Stabilizing contact-rich trajectories
Pang, Terry, Jack
Turning the ball by 30 degrees: open-loop
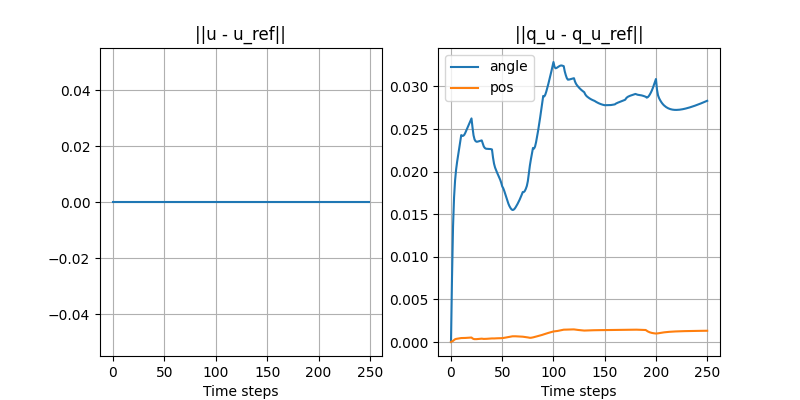
- Simulated in Drake with the same SDF as the quasi-dynamic model used for planning.
Turning the ball by 30 degrees: open-loop with disturbance
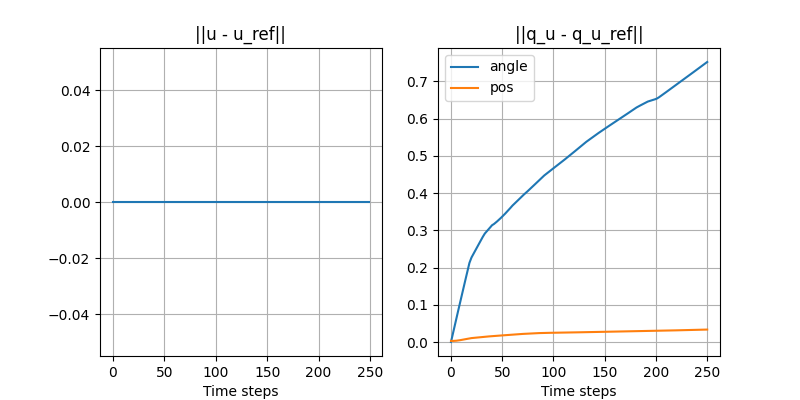
- Initial position of the ball is off by 3mm.
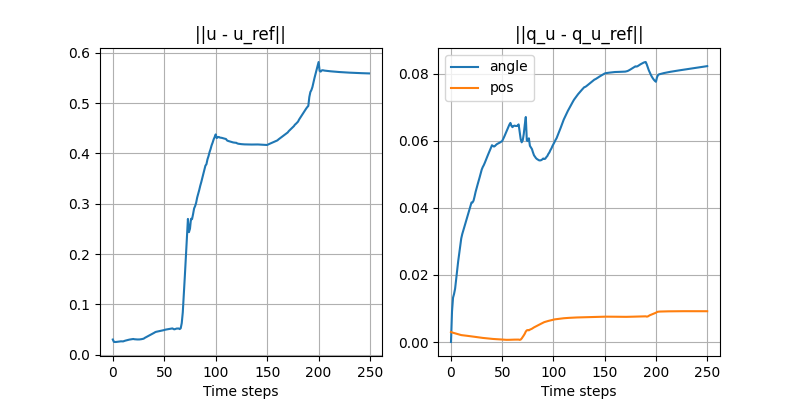
Turning the ball by 30 degrees: closed-loop with disturbance
- Initial position of the ball is off by 3mm.
- Simple controller:
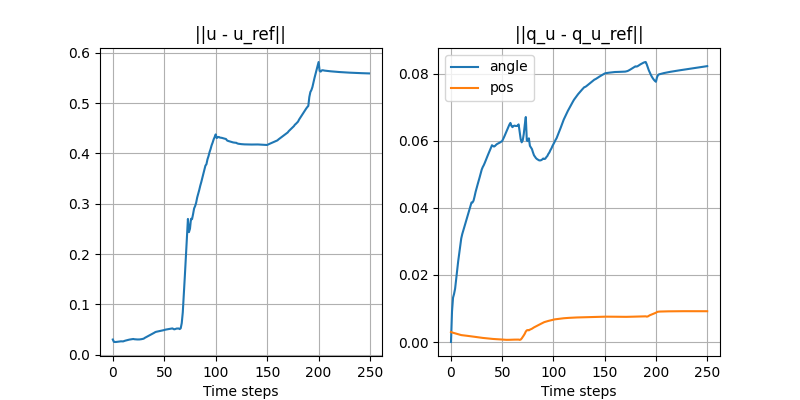
\begin{aligned}
\underset{q^\mathrm{u}_+, u}{\min} &\|q_+^\mathrm{u} - q_+^\mathrm{u, ref}\|_\mathbf{Q} + \|u - u^\mathrm{ref} \|_\mathbf{R}, \text{s.t.}\\
& q^\mathrm{u}_+ = \mathbf{A}_\rho^\mathrm{u} q^\mathrm{u} + \mathbf{B}_\rho^\mathrm{u} u
\end{aligned}
Smooth linearization
Task: turning the ball by 30 degrees.
stabilizing_contact_rich_trajectories
By Pang




