Four questions
Jeremias Sulam
On learned proximals and conformal risk control
Inverse Problems
y = A x^* + v
measurements
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
reconstruction
Inverse Problems
y = A x^* + v
measurements
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
reconstruction
= \arg\min_x ~-\log p(y|x) - \log p(x)
= \arg\max_x~ p(x|y)
\text{MAP estimate when }R(x) \propto -~p_x(x):\text{ prior}
Mathematical tractability vs Complexity
in a box
simpler models
more assumptions
any model
no assumptions
Denoiser
Linear models
Linear networks
Shallow
ReLU Networks
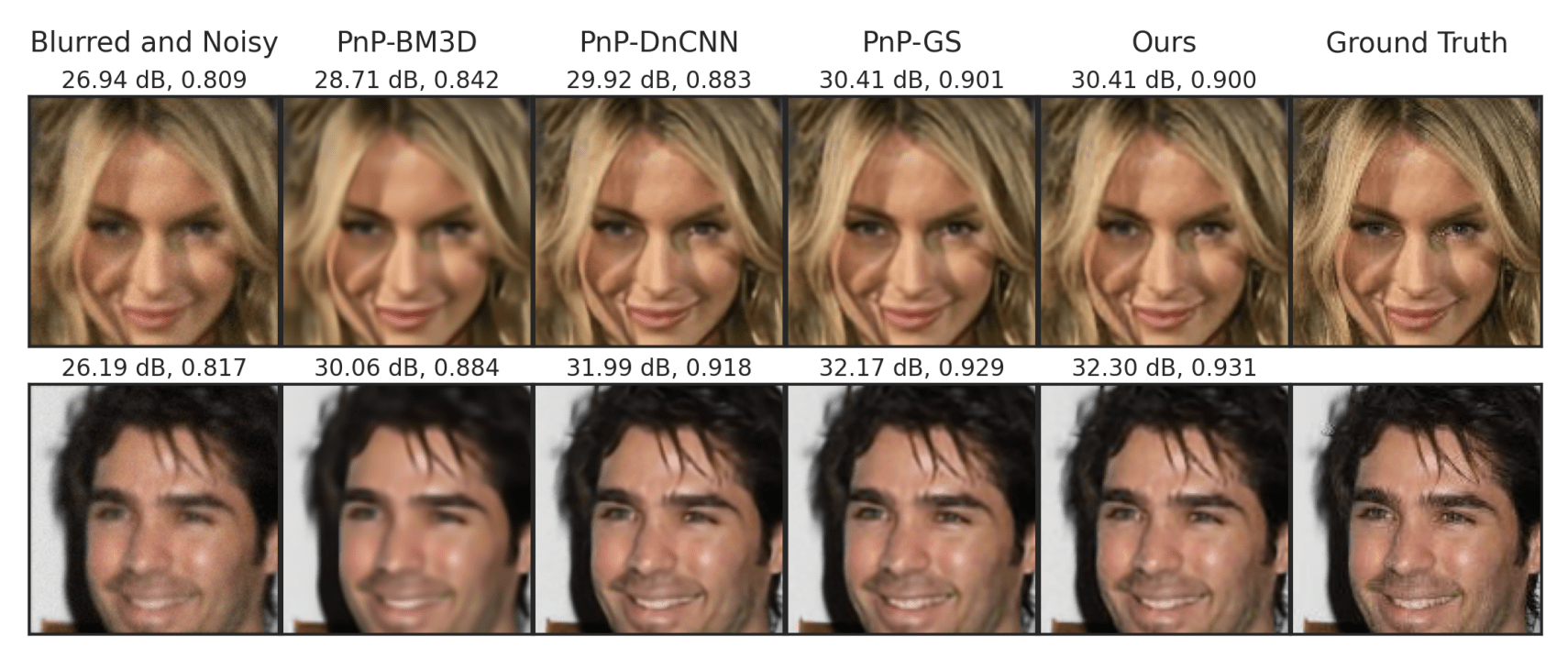
PnP
Just ask GPT
Learned Proximals
Conformal guarantees for diffusion models
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
Proximal Gradient Descent: \( x^{t+1} = \text{prox}_R \left(x^t - \eta A^T(Ax^t-y)\right) \)
\text{prox}_R \left( u \right) = \arg\min_x \frac 12 \|u - x\|_2^2 + R(x)
= \texttt{MAP}(x|u), \qquad u = x + v
... a denoiser
\({\color{red}f_\theta}\)
[Venkatakrishnan et al., 2013; Zhang et al., 2017b; Meinhardt et al., 2017; Zhang et al., 2021; Gilton, Ongie, Willett, 2019; Kamilov et al., 2023b; Terris et al., 2023; S Hurault et al. 2021, Ongie et al, 2020; ...]
Learned Proximals
: revisiting PnP
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\), and for what \(R(x)\)?
Question 2)
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct"
\(R(x) \propto -\log p_x(x)\)?
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
Proximal Gradient Descent: \( x^{t+1} = \text{prox}_R \left(x^t - \eta A^T(Ax^t-y)\right) \)
\text{prox}_R \left( u \right) = \arg\min_x \frac 12 \|u - x\|_2^2 + R(x)
= \texttt{MAP}(x|u), \qquad u = x + v
... a denoiser
\({\color{red}f_\theta}\)
[Venkatakrishnan et al., 2013; Zhang et al., 2017b; Meinhardt et al., 2017; Zhang et al., 2021; Gilton, Ongie, Willett, 2019; Kamilov et al., 2023b; Terris et al., 2023; S Hurault et al. 2021, Ongie et al, 2020; ...]
Learned Proximals
: revisiting PnP
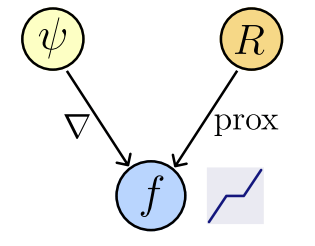
Theorem [Fang, Buchanan, S.]
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\), and for what \(R(x)\)?
Let \(f_\theta : \mathbb R^n\to\mathbb R^n\) be a network : \(f_\theta (x) = \nabla_\theta \psi (x)\),
where \(\psi_\theta : \mathbb R^n \to \mathbb R,\) convex and differentiable (ICNN).
Then,
1. \(\exists ~R_\theta : \mathbb R^n \to \mathbb R\) not necessarily convex : \(f_\theta(x) \in \text{prox}_{R_\theta}(x),\)
(1. Follows from [Gribonval & Nikolova, 2020, Corollary 1])
2. We can compute \(R_{\theta}(x)\) by solving a convex problem
Learned Proximals
: revisiting PnP
\text{Let } y = x+v , \quad ~ x\sim p_x, ~~v \sim \mathcal N(0,\sigma^2I)
f_\theta = \arg\min_{f_\theta:\text{prox}} \mathbb E_{x,y} \left[ {\ell (f_\theta(y),x)} \right]
Question 2)
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct" \(R(x) \propto -\log p_x(x)\)?
Learned Proximals
: revisiting PnP
Theorem [Fang, Buchanan, S.] (informal)
\hat{f}^* = \arg\min_{f} \lim_{\gamma \searrow 0}~ \mathbb E_{x,y} \left[ \ell^\gamma_\text{PM}(f_\theta(y),x)\right]
\hat{f}^*(y) = \arg\max_c p_{x|y}(c) = \text{prox}_{-\sigma^2\log p_x}(y)
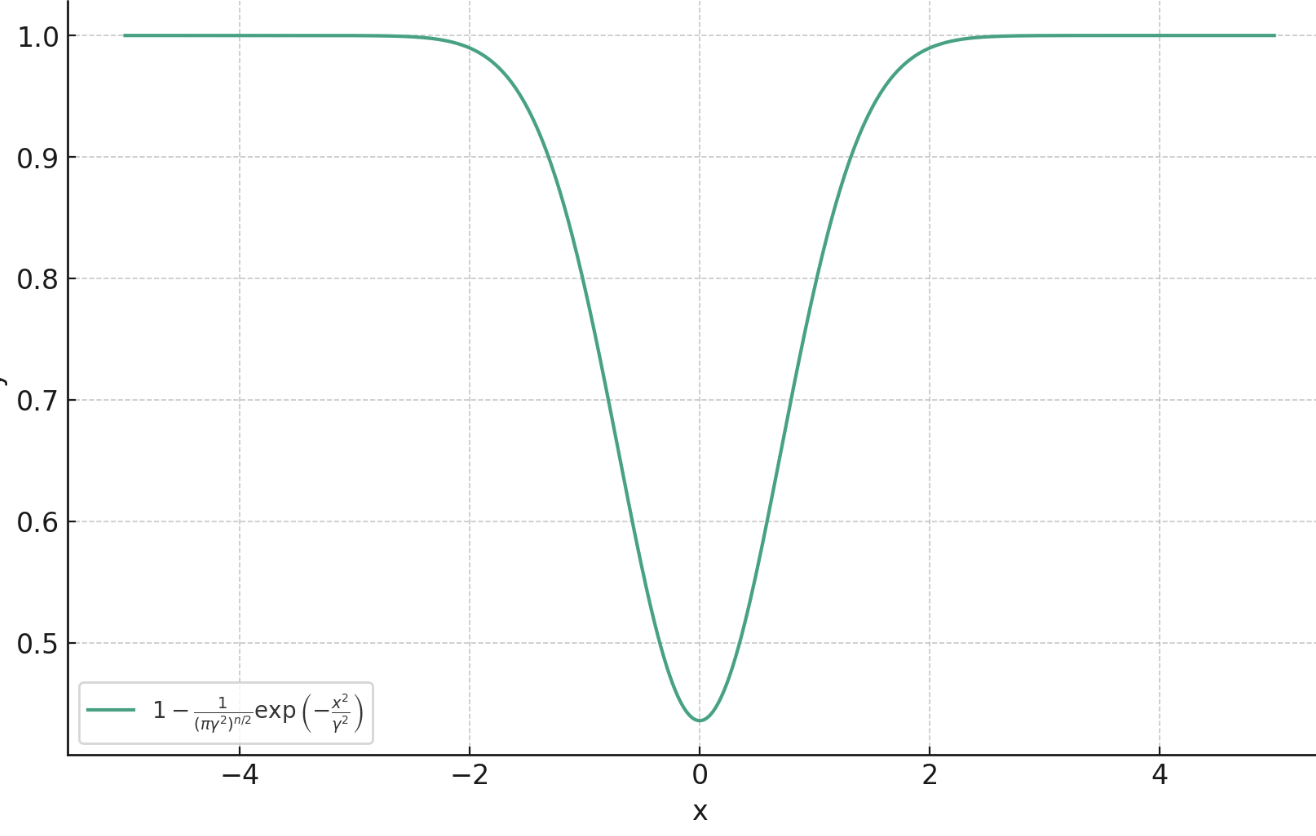
\ell^\gamma_\text{PM} (f_\theta(y),x) = 1- \frac{c}{\gamma^{2n}} \exp\left( -\frac{\|f(y)-x\|_2^2}{\gamma} \right)
Proximal Matching Loss:\(\gamma\)
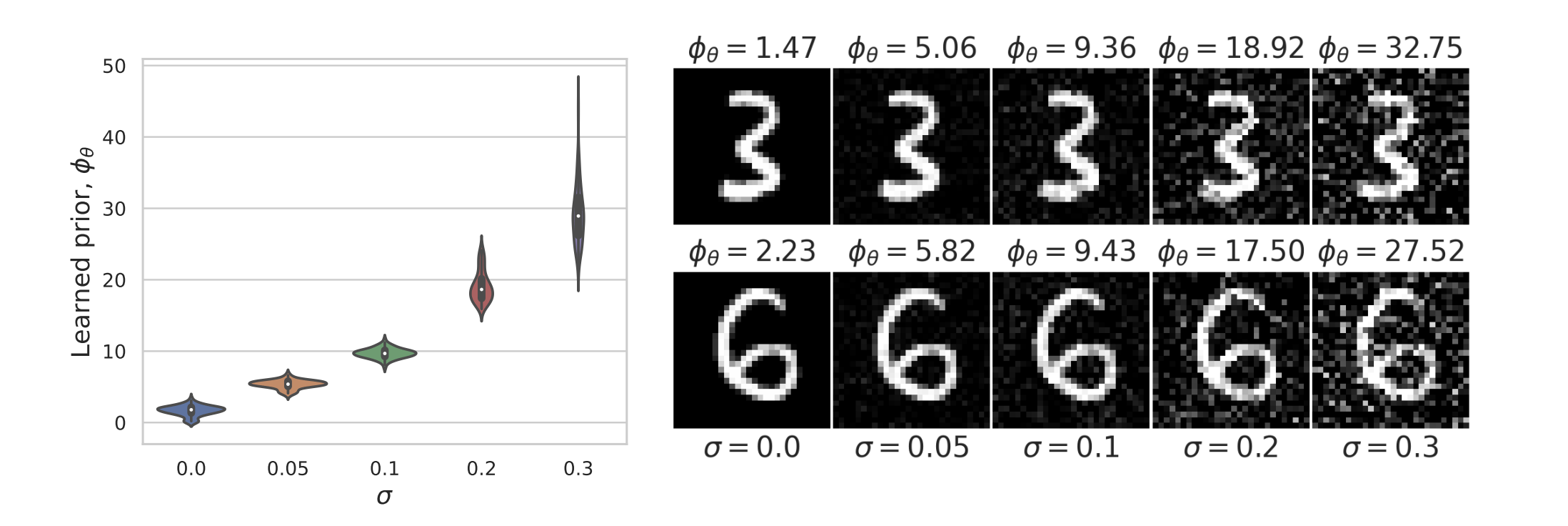
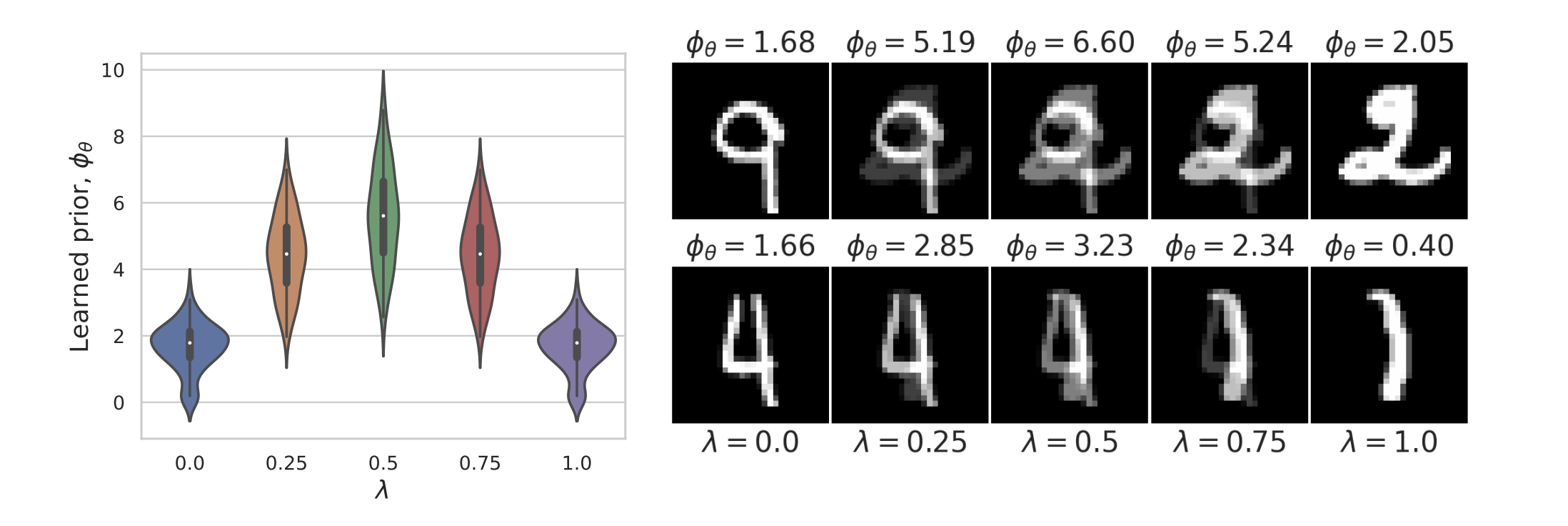
Learned Proximal Networks
\text{Sample } y = x+v,~ \text{ with } x \sim \text{Laplace}(0,1) \text{ and } v \sim \mathcal N(0,\sigma^2)
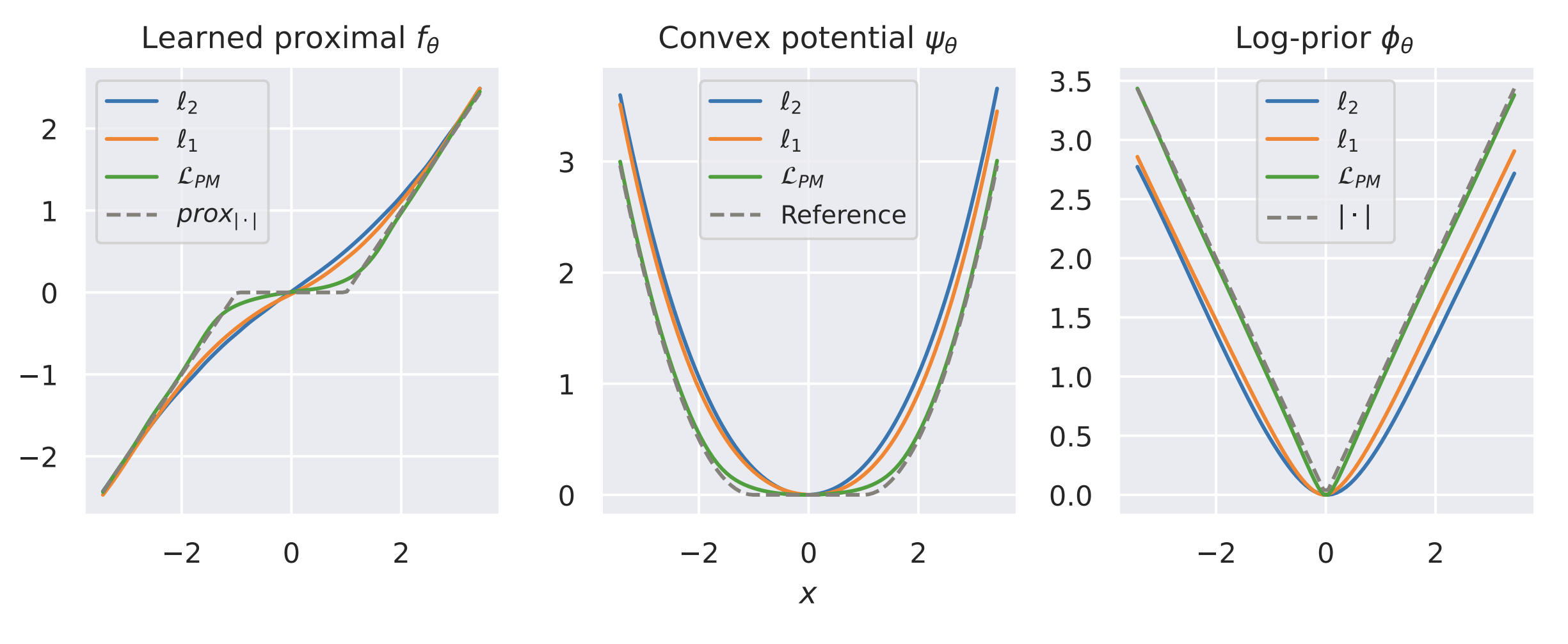
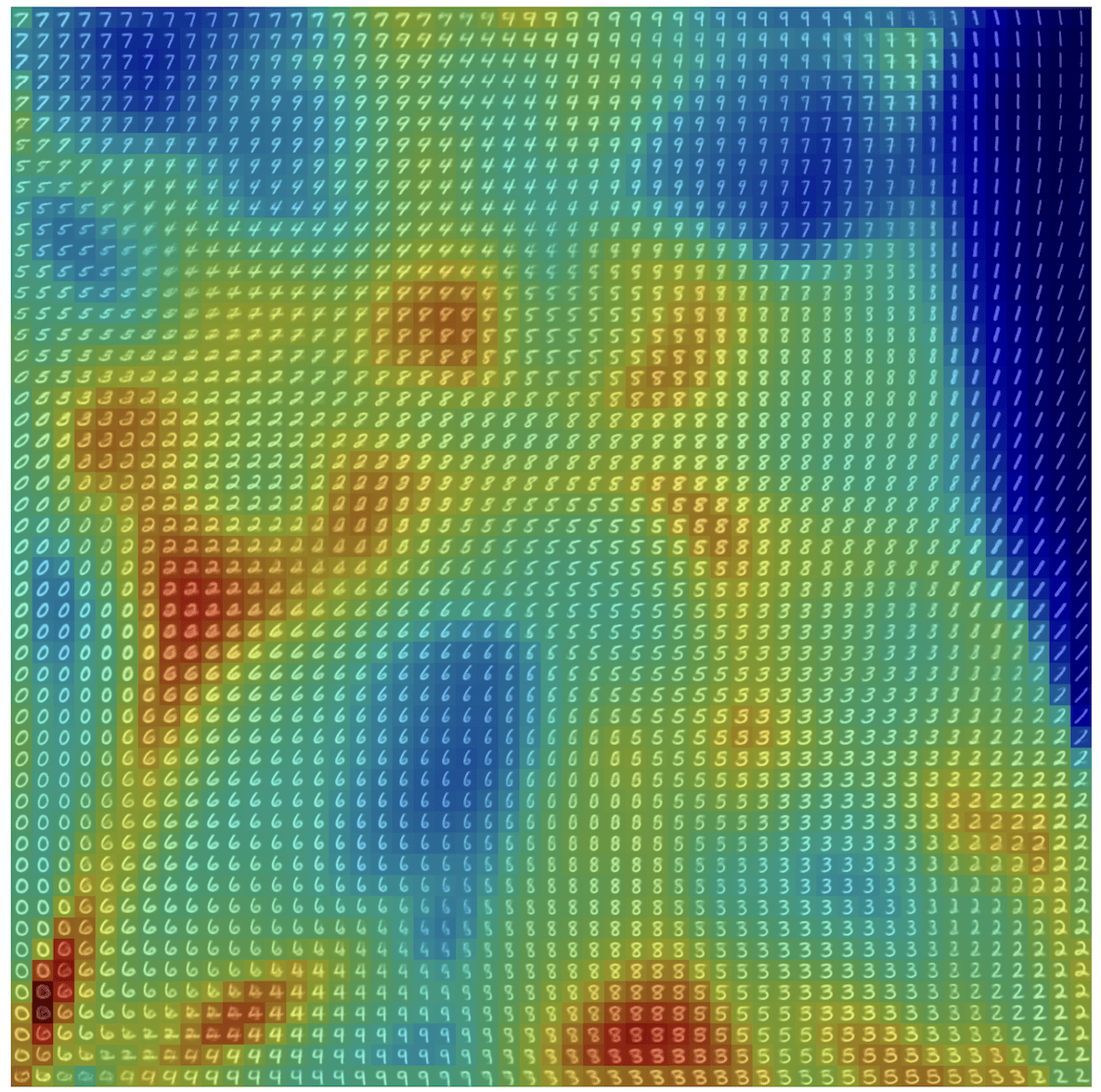
Example 1: recovering a prior
Fang, Buchanan & S. What's in a Prior? Learned Proximal Networks for Inverse Problems, ICLR 2024.
Learned Proximal Networks
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}_\theta(x)
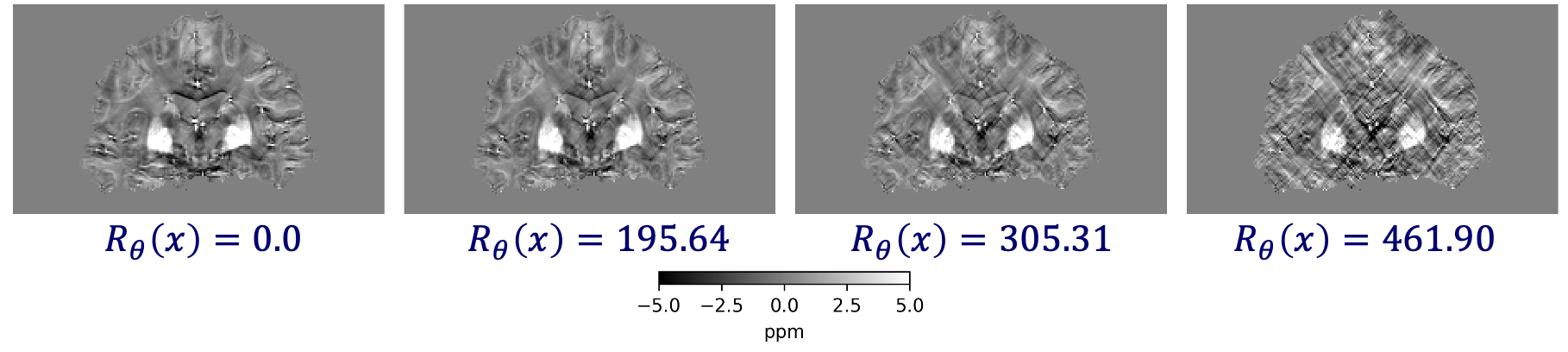
\(R_\theta(x) = 0.0\)
\(R_\theta(x) = 127.37\)
\(R_\theta(x) = 274.13\)
\(R_\theta(x) = 290.45\)
Convergence guarantees
Mathematical tractability vs Complexity
in a box
simpler models
more assumptions
any model
no assumptions
Denoiser
Linear models
Linear networks
Shallow
ReLU Networks
PnP
Just ask GPT
Learned Proximals
Conformal guarantees for diffusion models
in a box
Denoiser
diffusion
Measurements
\[y = Ax + \epsilon,~\epsilon \sim \mathcal{N}(0, \sigma^2\mathbb{I})\]
\[\hat{x} = F(y) \sim \mathcal{P}_y\]
Hopefully \(\mathcal{P}_y \approx p(x \mid y)\), but not needed!

Reconstruction
Question 3)
How much uncertainty is there in the samples \(\hat x \sim \mathcal P_y?\)
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?
Conformal guarantees for diffusion models
Lemma
Given \(m\) samples from \(\mathcal P_y\), let
\[\mathcal{I}(y)_j = \left[ Q_{y_j}\left(\frac{\lfloor(m+1)\alpha/2\rfloor}{m}\right), Q_{y_j}\left(\frac{\lceil(m+1)(1-\alpha/2)\rceil}{m}\right)\right]\]
Then \(\mathcal I(y)\) provides entriwise coverage for a new sample \(\hat x \sim \mathcal P_y\), i.e.
\[\mathbb{P}\left[\hat{x}_j \in \mathcal{I}(y)_j\right] \geq 1 - \alpha\]
\(0\)
\(1\)
low: \( l(y) \)
\(\mathcal{I}(y)\)
up: \( u(y) \)
Question 3)
How much uncertainty is there in the samples \(\hat x \sim \mathcal P_y?\)
(distribution free)
cf [Feldman, Bates, Romano, 2023]

\(y\)
lower
upper
intervals
\(|\mathcal I(y)_j|\)
Conformal guarantees for diffusion models
\(0\)
\(1\)
ground-truth is
contained
\(\mathcal{I}(y_j)\)
\(x_j\)
Conformal guarantees for diffusion models
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?
Conformal guarantees for diffusion models
[Angelopoulos et al, 2022]
[Angelopoulos et al, 2022]
Risk Controlling Prediction Set
For risk level \(\epsilon\), failure probability \(\delta\), \(\mathcal{I}(y_j) \) is a RCPS if
\[\mathbb{P}\left[\mathbb{E}\left[\text{fraction of pixels not in intervals}\right] \leq \epsilon\right] \geq 1 - \delta\]
[Angelopoulos et al, 2022]
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?
\(0\)
\(1\)
ground-truth is
contained
\(\mathcal{I}(y_j)\)
\(x_j\)
Conformal guarantees for diffusion models
[Angelopoulos et al, 2022]
ground-truth is
contained
\(0\)
\(1\)
\(\mathcal{I}(y_j)\)
\(\lambda\)
\(x_j\)
Procedure:
\[\hat{\lambda} = \inf\{\lambda \in \mathbb{R}:~ \hat{\text{risk}}_{(\mathcal S_{cal})} \leq \epsilon,~\forall \lambda' \geq \lambda \}\]
[Angelopoulos et al, 2022]
single \(\lambda\) for all \(\mathcal I(y_j)\)!
Risk Controlling Prediction Set
For risk level \(\epsilon\), failure probability \(\delta\), \(\mathcal{I}(y_j) \) is a RCPS if
\[\mathbb{P}\left[\mathbb{E}\left[\text{fraction of pixels not in intervals}\right] \leq \epsilon\right] \geq 1 - \delta\]
[Angelopoulos et al, 2022]
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?
\(\mathcal{I}_{\bm{\lambda}}(y)_j = [l_\text{low,j} - \lambda, l_\text{up,j} + \lambda]\)
Conformal guarantees for diffusion models
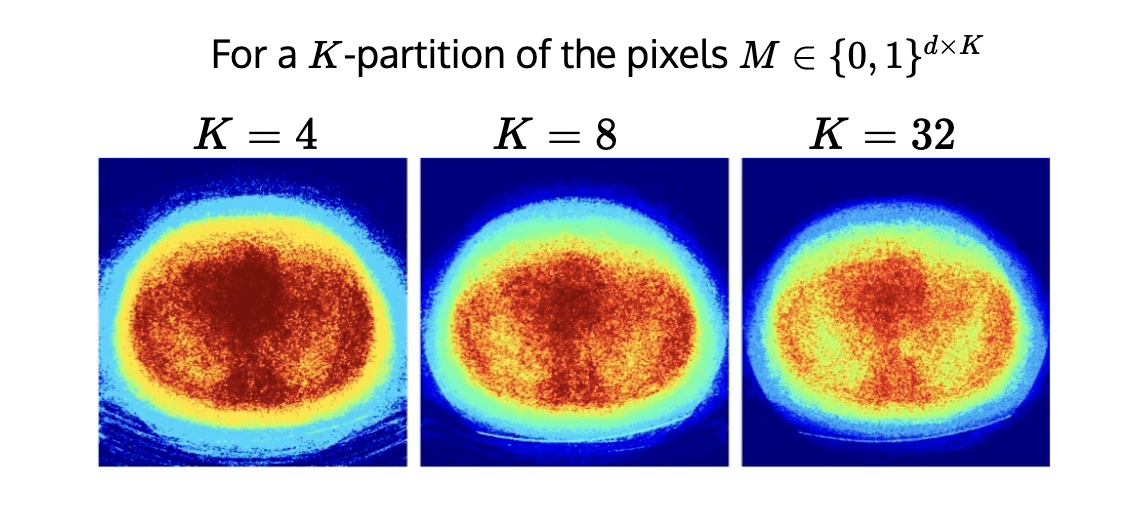
\(K\)-RCPS: High-dimensional Risk Control
\[\tilde{{\lambda}}_K = \underset{\lambda \in \mathbb R^K}{\arg\min}~\sum_{k \in [K]}\lambda_k~\quad \text{s.t. }\quad \mathcal I_{\lambda_j}(y) : \text{RCPS}\]
scalar \(\lambda \in \mathbb{R}\)
vector \(\bm{\lambda} \in \mathbb{R}^d\)
\(\mathcal{I}_{\lambda}(y)_j = [\text{low}_j - \lambda, \text{up}_j + \lambda]\)
\(\mathcal{I}_{\bm{\lambda}}(y)_j = [\text{low}_j - \lambda_j, \text{up}_j + \lambda_j]\)
\(\rightarrow\)
\(\rightarrow\)
Procedure:
1. Find anchor point
\[\tilde{\bm{\lambda}}_K = \underset{\bm{\lambda}}{\arg\min}~\sum_{k \in [K]}\lambda_k~\quad\text{s.t.}~~~\hat{\text{risk}}^+(\bm{\lambda})_{(S_{opt})} \leq \epsilon\]
2. Choose
\[\hat{\beta} = \inf\{\beta \in \mathbb{R}:~\hat{\text{risk}}_{S_{cal}}^+(\tilde{\bm{\lambda}}_K + \beta'\bf{1}) \leq \epsilon,~\forall~ \beta' \geq \beta\}\]
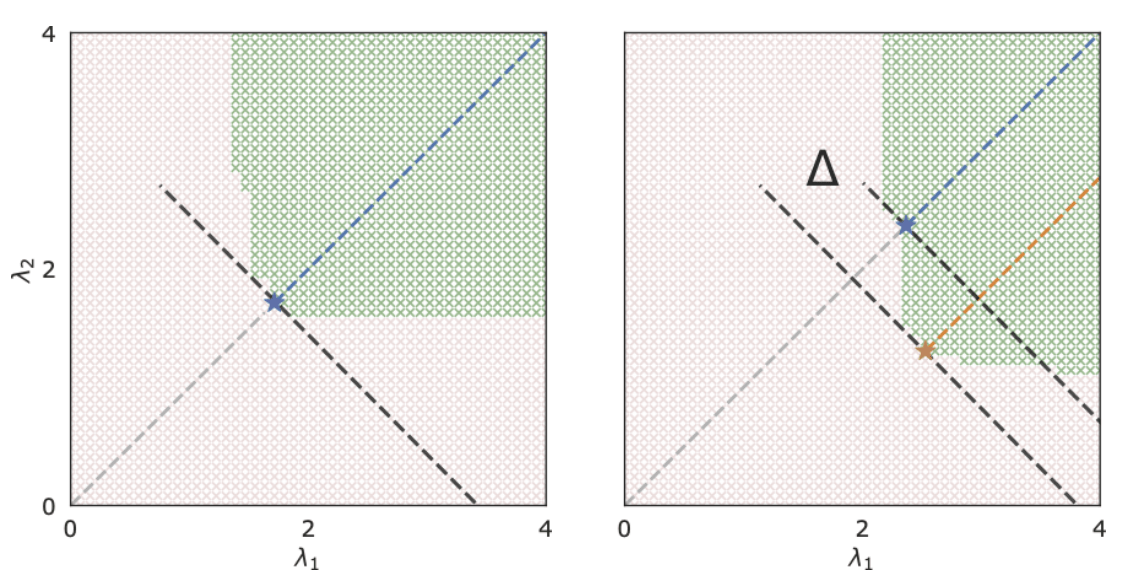
\(\tilde{\bm{\lambda}}_K\)
Conformal guarantees for diffusion models
\(K\)-RCPS: High-dimensional Risk Control
\[\tilde{{\lambda}}_K = \underset{\lambda \in \mathbb R^K}{\arg\min}~\sum_{k \in [K]}\lambda_k~\quad \text{s.t. }\quad \mathcal I_{\lambda_j}(y) : \text{RCPS}\]
scalar \(\lambda \in \mathbb{R}\)
vector \(\bm{\lambda} \in \mathbb{R}^d\)
\(\rightarrow\)
\(\rightarrow\)
Procedure:
1. Find anchor point
\[\tilde{\bm{\lambda}}_K = \underset{\bm{\lambda}}{\arg\min}~\sum_{k \in [K]}\lambda_k~\quad\text{s.t.}~~~\hat{\text{risk}}^+(\bm{\lambda})_{(S_{opt})} \leq \epsilon\]
2. Choose
\[\hat{\beta} = \inf\{\beta \in \mathbb{R}:~\hat{\text{risk}}_{S_{cal}}^+(\tilde{\bm{\lambda}}_K + \beta'\bf{1}) \leq \epsilon,~\forall~ \beta' \geq \beta\}\]
\(\hat{R}^{\gamma}(\bm{\lambda}_{S_{opt}})\leq \epsilon\)
Guarantee: \(\mathcal{I}_{\bm{\lambda}_K,\hat{\beta}}(y)_j \) are \((\epsilon,\delta)\)-RCPS
\(\tilde{\bm{\lambda}}_K\)
\(\mathcal{I}_{\lambda}(y)_j = [\text{low}_j - \lambda, \text{up}_j + \lambda]\)
\(\mathcal{I}_{\bm{\lambda}}(y)_j = [\text{low}_j - \lambda_j, \text{up}_j + \lambda_j]\)

\(\hat{\lambda}_K\)
conformalized uncertainty maps
\(K=4\)
\(K=8\)
\[\mathbb{P}\left[\mathbb{E}\left[\text{fraction of pixels not in intervals}\right] \leq \epsilon\right] \geq 1 - \delta\]
Conformal guarantees for diffusion models
c.f. [Kiyani et al, 2024]
Teneggi, Tivnan, Stayman, S. How to trust your diffusion model: A convex optimization approach to conformal risk control. ICML 2023
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\), and for what \(R(x)\)?
Gradients of ICNN, and computable \(R(x)\)
Question 2)
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct"
\(R(x) \propto -\log p_x(x)\)?
Use proximal matching loss
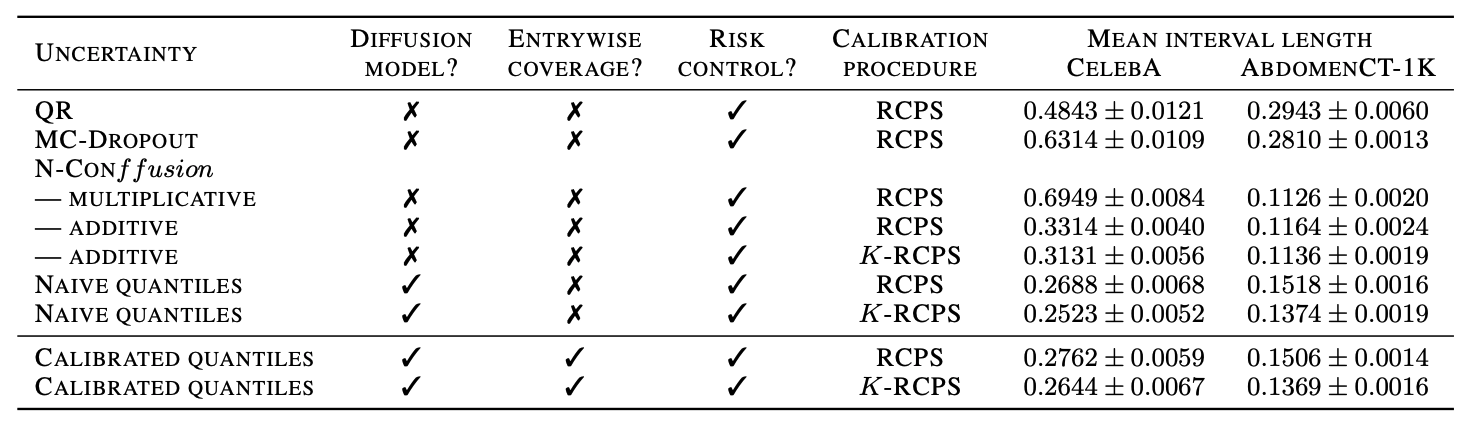
Calibrated quantiles
Question 3)
How much uncertainty is there in the samples \(\hat x \sim \mathcal P_y?\)
Use K-RCPS to conformalize
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\), and for what \(R(x)\)?
Gradients of ICNN, and computable \(R(x)\)
Question 2)
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct"
\(R(x) \propto -\log p_x(x)\)?
Use proximal matching loss
Calibrated quantiles
Question 3)
How much uncertainty is there in the samples \(\hat x \sim \mathcal P_y?\)
Use K-RCPS to conformalize
Question 4)
How far will the samples \(\hat x \sim \mathcal P_y\) be from the true \(x\)?




...that's it!



Zhenghan Fang
JHU
Jacopo Teneggi
JHU
Sam Buchanan
TTIC

Learned Proximal Networks
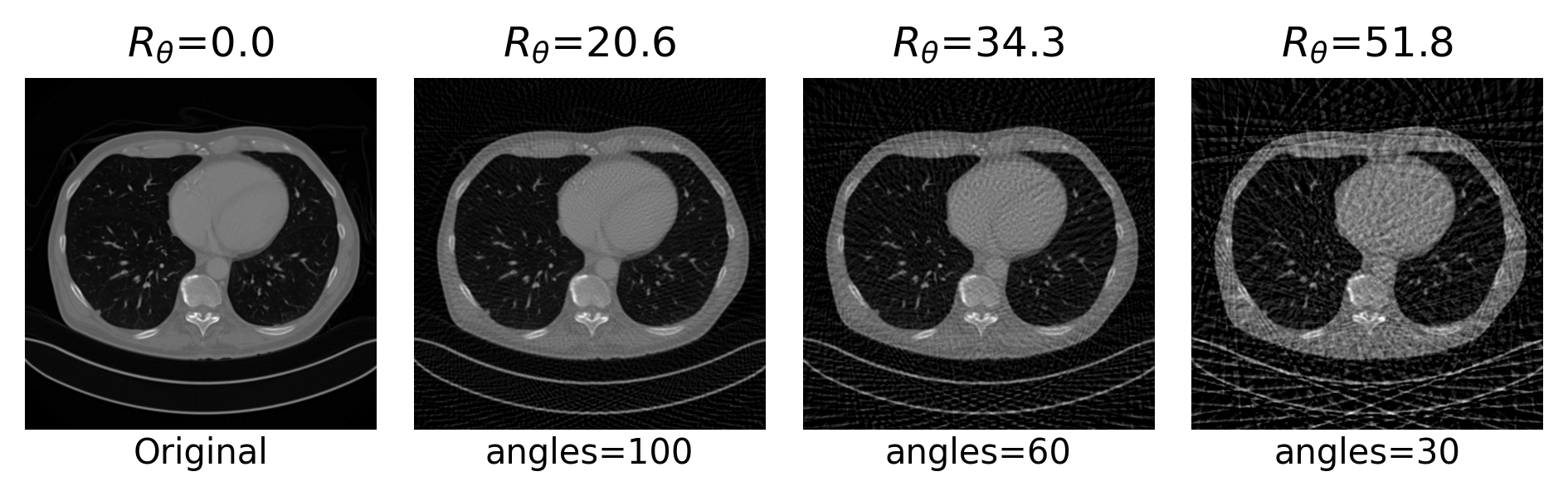
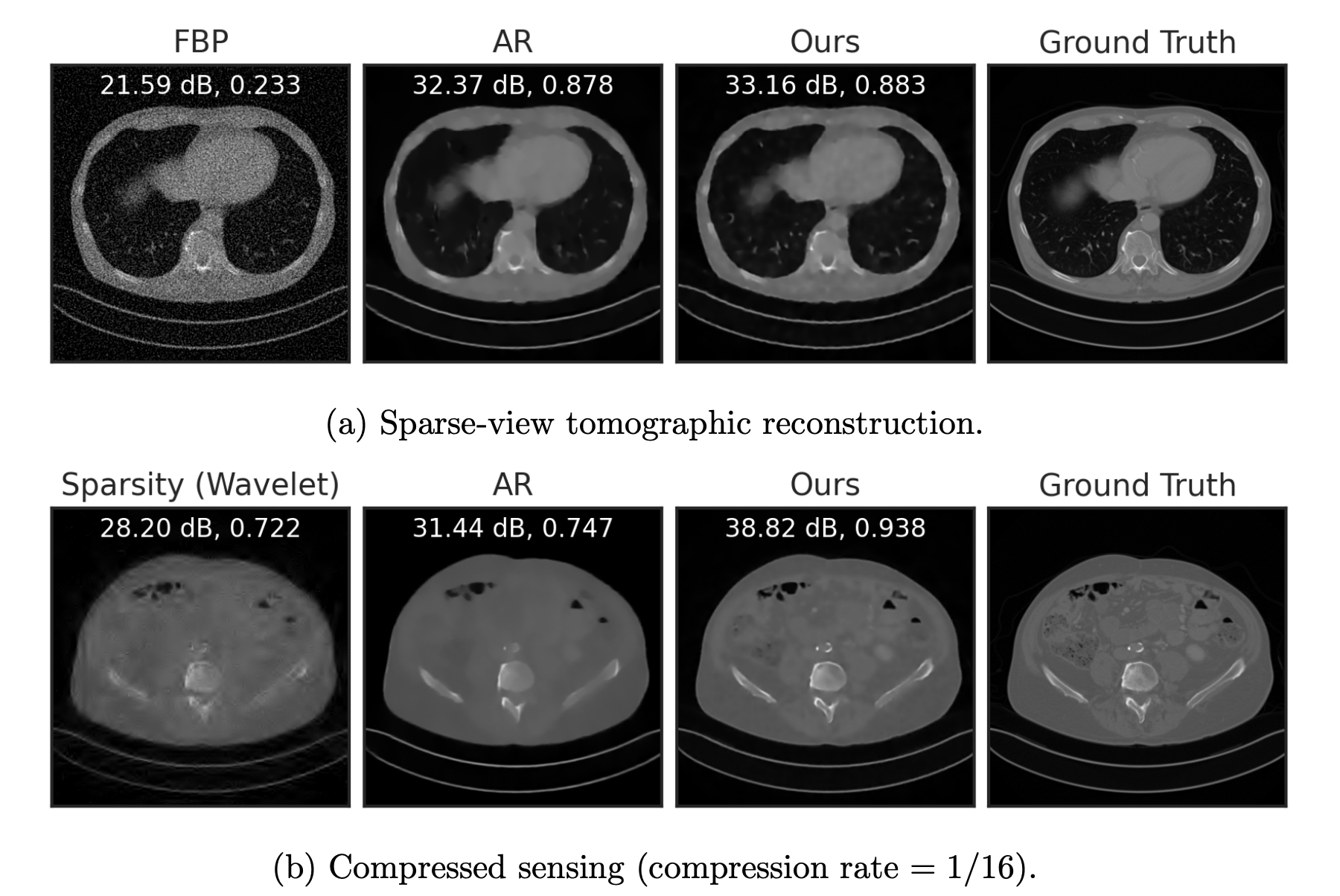
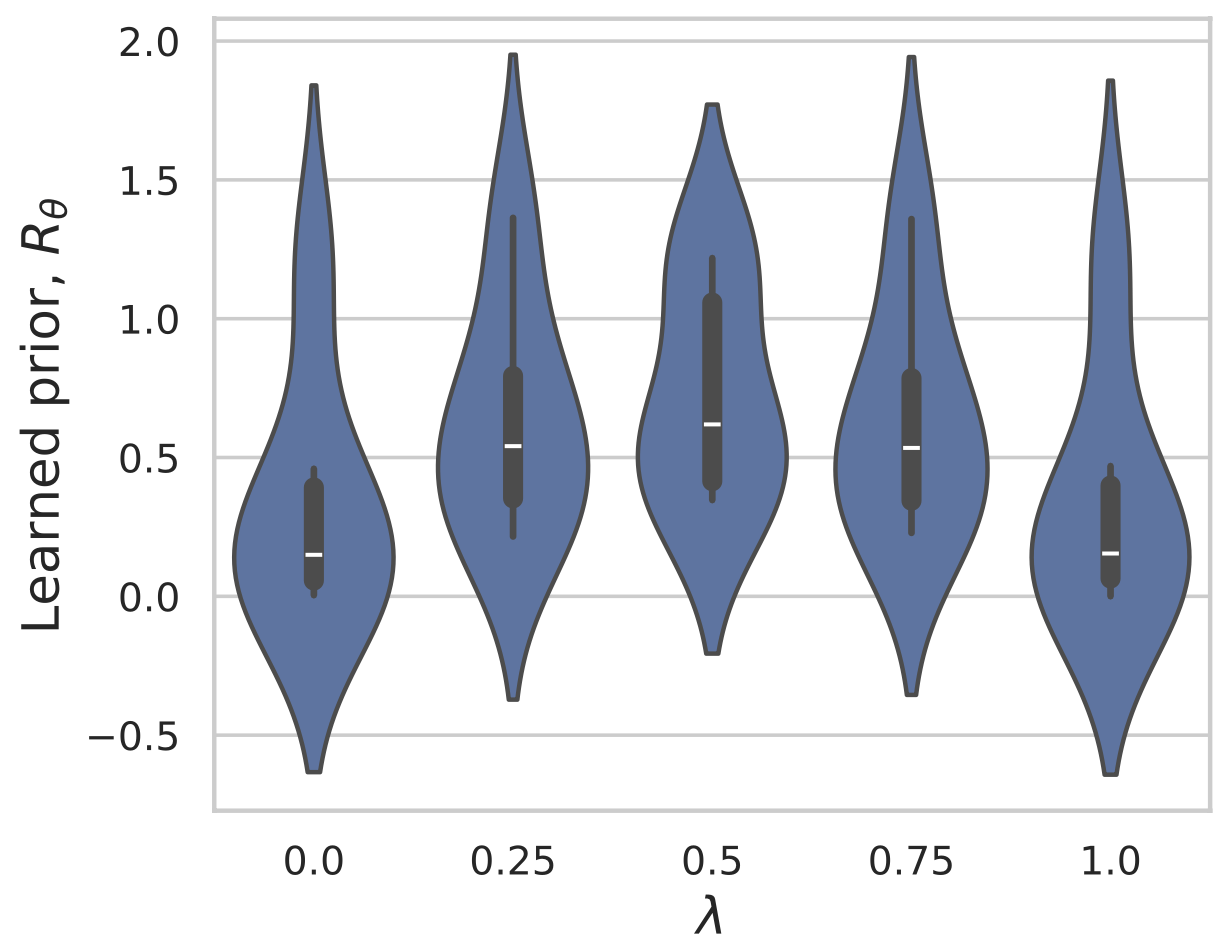
Example 2: a prior for CT
Learned Proximal Networks
Example 2: a prior for CT
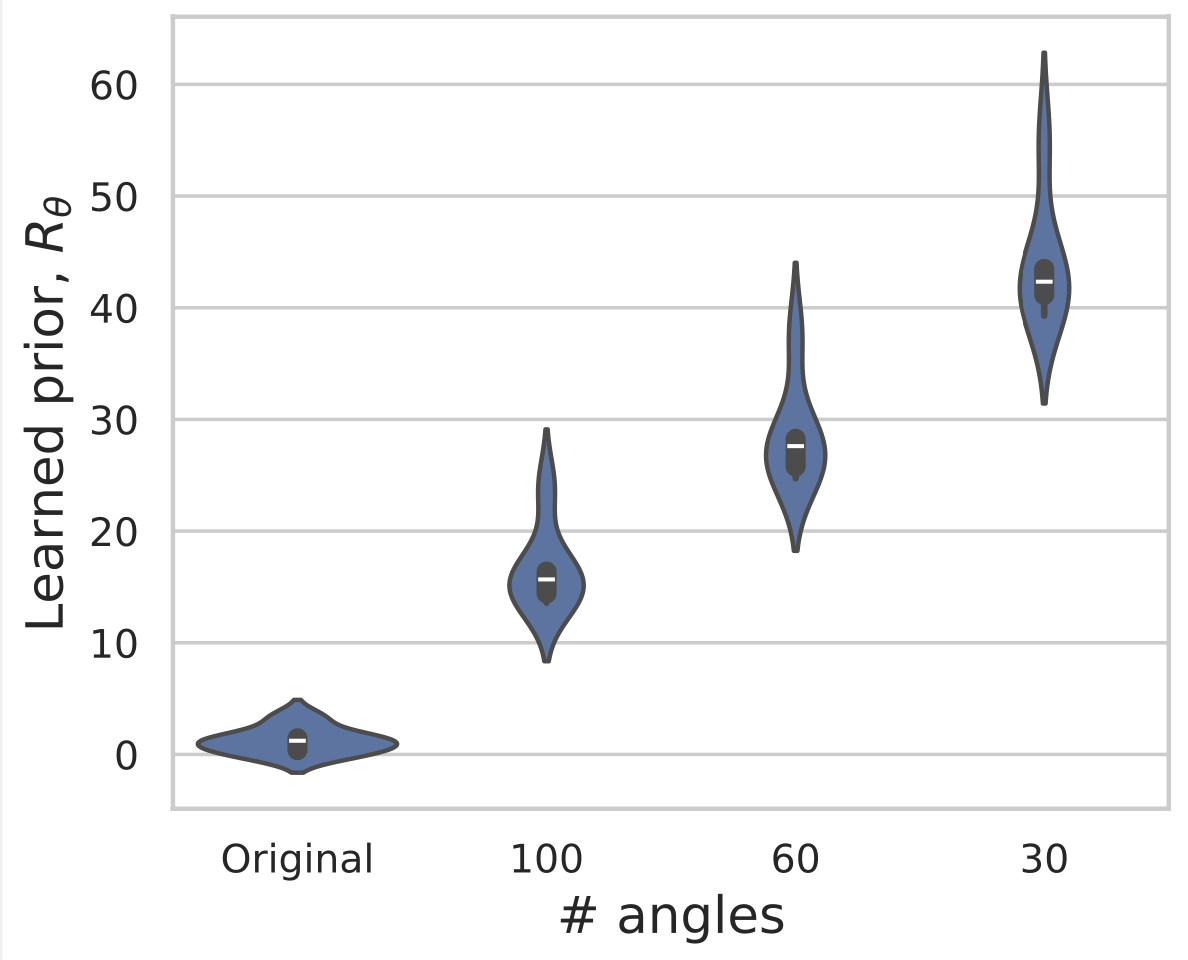
Learned Proximal Networks
Example 2: a prior for CT
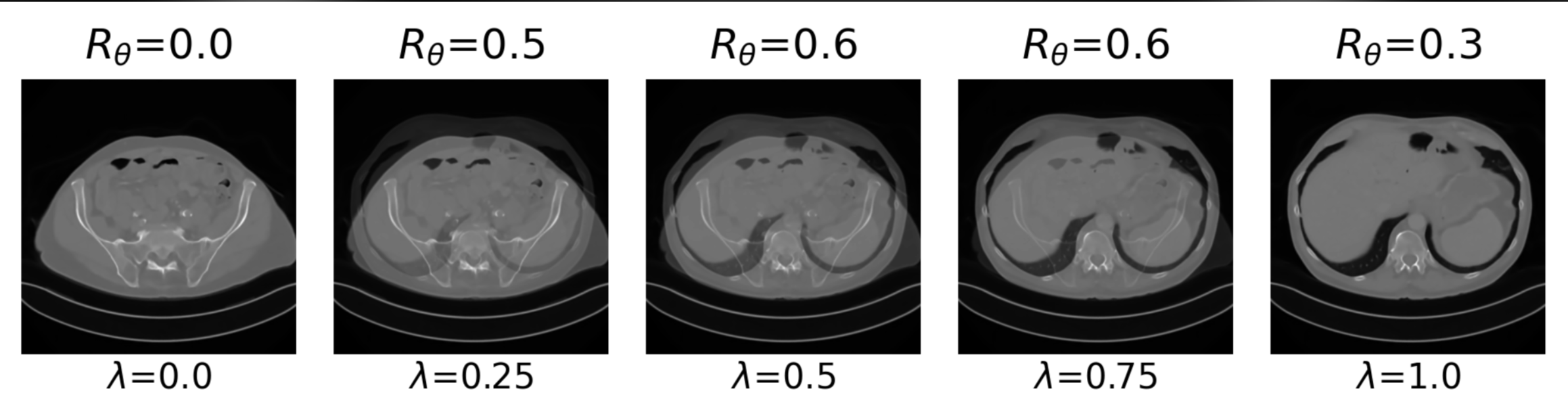
Learned Proximal Networks
Example 2: a prior for CT
Learned Proximal Networks
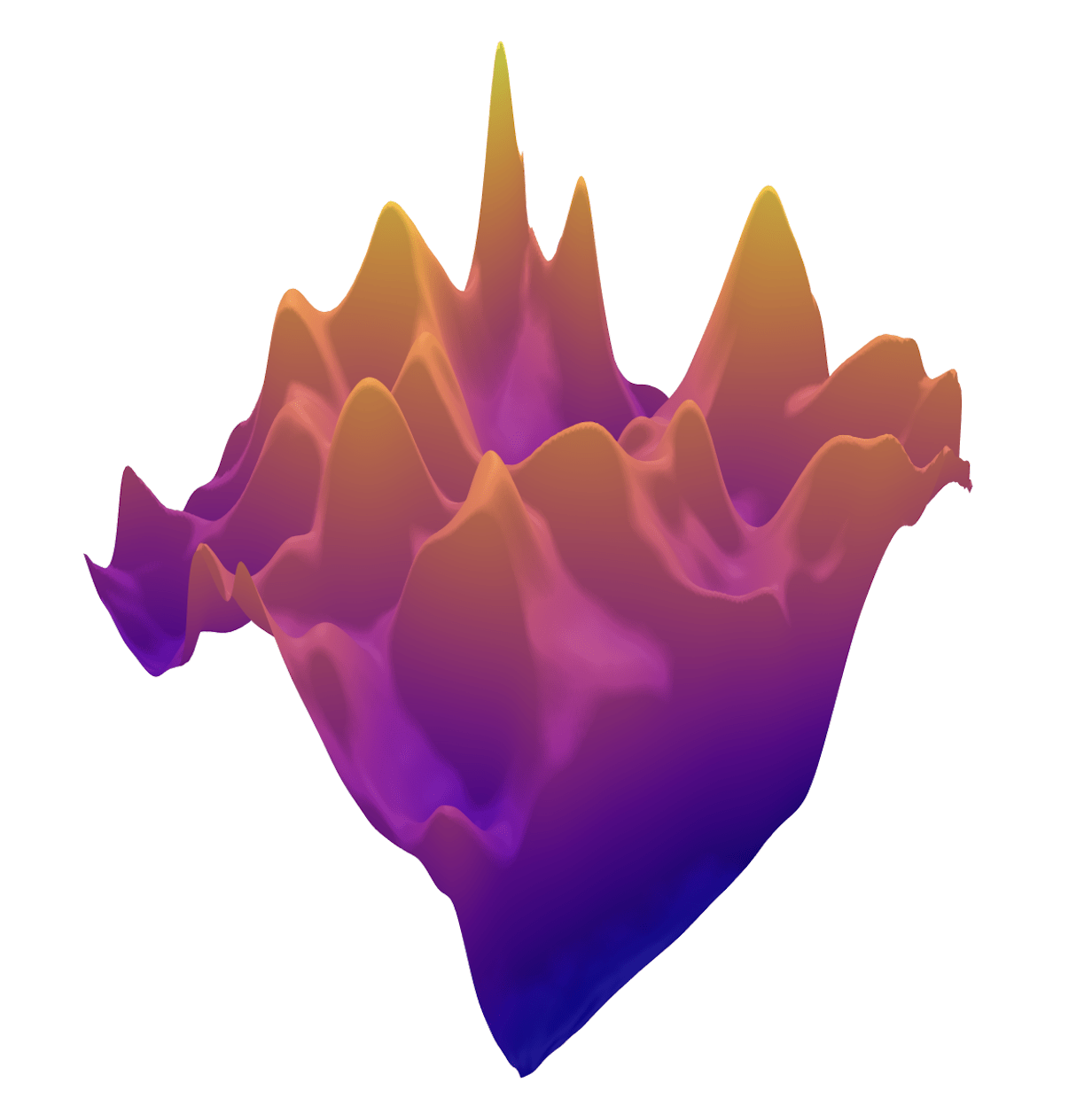
\(R(\tilde{x})\)
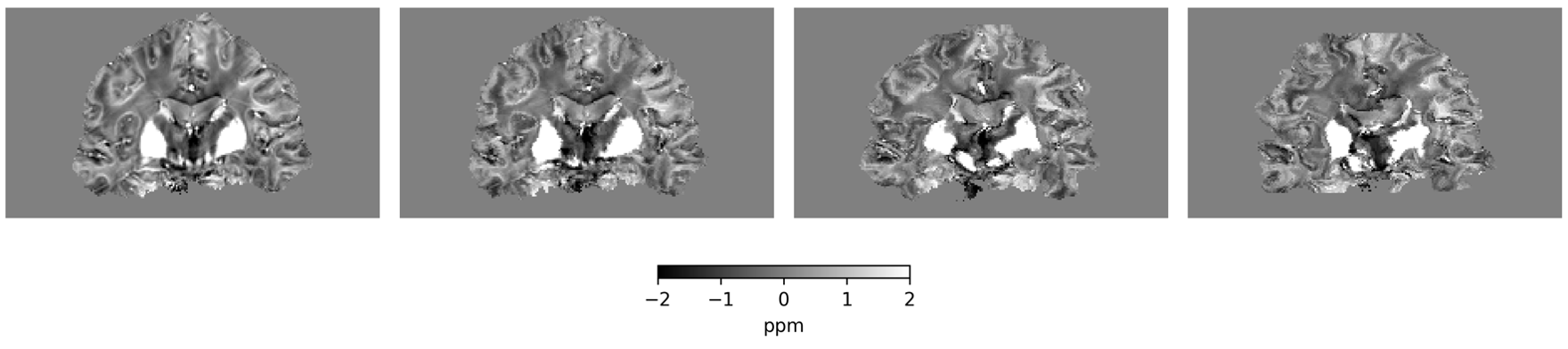
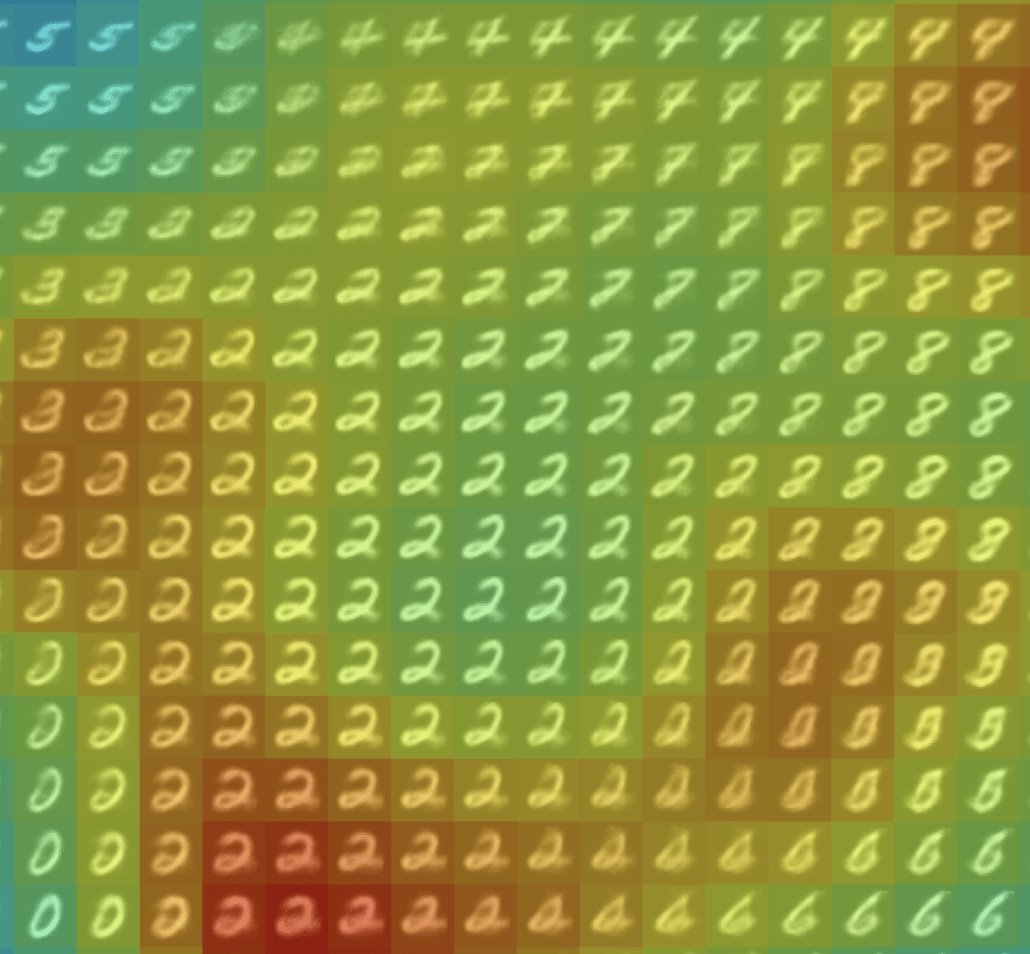
Example 2: priors for images
Learned Proximal Networks
Example 2: priors for images
x^{t+1} = \text{prox}_{\hat R} \left(x^t - \eta A^T(Ax^t - y)\right)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Learned Proximal Networks
via
Convergence Guarantees
Theorem (PGD with Learned Proximal Networks)
x^{t+1} = \text{prox}_{\hat R} \left(x^t - \eta A^T(Ax^t - y)\right)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Let \(f_\theta = \text{prox}_{\hat{R}} {\color{grey}\text{ with } \alpha>0}, \text{ and } 0<\eta<1/\sigma_{\max}(A) \) with smooth activations
\text{Then } \exists x^* : \lim_{k\to\infty} x^t = x^* \text{ and }
f_\theta(x^* - \eta A^T(Ax^*-y)) = x^*
(Analogous results hold for ADMM)
Learned Proximal Networks
Convergence guarantees for PnP
Black box guarantees for modern methods in inverse problems
By Jeremias Sulam




