







Klas Modin PRO
Mathematician at Chalmers University of Technology and the University of Gothenburg
Sinkhorn
algorithm
Geometric hydrodynamics
Heat flow
Otto's calculus
Quantum mechanics
\(p,q \in \mathbb{R}_+^N\) with \(\sum_i p_i=\sum_i q_i = 1\)
find coupling matrix \(\gamma\in \mathbb{R}_+^{N\times N} \) minimizing
under the constraint
Relative entropy \(\mathcal H(\gamma\mid K) = \sum_{ij}\gamma_{ij}\log(\gamma_{ij}/K_{ij})\)
Entropic regularization: find coupling matrix \(\gamma\in \mathbb{R}_+^{N\times N} \) minimizing
under the same constraint
(Sinkhorn's theorem)
[Benamou & Brenier 2000]
Idea: transport map obtained through compressible fluid
Lagrangian for density \(\rho(t,x)\) and vector field \(v(t,x)\)
under constraints \(\rho(0,\cdot)=\rho_0,\; \rho(1,\cdot)=\rho_1,\; \)
Wasserstein-Otto Riemannian metric on \(\mathrm{Diff}(M)\)
\(\dot\rho + \mathrm{div}(\rho v) = 0\)
\(\dot\rho + \mathrm{div}(m) = 0\)
Hamiltonian formulation is convex
Hamilton's equations for horizontal momentum \(m=\rho\nabla S\)
transport equation for \(v=\nabla S\)
Hamilton-Jacobi equation
\(L^2\) optimal transport corresponds to BVP for Hamiltonian system on \(T^*\mathrm{Dens}(M)\)
with bc \(\rho(0,\cdot) = \rho_0\) and \(\rho(1,\cdot) = \rho_1\)
Hamiltonian is \(H(\rho,S) = \int_M \frac{1}{2}|\nabla S|^2\rho\)
Dynamical formulation corresponding to the Sinkhorn algorihm
\(\Rightarrow\) Sinkhorn algorithm as space and time discretization of inf. dim. flow equation
\(L^2\) OT Hamiltonian
Theorem: Madelung transform
is a symplectomorphism
perturbed by Fisher information potential
... gives Schrödinger Hamiltonian \(H(\psi) = \frac{\hbar^2}{2} \Vert \nabla\psi \Vert^2\)
\(L^2\) OT Hamiltonian
Theorem: Madelung-Hopf-Cole transform
perturbed by Fisher information potential
Heat flow forward and
backward in time!
Important observations: \(\psi_+\psi_- = \rho\) and \(\epsilon\nabla\log(\psi_-/\psi_+) = \nabla S\)
is a symplectomorphism w.r.t. \(D\psi_+\wedge D\psi_-\)
Minimize perturbed (but still convex) functional
under constraints \(\rho(0,\cdot)=\rho_0,\; \rho(1,\cdot)=\rho_1,\; \)
\(\dot\rho + \mathrm{div}(m) = 0\)
becomes "double heat flow" equation (with \(\bar\psi_-(t,\cdot) = \psi_-(1-t,\cdot)\))
\[\dot\psi_+ = \epsilon\Delta\psi_+, \quad \dot{\bar\psi}_- = \epsilon\Delta\bar\psi_- \]
coupled by bc \(\psi_+(0,\cdot)\bar\psi_-(1,\cdot) = \rho_0\) and \(\psi_+(1,\cdot)\bar\psi_-(0,\cdot) = \rho_1\)
Algebraic formulation in terms of heat kernel \(\mathrm{e}^{\epsilon\Delta}\)
with \(a=\psi_+(0,\cdot)\) and \(b=\psi_-(1,\cdot)\)
\( a\mathrm{e}^{\epsilon\Delta}b = \rho_0,\quad b\mathrm{e}^{\epsilon\Delta}a = \rho_1\)
\( a_{k+1}\mathrm{e}^{\epsilon\Delta}b_k = \rho_0,\quad b_{k+1}\mathrm{e}^{\epsilon\Delta}a_{k+1} = \rho_1\)
Fixed-point iteration over \(a\) \(\Rightarrow\) Sinkhorn algorithm
Convex functional on \(C^\infty([0,1]\times M,\mathbb{R}_+)^3\)
(entropy of \(\psi_+\psi_-\) relative to \(\rho\))
under linear constraints \(\dot\psi_{\pm} = \pm\epsilon\Delta\psi_\pm\)
Change of variables
Observation: smooth ODE on Banach space \(X\)
For example (\(M\) compact):
Consequence: local well-posedness automatic (Picard iterations)
Conjecture: global existence due to maximum principle
Stepsize \(h>0\)
Original variables \(a,b\) and \(h=1\) gives
\(h=1\) gives Sinkhorn before spatial discretization!
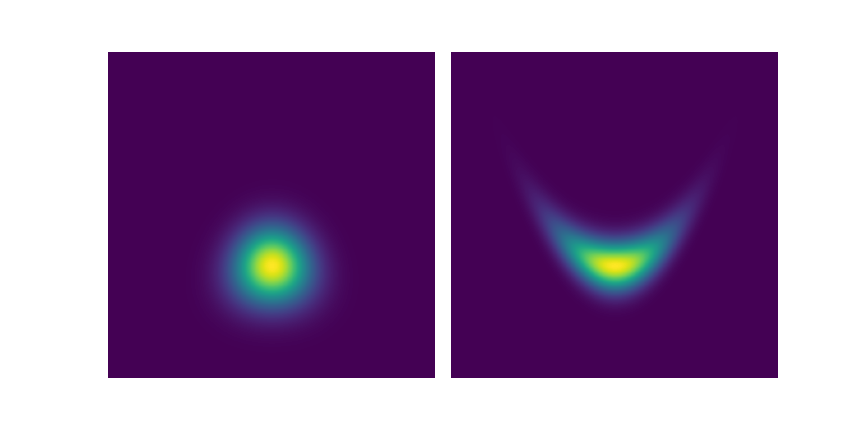
I use \(\epsilon = 0.01\)
I use \(\epsilon = 0.01\)
\(t=0\)
\(t=1\)
\(t=0\)
\(t=1\)
Transport map is a diffeomorphism
Can we understand this?
Test equation
Euler's method
Test equation
Euler's method
Sinkhorn equation with \(\epsilon=0\) (first part in splitting)
Euler's method
Euler's method
Sinkhorn equation with \(\epsilon=0\) (first part in splitting)
Sinkhorn equation with \(\epsilon=0\)
Euler's method
explains initial transient
Sinkhorn equation with \(\epsilon=0\)
Euler's method
problem
Sinkhorn equation with \(\epsilon>0\)
Euler's method
because of maximum principle
Sinkhorn equation with \(\epsilon>0\)
Euler's method
increasing stepsize
Sinkhorn equation with \(\epsilon>0\)
Euler's method
increasing stepsize
By Klas Modin
Presentation given 2019-06 in Duck Creek Village, Utah.



