






Klas Modin PRO
Mathematician at Chalmers University of Technology and the University of Gothenburg
Euler's equations describe Riemannian geodesics on
"Right-invariant" Riemannian metric determined by inner product on \(\mathfrak{g}\)
\(G\)
\(T_eG\simeq\mathfrak g\)
Euler-Arnold
(Lie-Poisson)
Euler-Lagrange
Yudovich
Inner product: moments of inertia tensor \(\mathbb{I}\)
Inner product:
Arnold's theorem: \(\gamma(t)\in \operatorname{Diff}_\mu(M)\) geodesic curve \(\Rightarrow\) vector field \(v(t) = \dot\gamma(t)\circ\gamma(t)^{-1}\) fulfills Euler's equations
Thm [Palais, Omori, Ebin, Ebin and Marsden]
\(\operatorname{Diff}^s(M)\) is smooth Hilbert manifold if \(s>\operatorname{dim}(M)/2+1\)
\(\operatorname{Diff}^s_\mu(M)\) is a submanifold
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
Use Fréchet manifolds instead
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
Use Fréchet manifolds instead
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
Use Fréchet manifolds instead
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
So, let's work only with right translation
Camassa-Holm equation
Idea: [Ebin and Marsden] maybe geodesic equation on \(T\operatorname{Diff}^s(S^1)\) is an ODE
No! RHS must be smooth as function of \( \varphi,\dot\varphi\) but \(v=\dot\varphi\circ\varphi^{-1}\)
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Proof:
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Thm: Spray \(T\operatorname{Diff}^s(S^1)\to T^{s-2}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto \tilde A^{-1}_\varphi (\tilde B_\varphi(\dot\varphi,\dot\varphi)) \] is smooth
\((M,\Omega)\) symplectic
\(v=X_\psi\) for Hamiltonian \(\psi\)
Change of coordinates: \( \psi \leftrightarrow X_\psi\)
| Lie bracket | ||
| Kinetic energy |
\(L^2\)
\(H^{-1}\)
?
?
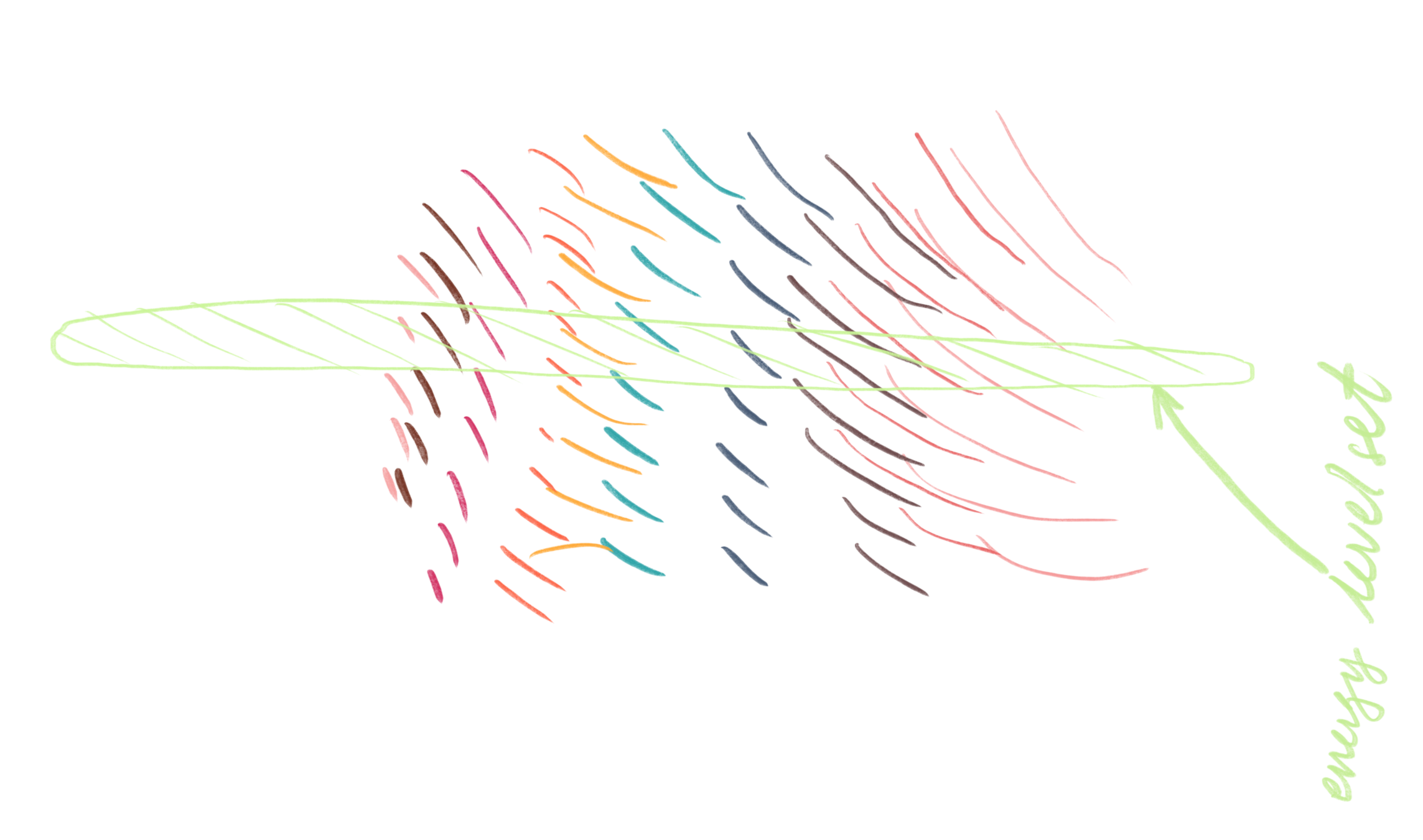
level-sets of \(\omega\)
Restriction to smooth dual: \(C^\infty(M)\subset\mathfrak{g}^*\) via \(L^2\) pairing
Casimir functions: \( \mathcal C_f(\omega) = \int_{S^2}f(\omega)\)
Finite-dim (weak) orbits: \(\omega = \sum_{k=1}^N \Gamma_k \delta_{x_k} \)
Consequence: 2-D Euler richer geometric structure than 3-D
Yudovich formulation:
Vorticity formulation:
Yudovich is weaker: \(\omega_0 \in L^\infty\) enough
Fixed-point iteration over \(v,\Phi,\omega\):
\(L^\infty\) global existence
Idea by Onsager (1949):
Hamiltonian function:
Idea by Onsager (1949):
Hamiltonian function:
Onsager's observation:
Pos. and neg. strengths \(\Rightarrow\) energy takes values \(-\infty\) to \(\infty\)
Idea by Onsager (1949):
Hamiltonian function:
Onsager's observation:
Pos. and neg. strengths \(\Rightarrow\) energy takes values \(-\infty\) to \(\infty\)
\(\Rightarrow\) phase volume function \(\mathrm{vol}(E)\) has inflection point
Idea by Onsager (1949):
Hamiltonian function:
Observation: large scale motion quasiperiodic
Assumptions for new mechanism:
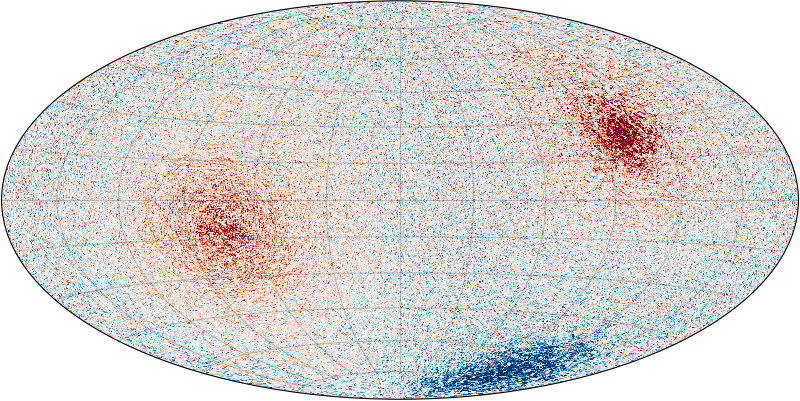
For "generic" \(\omega_0\), what is the typical long-time behaviour?
More precise (Shnirelman 1993):
What is contained in \(\Omega_+(\omega_0)\) ?
Related (Sverak 2011): generic trajectories
are not \(L^2\) precompact ( \(\simeq\) enstrophy cascade )
Vladimir Zeitlin
Classical
Quantized
What is \(\Delta_N\) and how to compute \(\Delta_N^{-1}W\) ?
Note: corresponds to
\(N^2\) spherical harmonics
\(O(N^2)\) operations
\(O(N^3)\) operations
Isospectral flow \(\Rightarrow\) discrete Casimirs
By Klas Modin
Mini-course given in Santiago de Compostela in September 2023.




