Machine Learning
Nicholas Browning

Support Vector Machines (SVM)
Kernel Methods
Kernel Ridge Regression
Bayesian Probability Theory
Bayesian Networks
Naive Bayes
Perceptrons
Neural Networks
Principle Component Analysis
Dimensionality Reduction
Learning Theory
RDF Networks
Collaborative Filtering
Regression
GA-QMML: Prediction of Molecular Properties (QM), through Genetic Algorithm (GA) Optimisation and Non-Linear Kernel Ridge Regression (ML)
Topics of Seminar Series
Ridge Regression
-
Machine Learning introduction
-
Types of Learning
-
Supervised, Semisupervised, Unsupervised, Reinforcement
-
-
ML Applications
-
Classification, Regression, Clustering, Recommender Systems, Embedding
-
-
Theoretical Introduction: Regression
-
Bias-Variance trade-off, Overfitting, Regularization
-
Today
What is Machine Learning?
“A computer program is said to learn from experience E with respect to some task T and some performance measure P, if its performance on T, as measured by P, improves with experience E.” -- Tom Mitchell, Carnegie Mellon University
Supervised
Unsupervised
Semisupervised
Reinforcement Learning
< \vec x, f(\vec x) >
< \vec D >
< \vec x_i , f_j(\vec x_i) >
< \vec s, \vec a >
P( s' | a, s)
R(s, a, s')
Types of Machine Learning
ML Applications
From data to discrete classes
Classification

Spam Filtering

Object Detection


Weather Prediction
Medical Diagnosis
?
?
?
?
?
?
?
?
Predicting numeric value
Regression

Stock Markets
Weather Prediction
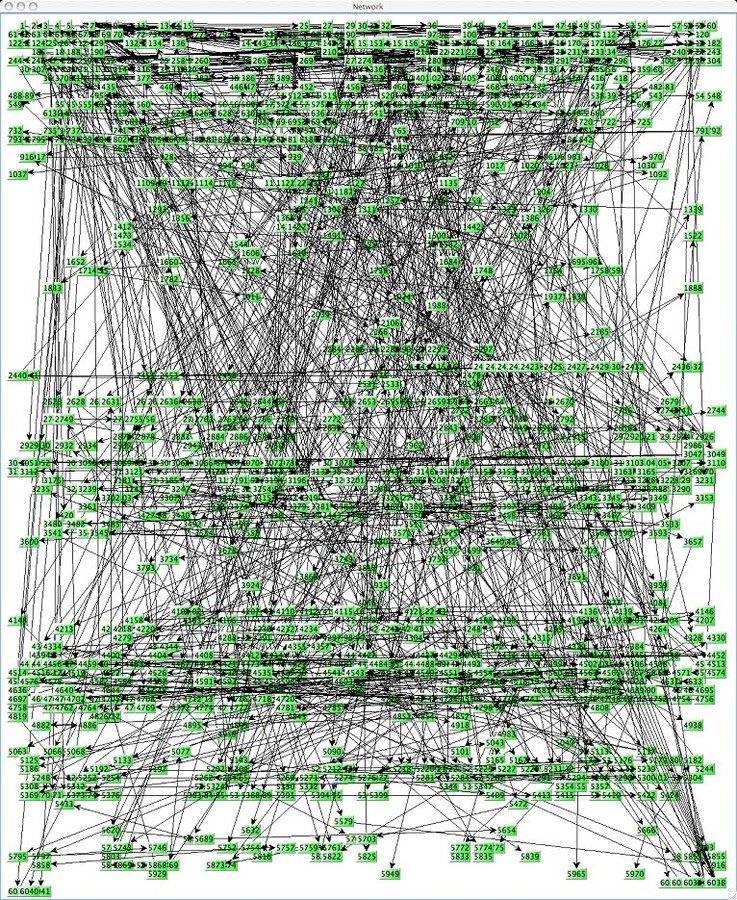
Discovering structure in data
Clustering

Natural document clusters of bio-medical research
Finding what user might want
Recommender Systems


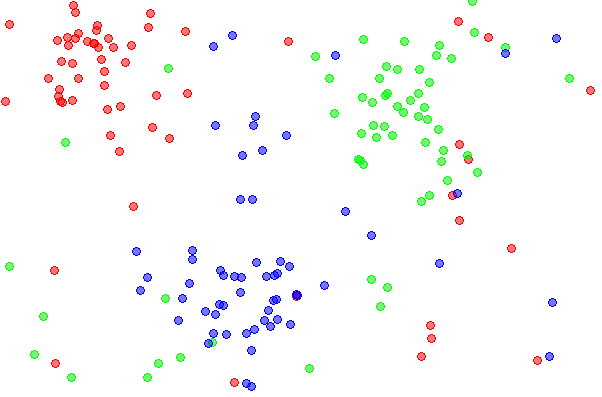
Visualising data
Embedding

Article classification via t-Distributed Stochastic Neighbor Embedding (t-SNE)

Word classification via t-SNE

Picture classification via t-SNE

LinkedIn social graph. Blue: cloud computing, Green: big data, dark orange: co-workers, light orange: law school, purple: former employer
Machine Learning Algorithms

Decision trees


K-nearest Neighbour


\hat f(\vec x_q) = \frac{\sum_{i=1}^kw_if(x_i)}{\sum_{i=1}^kw_i}
w = \frac{1}{d(x_q, x_i)^2}
Linear Regression
p(C_k|\vec x) = \frac{p(\vec x|C_k)p(C_k)}{p(\vec x)}
Naive Bayes and Bayesian Networks
\vec x = (x_1, \ldots, x_n)
p(C_k, x_1, \ldots, x_n) = p(C_k)p(x_1, \ldots, x_n |C_k)
= p(C_k)p(x_1|C_k)p(x_2, \ldots, x_n |C_k, x_1)
= p(C_k)p(x_1|C_k)p(x_2|C_k, x_1)p(x_3, \ldots, x_n|C_k, x_1, x_2)
= p(C_k)p(x_1|C_k)p(x_2|C_k, x_1)\ldots p(x_n|C_k, x_1, x_2, x_3, \ldots, x_{n-1})
p(x_i|C_k, x_j) = p(x_i|C_k)
p(x_i|C_k, x_j, x_k) = p(x_i|C_k)
p(x_i|C_k, x_j, x_k, x_l) = p(x_i|C_k)
p(C_k | x_1, \ldots, x_n) \propto p(C_k, x_1, \ldots, x_n)
\propto p(C_k)p(x_1|C_k)p(x_2|C_k)p(x_3|C_k)\ldots
\propto p(C_k)\prod_{i=1}^n p(x_i|C_k)
"Naive" conditional independance assumption
p(C_k|x_1, \ldots, x_n)= \frac{1}{Z} p(C_k)\prod_{i=1}^n p(x_i|C_k)
Z = \frac {1}{p(\vec x)}
\hat y = C_k
\hat y = argmax_{k (\in 1, \ldots, K)}p(C_k)\prod_{i=1}^np(x_i|C_k)
perceptrons and neural Networks





Support Vector Machines (SVM)

< \vec{x}, y >
\vec{x} \rightarrow f(\vec{x})
h \in H : H = \{h_1, h_2, \ldots, h_n\}
\vec{w} = \{w_1, w_2, \ldots, w_n\}
f(\vec x) \approx \tilde{f}(\vec x) = \sum_i w_i h_i(\vec x)
Supervised Learning:
Goal
An Example
\vec{w}^* = argmin_{\vec w} \sum_j^{N} (f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
h \in H : H = \{h_1, h_2, \ldots, h_n\}
\vec{w} = \{w_1, w_2, \ldots, w_n\}
f(\vec x) \approx \tilde{f}(\vec x) = \sum_i w_i h_i(\vec x)
Linear Regression

< x_i, d_i >
d_i = f(\vec x) + \epsilon_i
\epsilon_i \sim N(0, \sigma_{\epsilon})
h_{ML} = argmax_{h \in H} P(D|h) = \prod_i^m p(d_i | h)
p(d_i | h) = \frac{1}{\sqrt{2\pi\sigma^2}}e^{-\frac{1}{2}(\frac{d_i - h(x_i)}{\sigma})^2}
h_{ML} = argmax_{h \in H} \sum_i^m ln(\frac{1}{\sqrt{2\pi\sigma^2}}) - (\frac{1}{2}\frac{d_i - h(x_i)}{\sigma})^2
h_{ML} = argmax_{h \in H} \sum_i^m - (d_i - h(x_i))^2
h_{ML} = argmin_{h \in H} \sum_i^m (d_i - h(x_i))^2
Bias = E[\hat f(\vec x)] - f(\vec x)
- Measures how well you expect to represent the "true" solution
- Decreases with model complexity

Learning Bias
Variance = E[(\hat f(\vec x) - E [\hat f(\vec x)]]^2
- Measures how sensitive given learner is to a specific dataset
- Decreases with simpler model

Learning Variance
Simple models may not fit the data
Complex models may not be applicable to new, as of yet unseen data
choice of hypothesis class introduces learning bias
more complex class, less bias, but more variance
Bias-Variance Tradeoff
Error can be decomposed:
Err(\vec x) = E[(f(\vec x) - \hat f(\vec x))^2]
= (E[\hat f(\vec x)] - f(\vec x))^2 + E[(\hat f(\vec x) - E [\hat f(\vec x)]]^2 + \sigma^2
Choice of hypothesis class introduces learning bias
Bias-Variance Tradeoff
= Bias^2 + Variance + \sigma^2

Overfitting
Training Set Error:
error_{train}(\vec w) = \frac{1}{N_t}\sum_{j=1}^{N_t}(f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
Overfitting
error_{true}(\vec w) = \int_x(f(\vec x) - \sum_i w_ih_i(\vec x))^2p(x)dx
error_{true}(\vec w) \approx \frac{1}{M}\sum_{j=1}^{M}(f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
Prediction Error:
error_{true}(\vec w) \approx \frac{1}{M}\sum_{j=1}^{M}(f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
error_{train}(\vec w) = \frac{1}{N_t}\sum_{j=1}^{N_t}(f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
Why doesn't training error approximate prediction error?
training error good estimate for single w, but w was optimised with respect to training data, and found that w was good for this set of samples
Generalisation
Test Set Error
error_{test}(\vec w) = \frac{1}{N_{test}}\sum_{j=1}^{N_{test}}(f(\vec x_j) - \sum_i w_ih_i(\vec x_j))^2
Given dataset D, randomly split into two parts:
- Training data
- Test data
Use Training Data to optimise w
For the final output w', evaluate error once using:
Generalisation
A learning algorithm overfits the training data if it outputs a solution w' when there exists another solution w'' such that:
[error_{train}(w') < error_{train}(w'')] \wedge [error_{test}(w'') < error_{test}(w')]
Overfitting typically leads to very large parameter choices
Regularised regression aims to impose a complexity restriction by penalising large weights
Generalisation
better on training data
worse on testing data
\hat{w}_{ridge} = argmin_w \sum_{j=1}^N(f(\vec x_j) - (w_0 + \sum_i^kw_ih_i(\vec x_j)))^2 + \lambda\sum_i^kw_i^2
\hat{w}_{ridge} = argmin_w \sum_{j=1}^N(f(\vec x_j) - (w_0 + \sum_i^kw_ih_i(\vec x_j)))^2 + \lambda\sum_i^k|w_i|
\lambda \ge 0
Ridge Regression
Lasso Regression

Regularisation
Larger
more penalty, smoother function, more bias
Smaller
more flexible, more variance
Regularisation
\lambda
\lambda
Randomly divide data into k equal parts

D_1, \ldots, D_k
error_{D_i} = \frac{k}{N} \sum_{\vec x_j \in D_i} (f(\vec x_j) - h_{\frac{D}{D_i}}(\vec x_j))^2
Learn classifier
h_{\frac{D}{D_i}}
Estimate error of
h_{\frac{D}{D_i}}
on validation set
D_i
k-Fold Cross Validation
using data not in
D_i
error_{k-fold} = \frac{1}{k}\sum_{i=1}^kerror_{D_i}
ML Pipeline
END PROGRAM.
Machine Learning
By Nick Browning
Machine Learning
An introductory seminar to machine learning (ML), with real-world examples, a brief discussion of ML algorithms, and a worked example (linear regression) highlighting the bias-variance tradeoff, generalisation, overfitting and the necessity for regularisation.




