(H\)
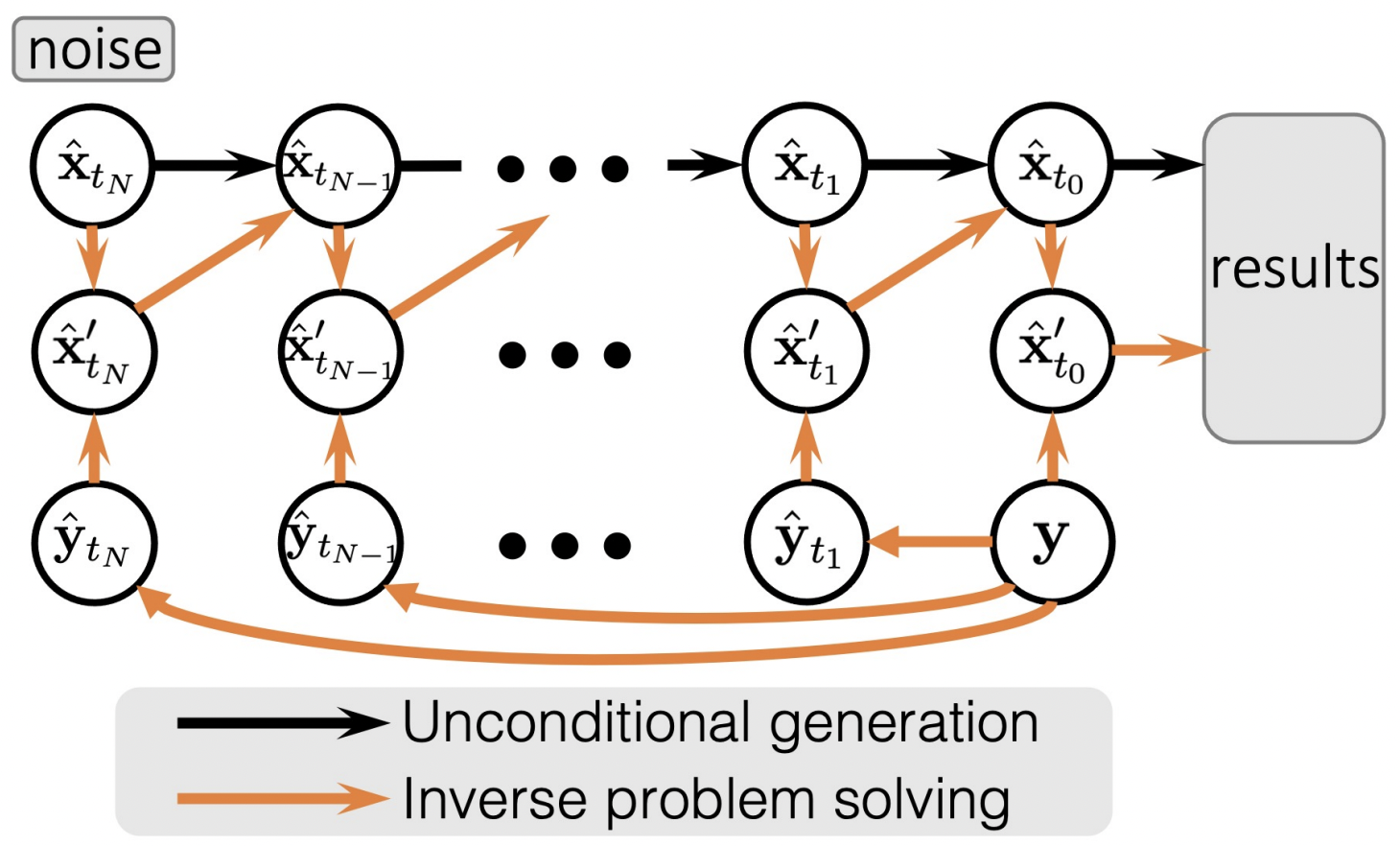
Solving general linear inverse problems:
Solving Inverse Problems in Medical Imaging [Song, 22]
y = Ax + \epsilon,~\epsilon \sim \mathcal{N}(0, \sigma^2_0 \mathbb{I})
Main idea: Avoid the SVD decomposition by constructing \(\{\hat{y}_{t_i}\}_{i=0}^N\)
[10/18/22] Aim 3: Posterior Sampling and Uncertainty
By Jacopo Teneggi




