Towards environment-aware constrained-based manipulation for service robots
By R.W.J. Wijnands
| Coach: | S. van den Dries, MSc. |
| Supervisors: | dr.ir. M.J.G. van de Molengraft prof.dr.ir. M. Steinbuch |
Background



Literature
Whole-body Control
A constraint on the right gripper
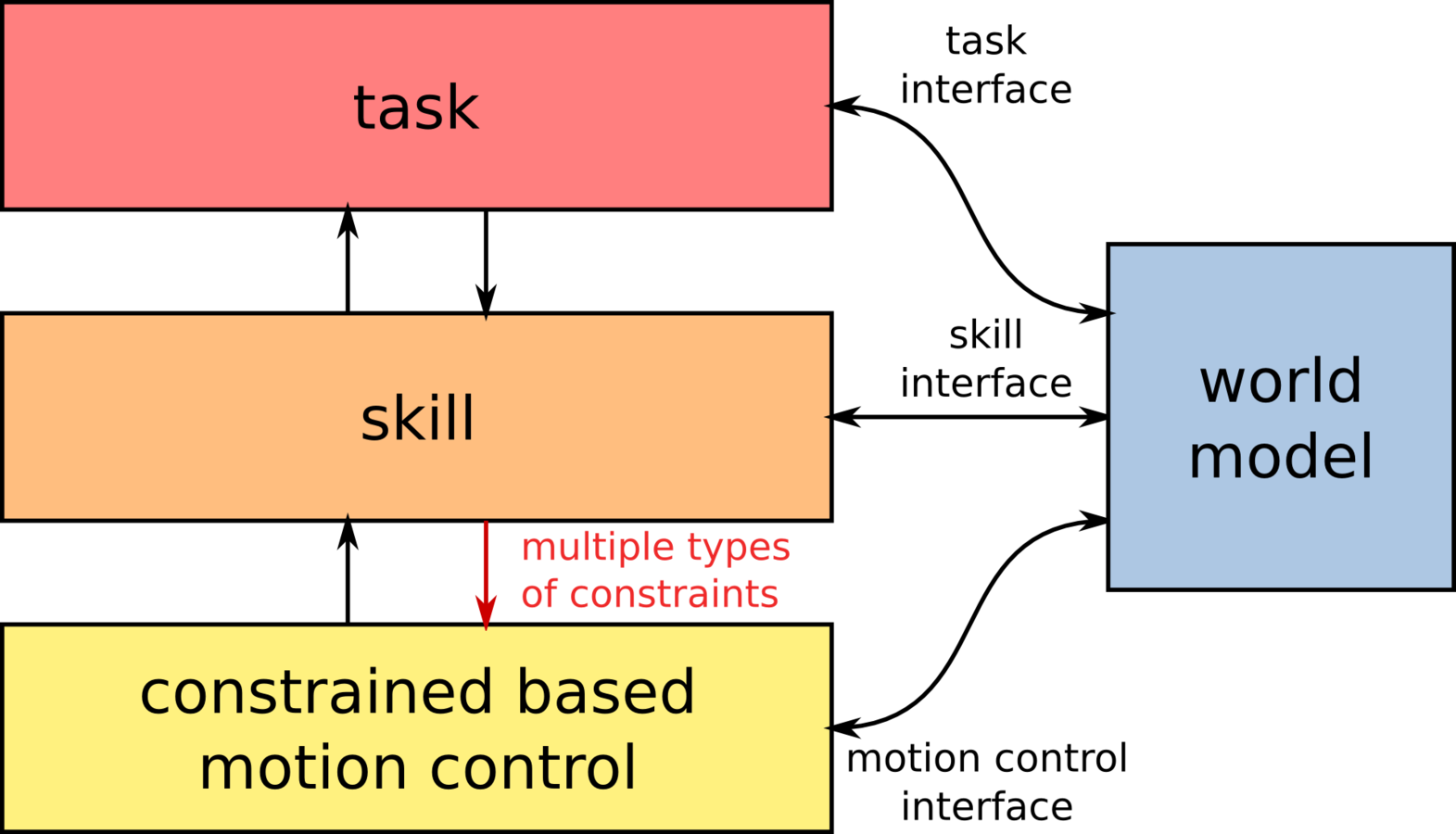
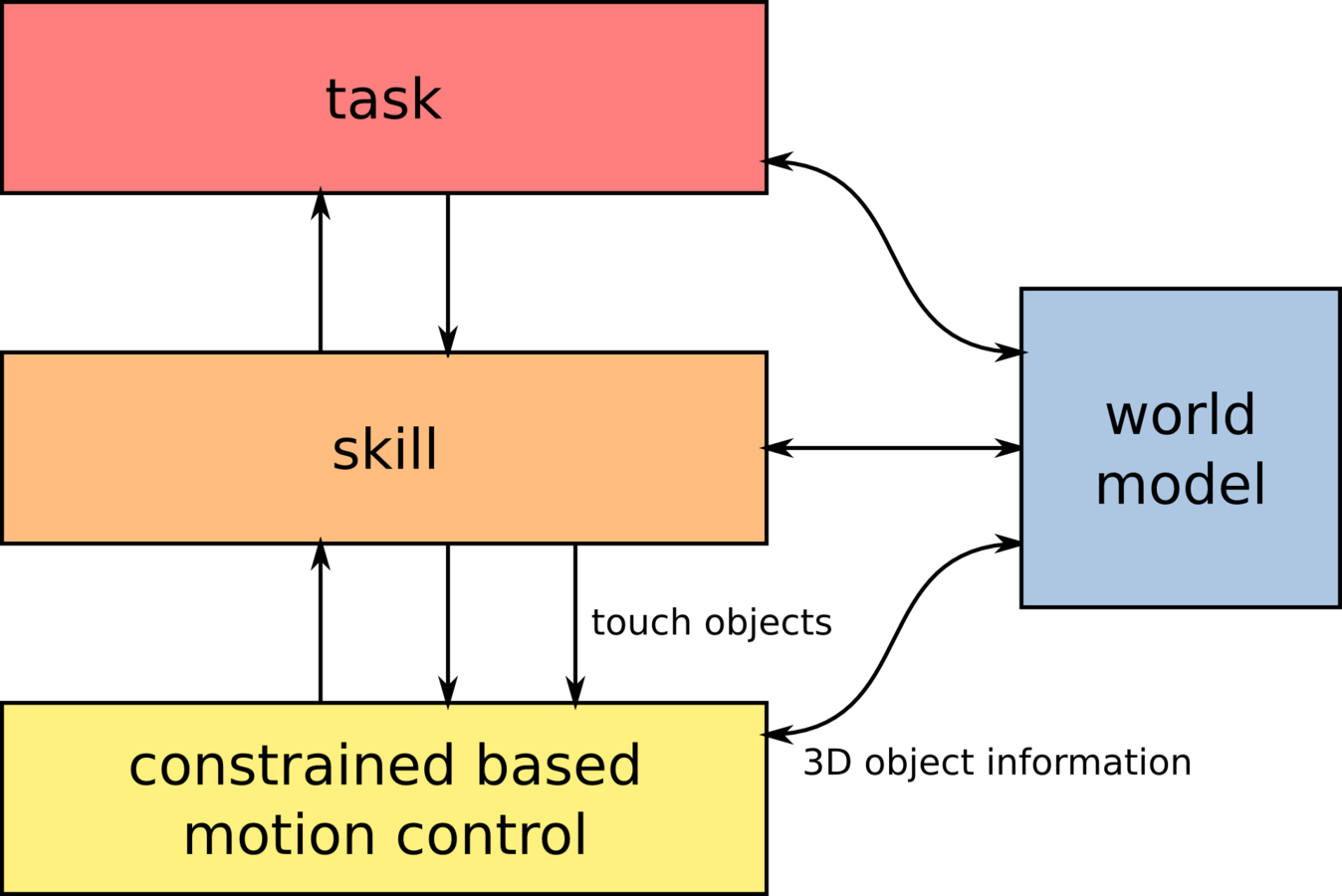
Include a world model
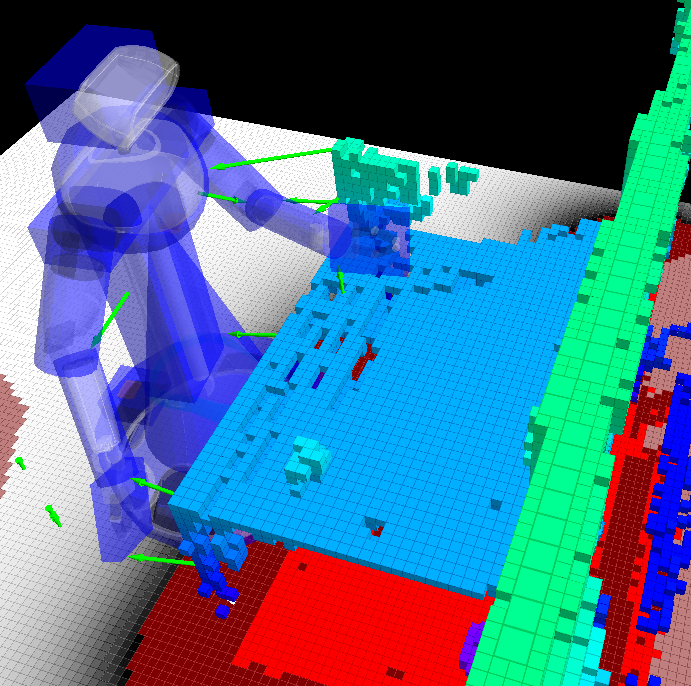
World modeling
By using occupancy grid mapping
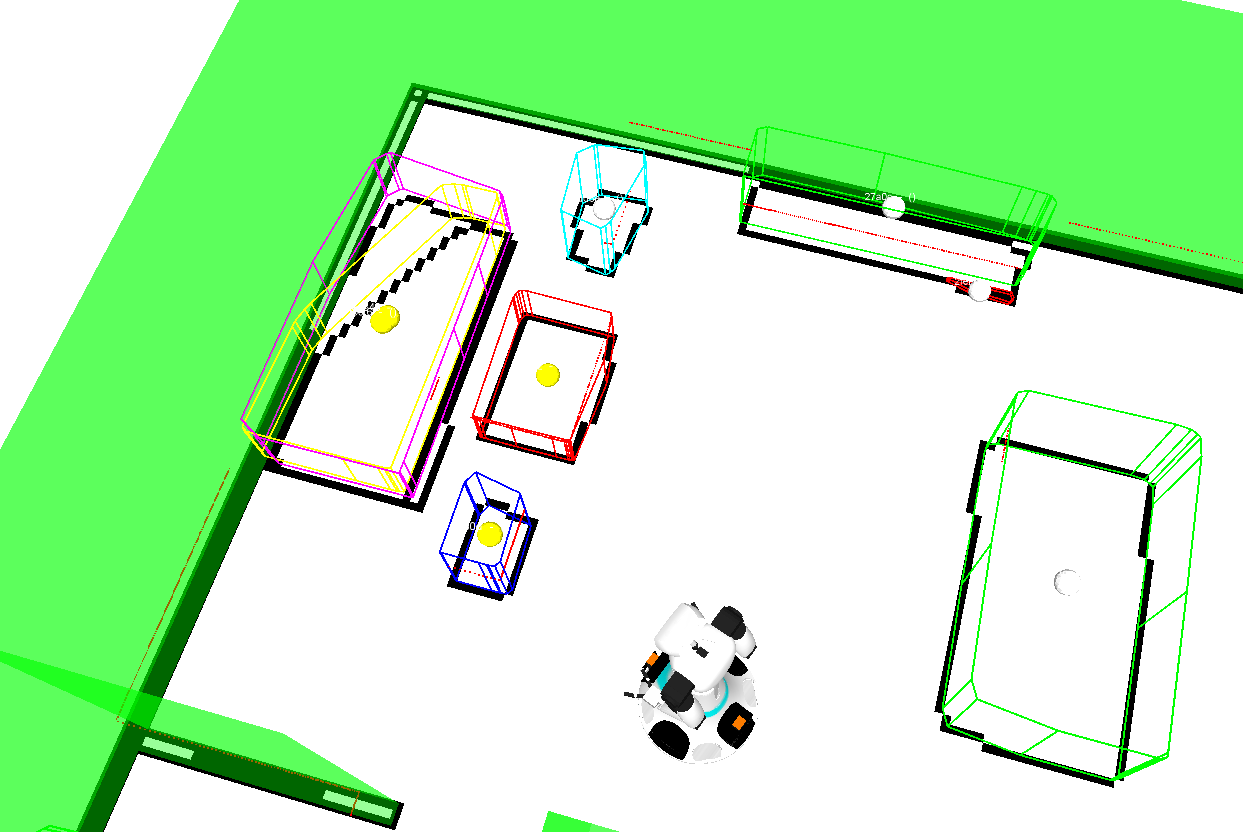
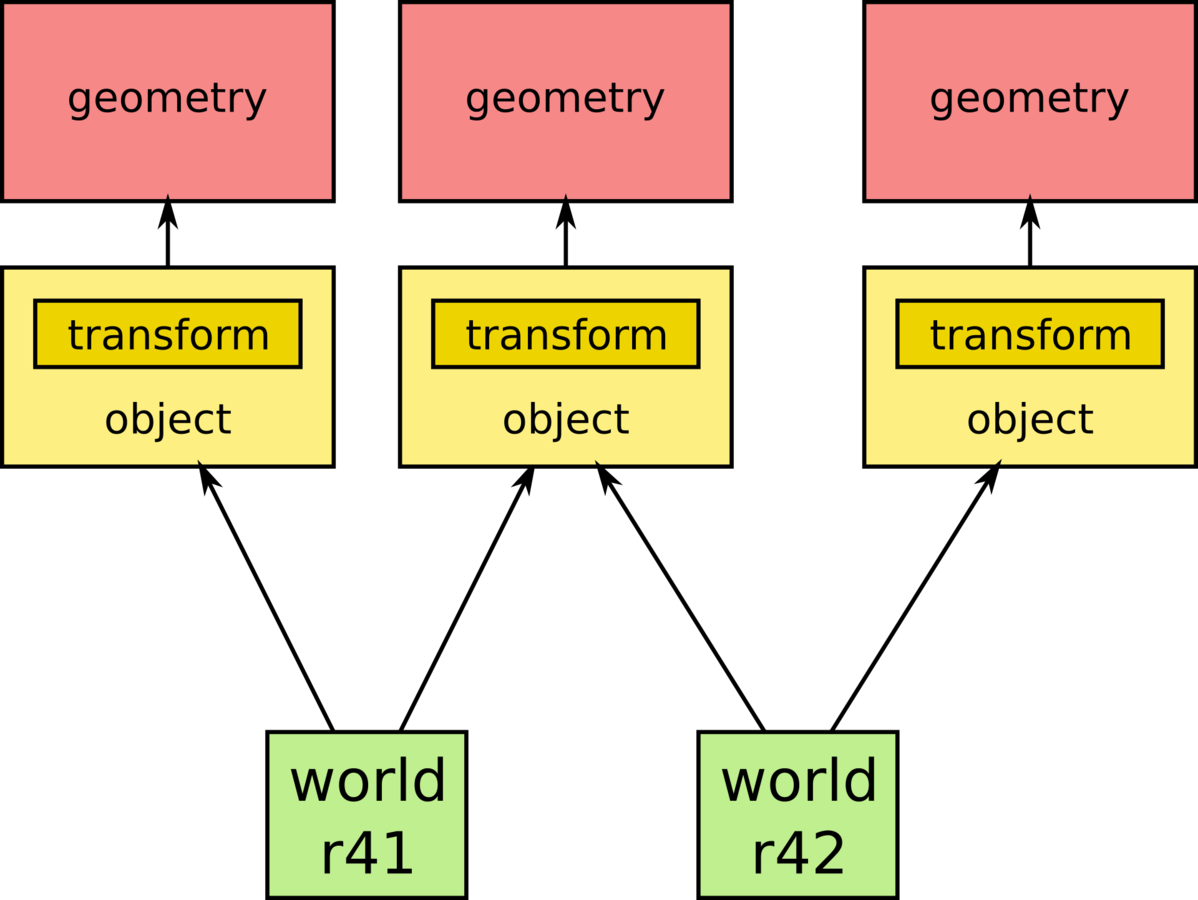
Object-oriented world model
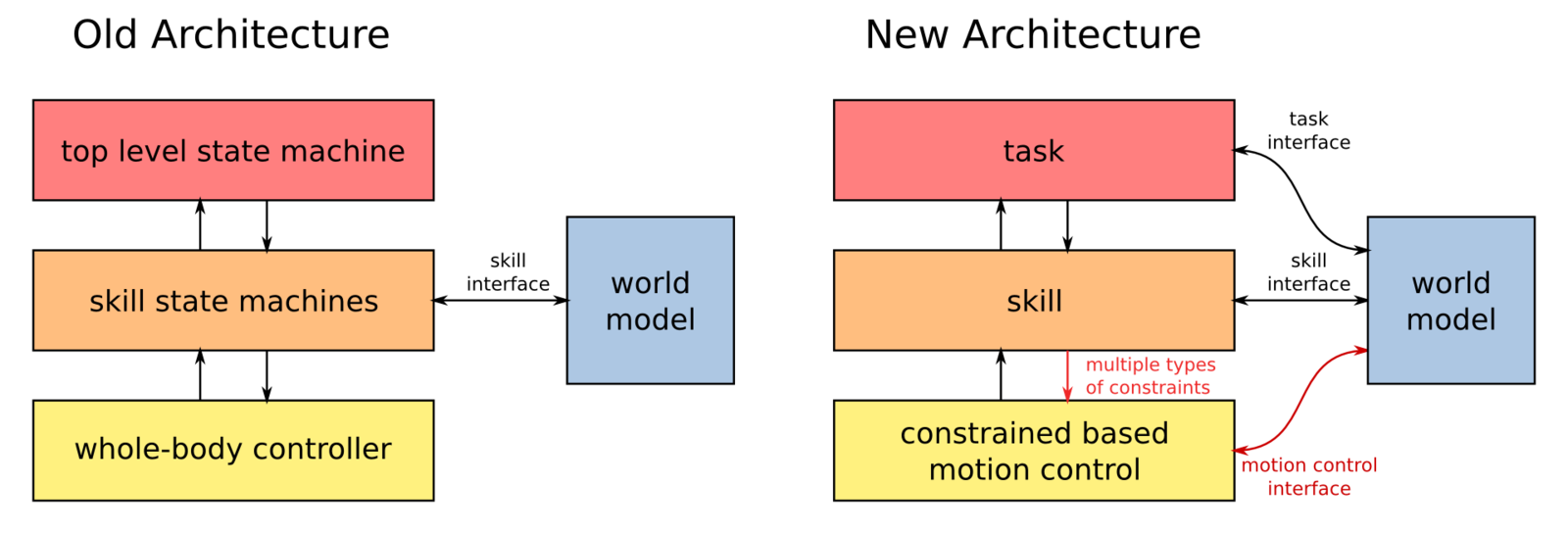
Comparison
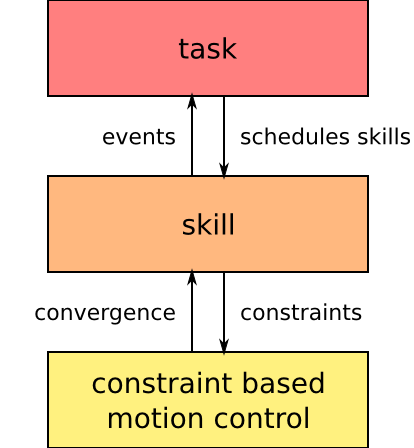
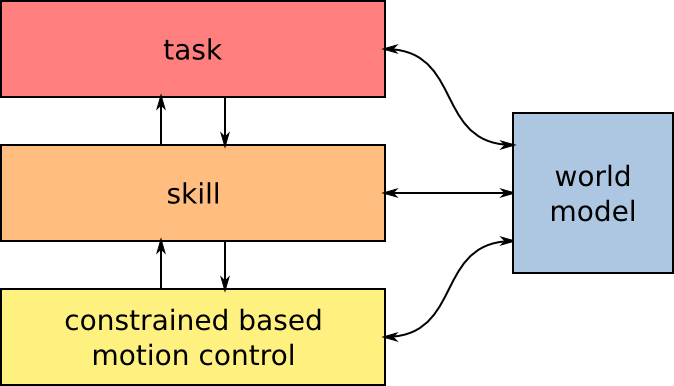
Multiple types of constraints in the skill layer
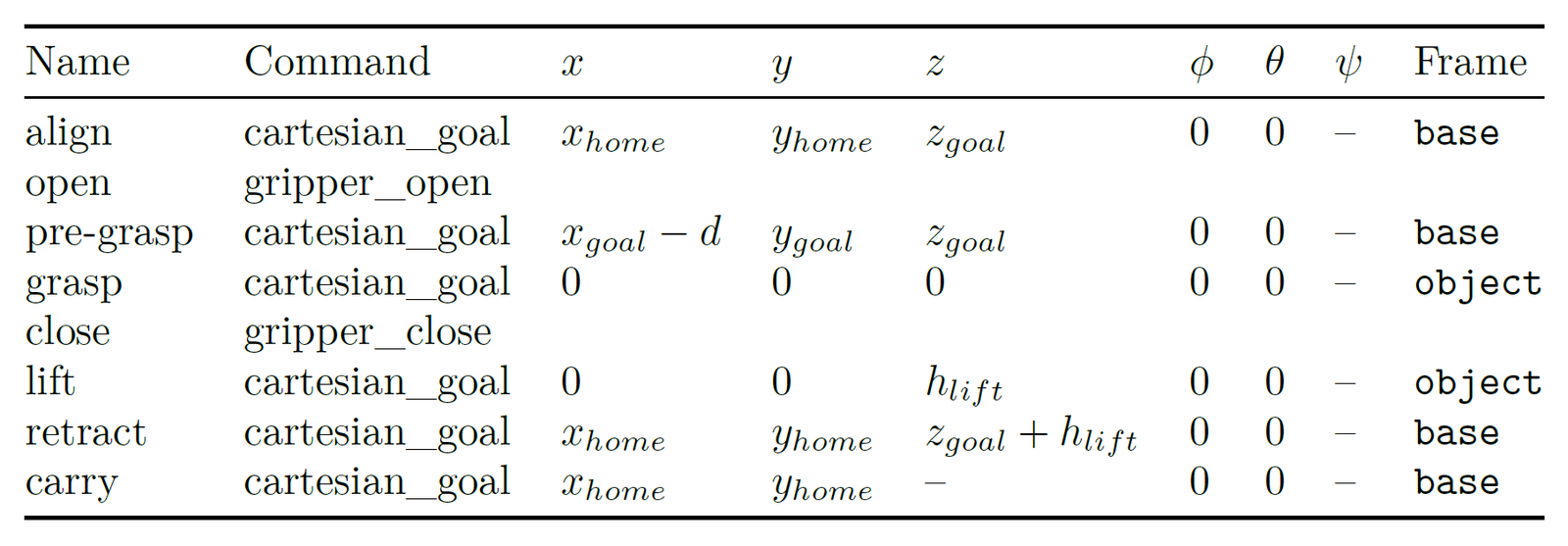
Grasping skill

Partial constraints
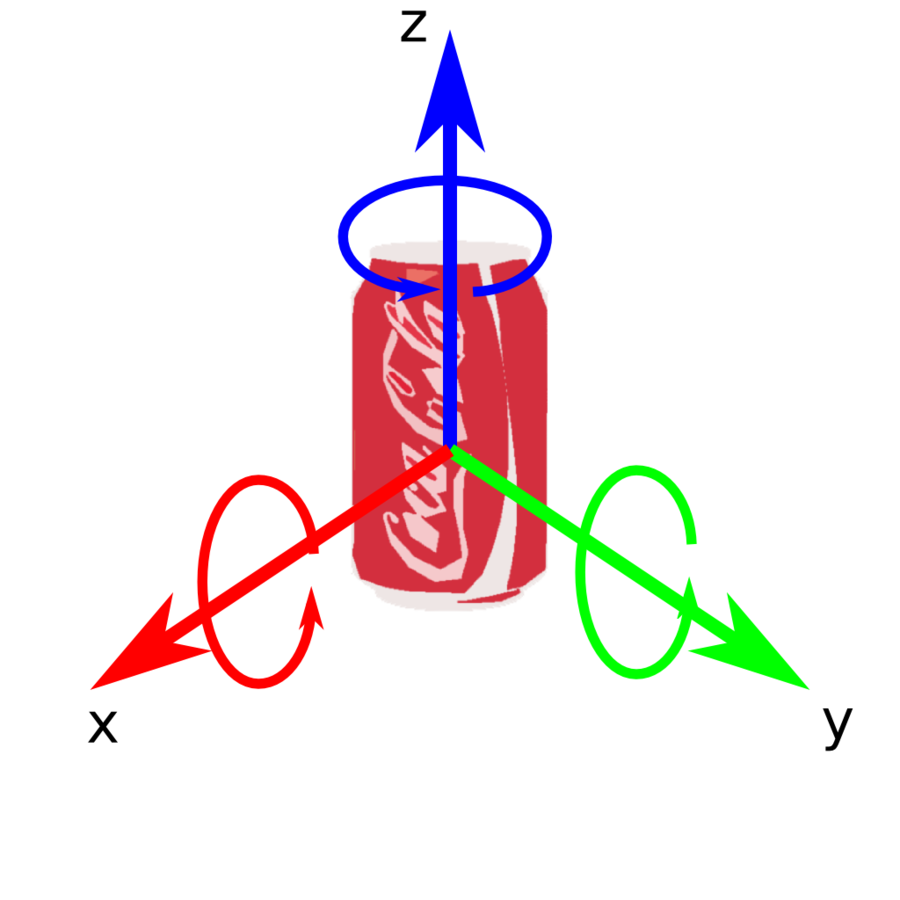
Grasp skill definition
New constraint types
- partial constraints
- simultaneous constraints
- dynamic constraints
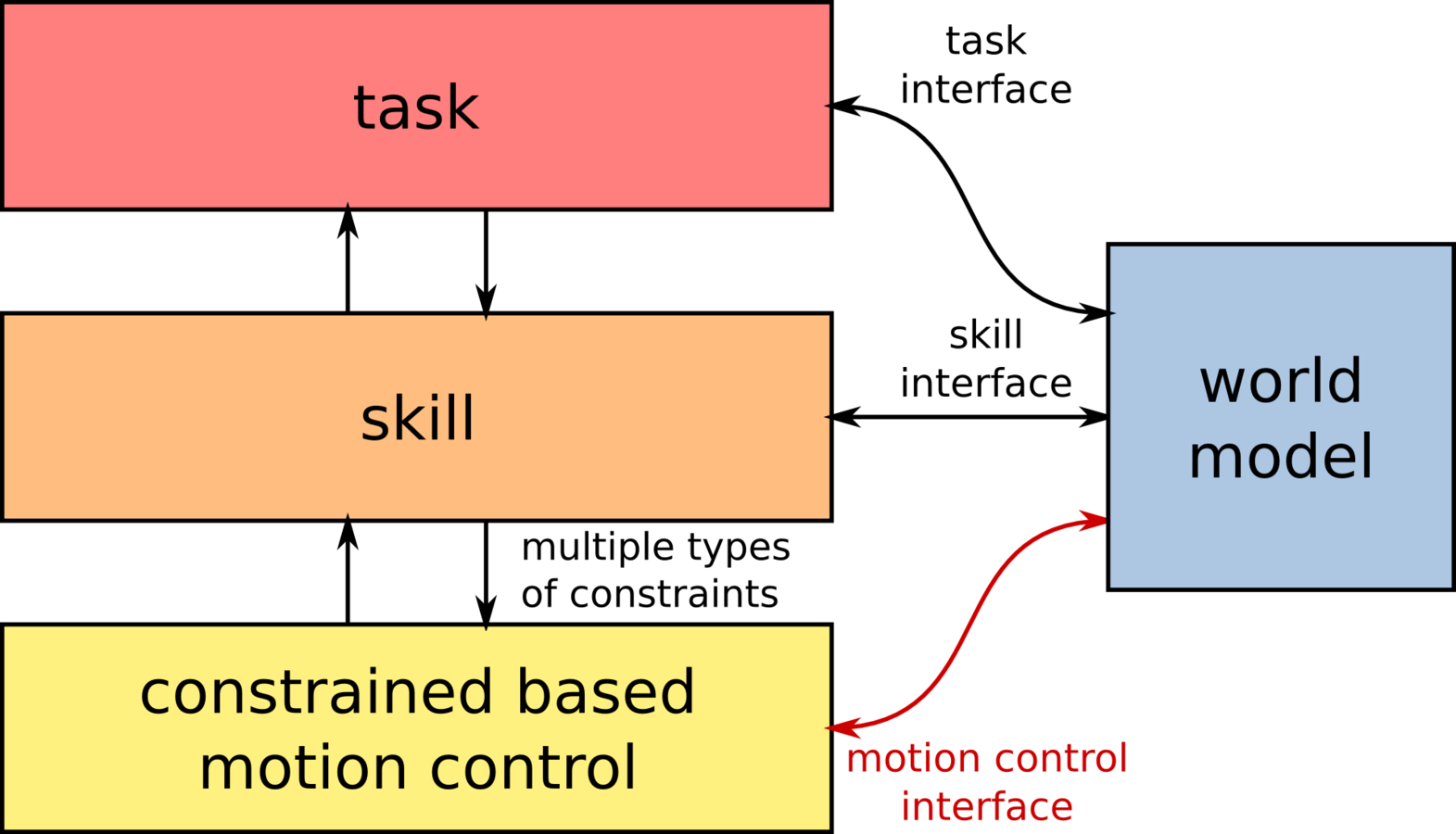
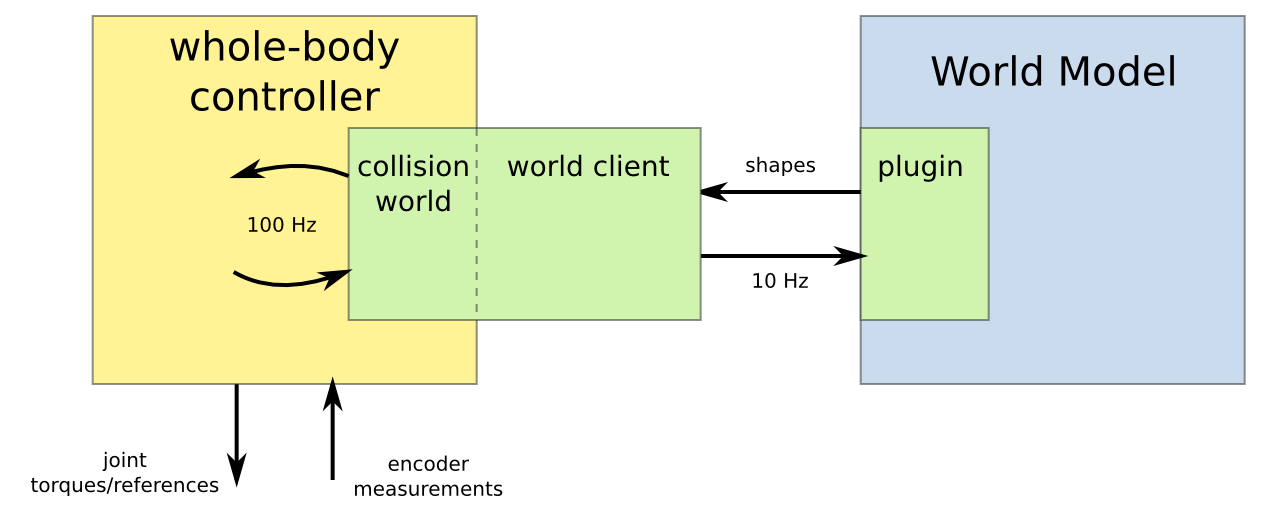
World model connection
Requirements
-
Multiple geometry types
-
primitive shape (box, sphere, capsule, cone, cylinder, plane)
-
polygon mesh
-
octree
-
-
Non blocking
-
Handles large world models
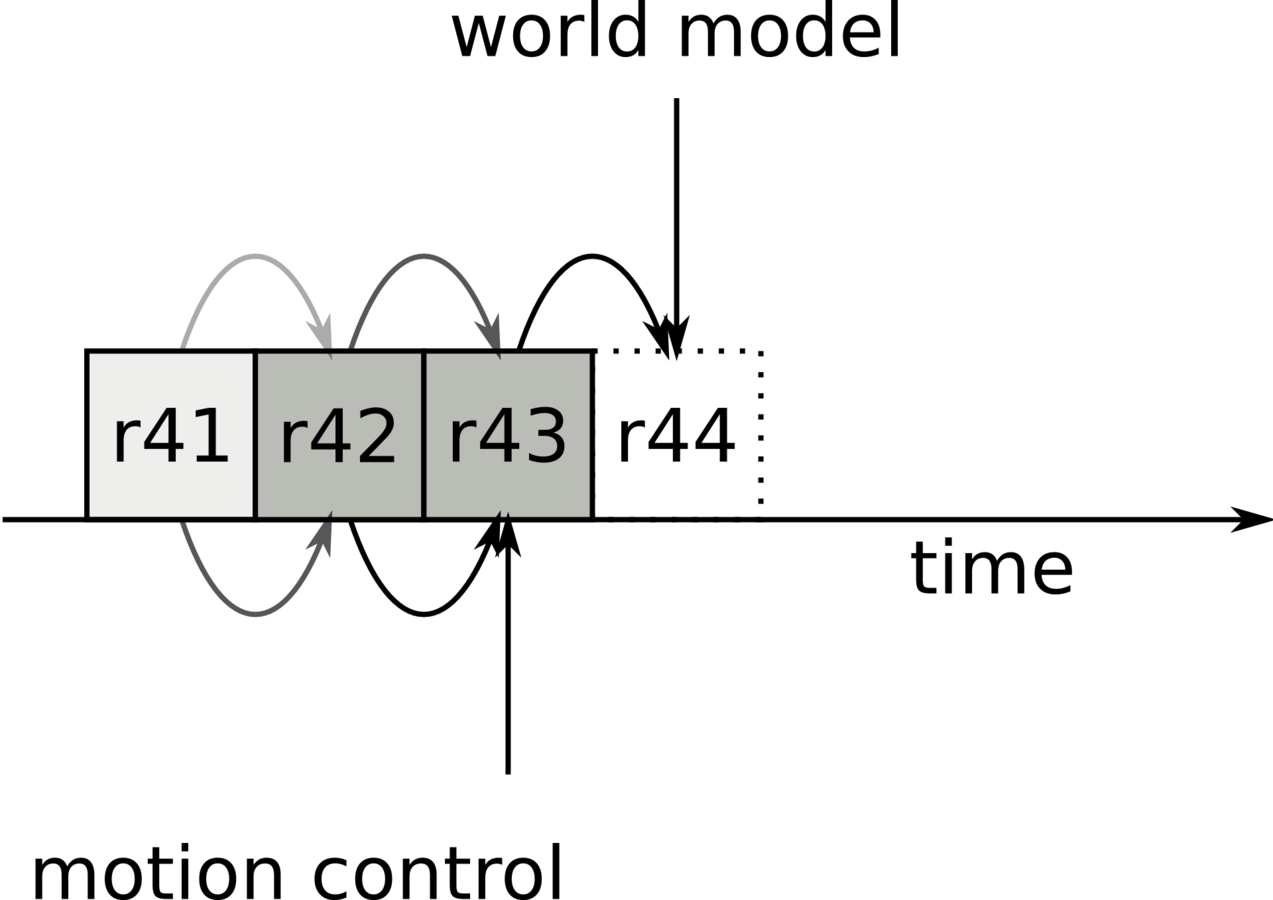
world model revisions
world model revisions
World model connection
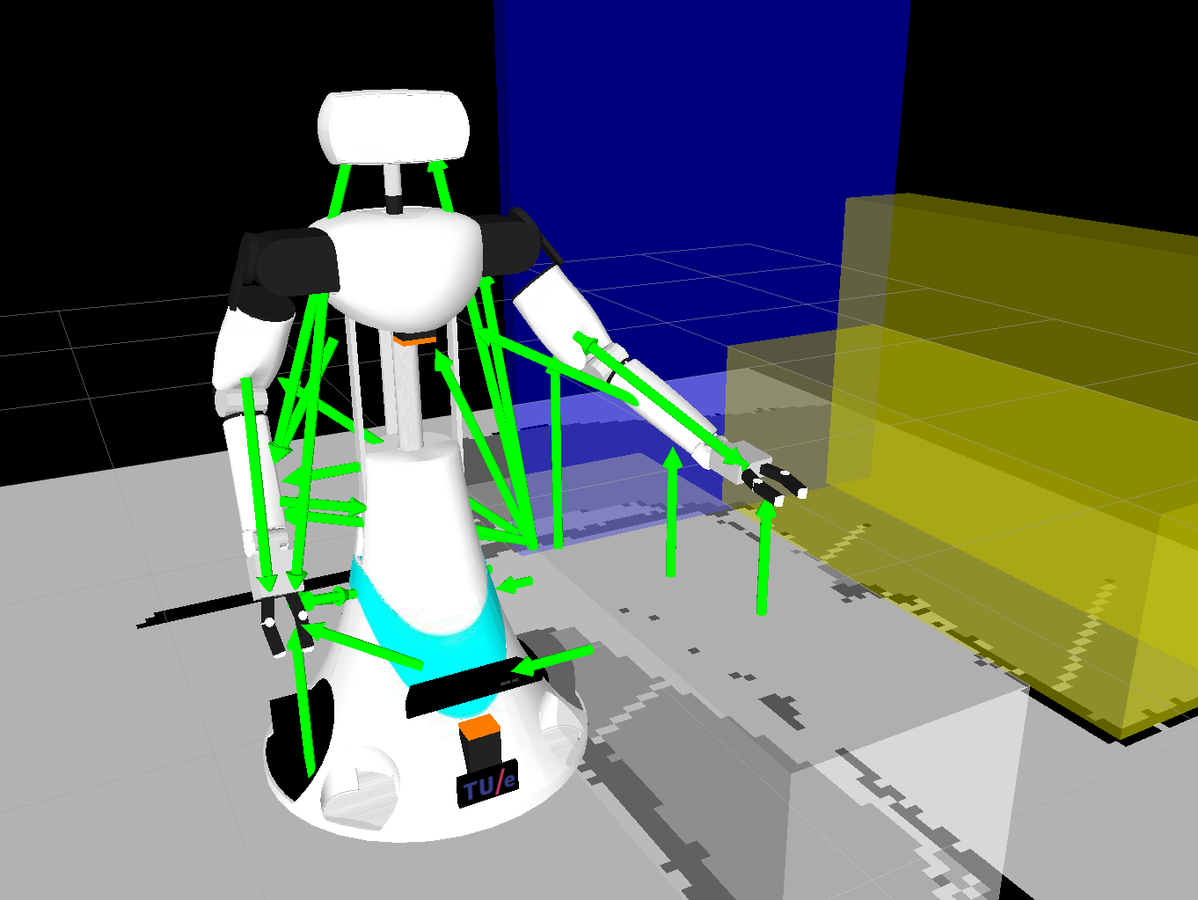
Touching objects
Experiments
Experiment 1
Grasping
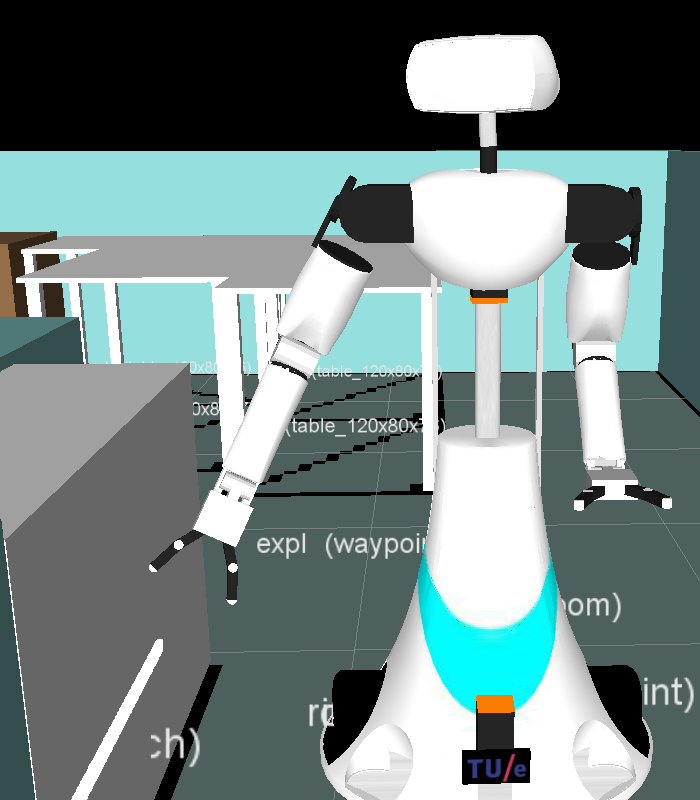
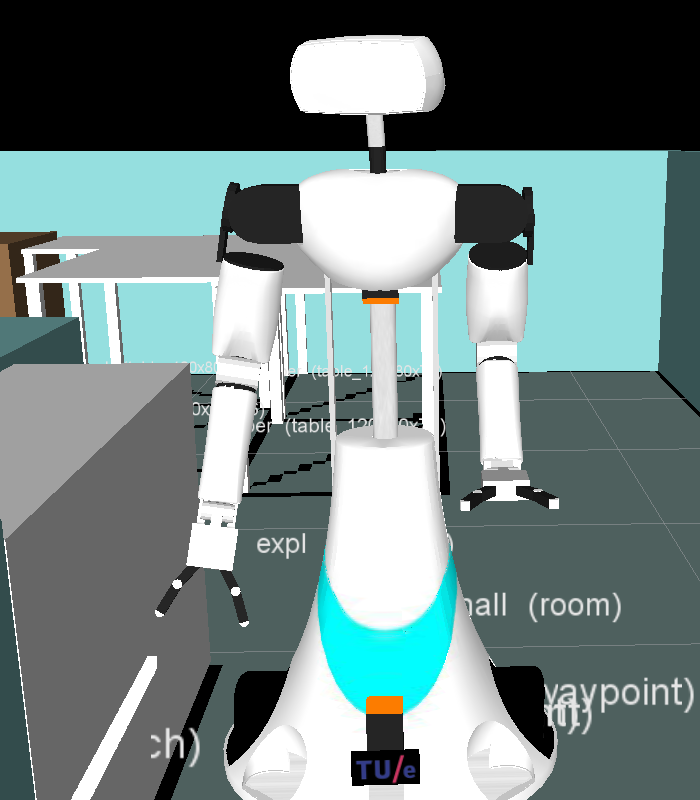
Experiment 2
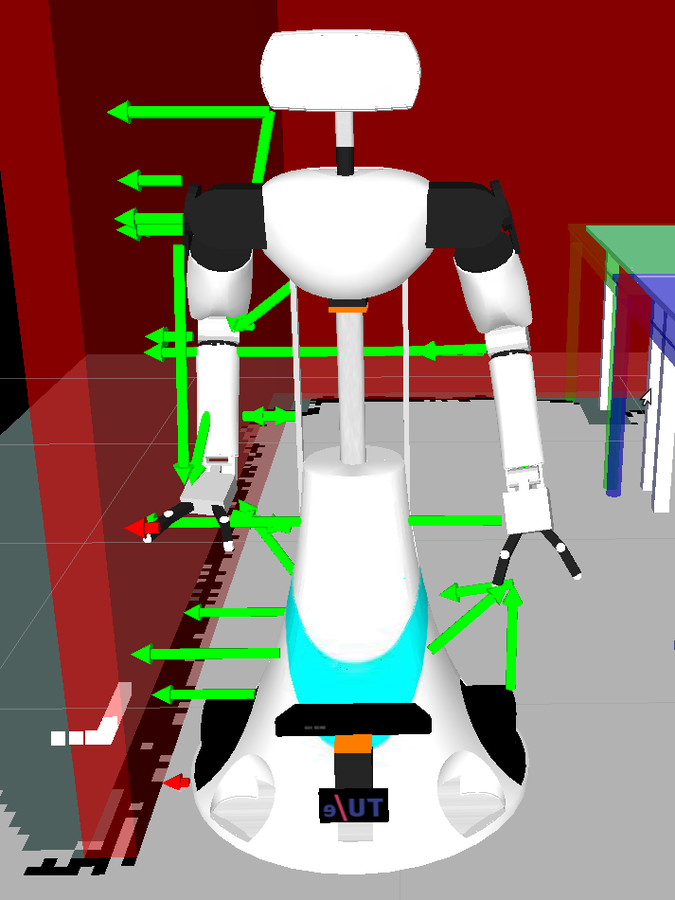
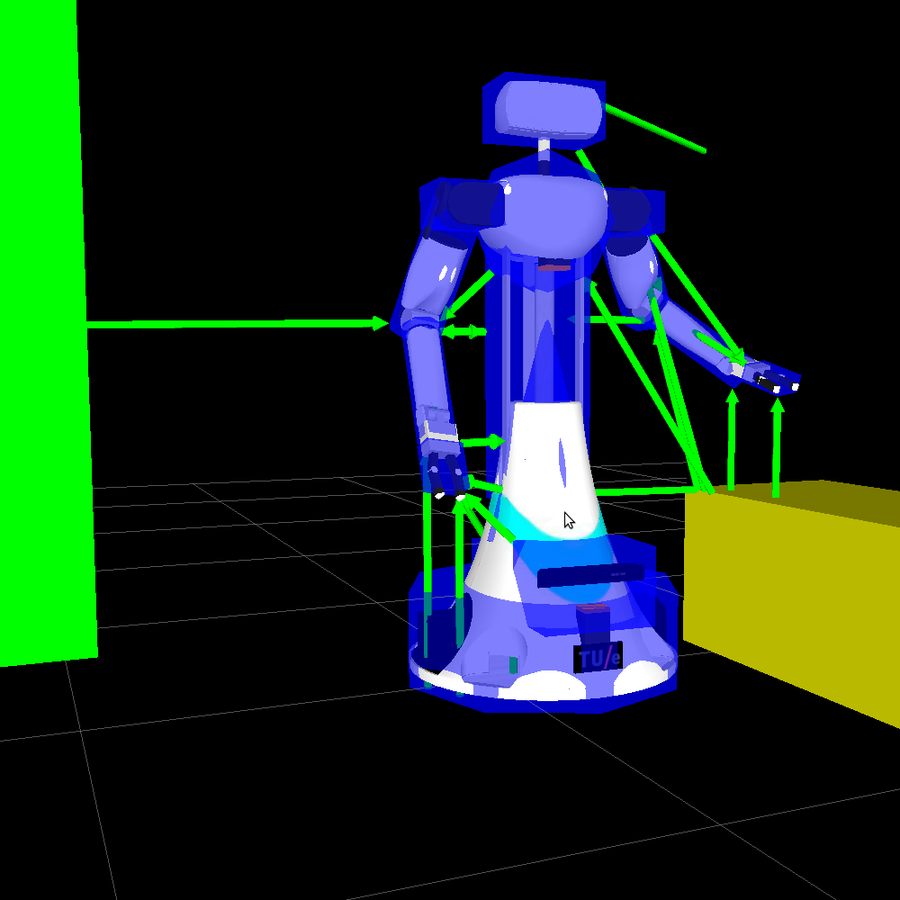
Collision avoidance
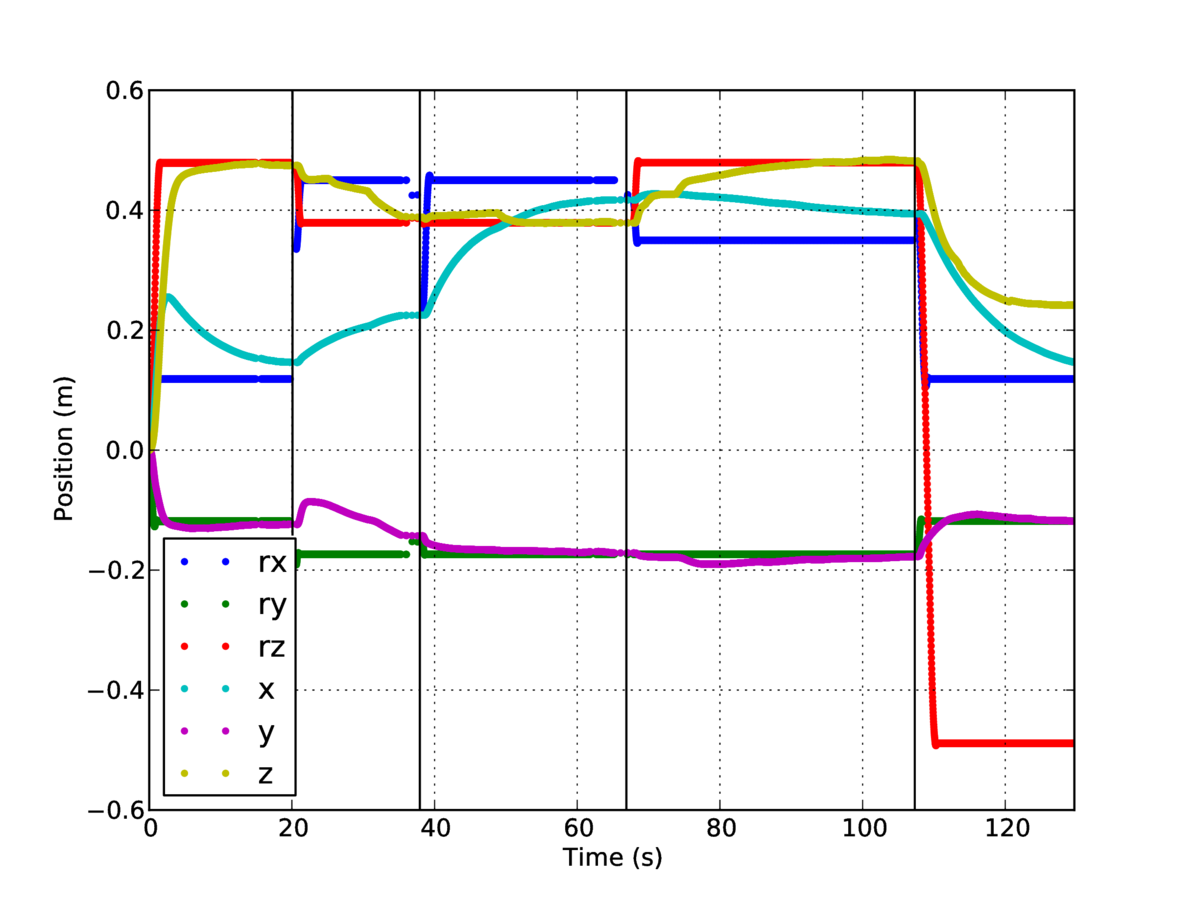
Experiment 2
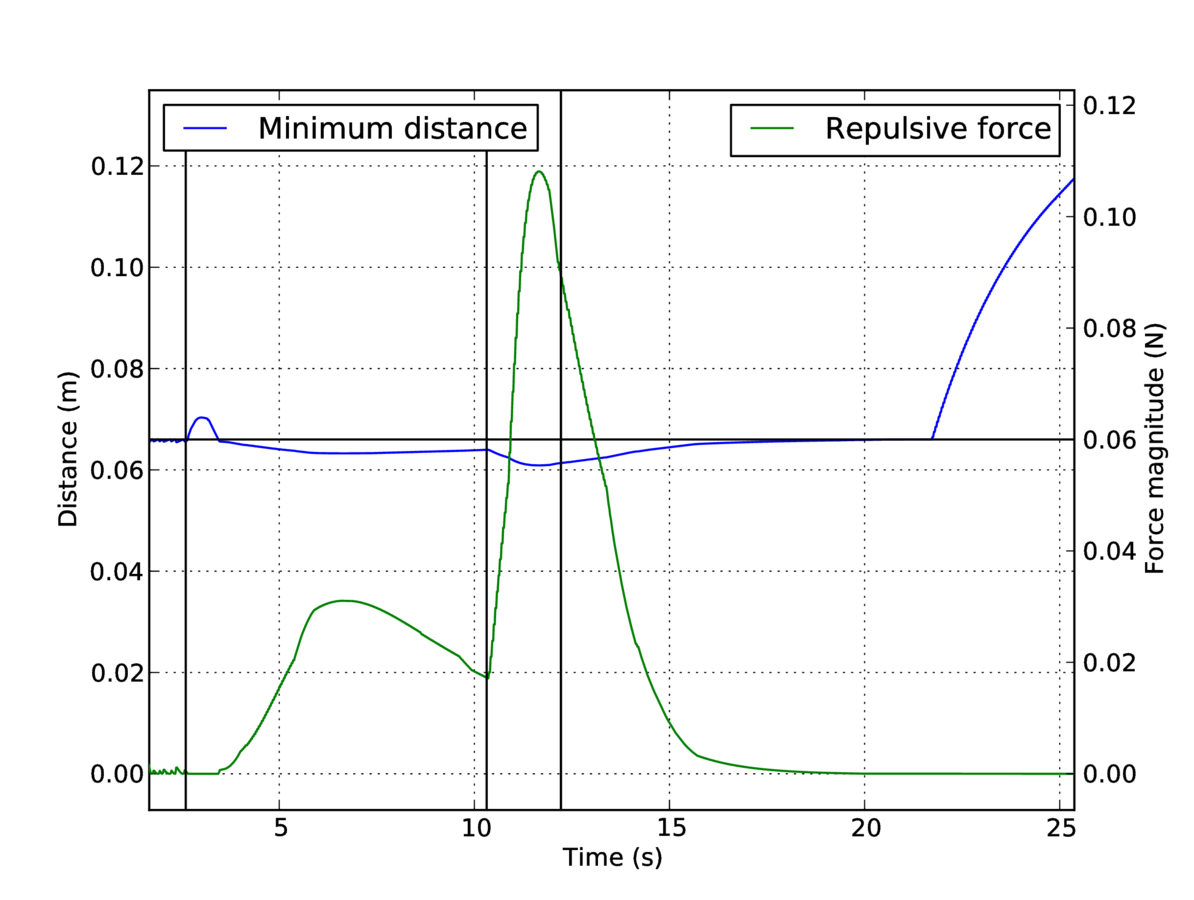
Results
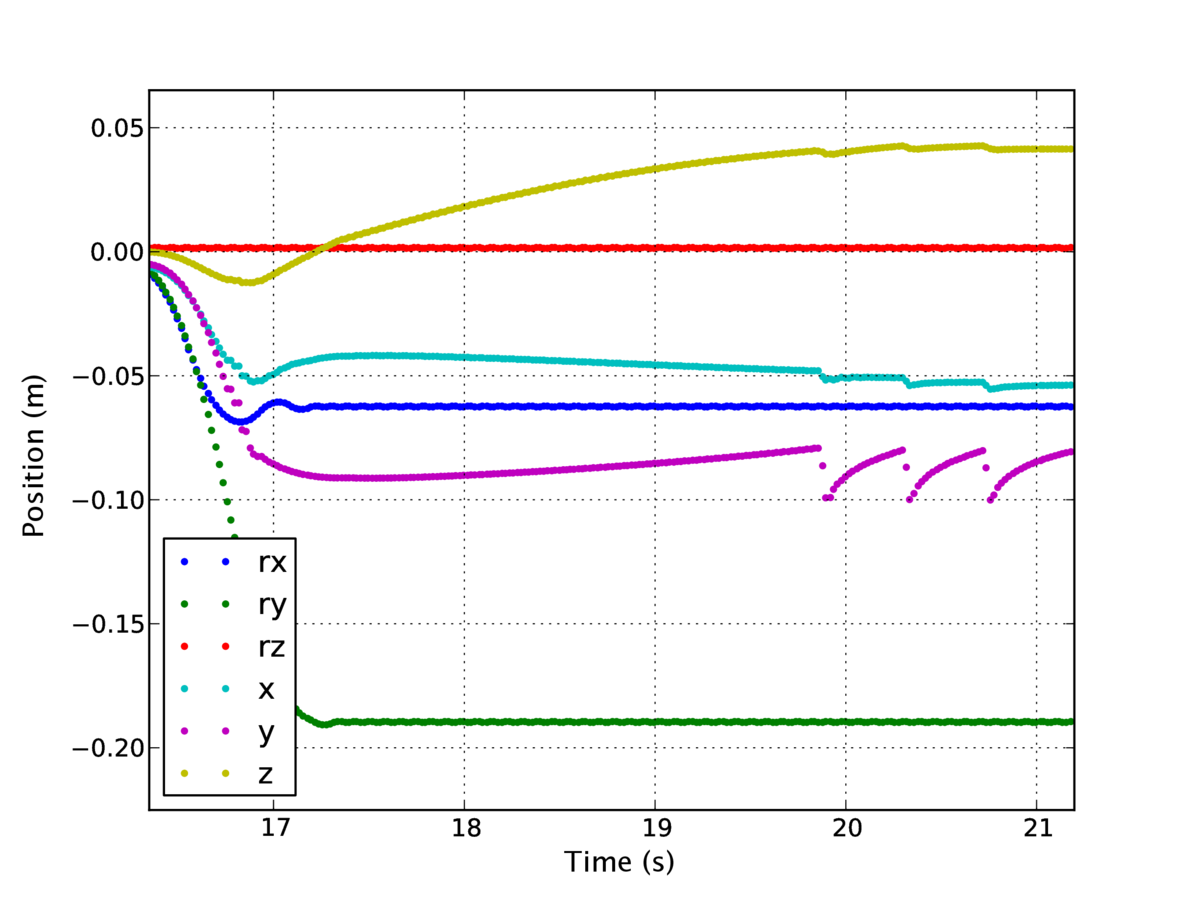
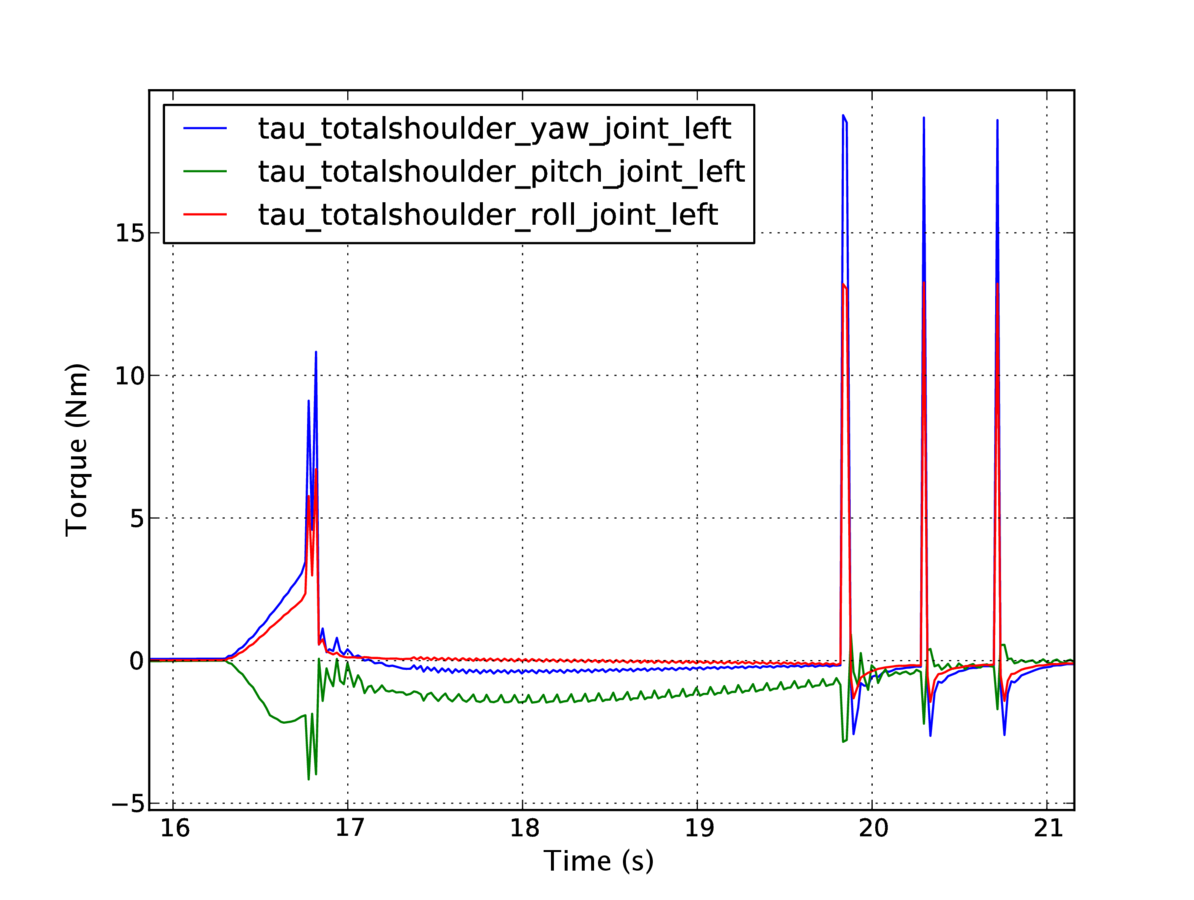
Experiment 2
More results
"Sticking issue"
Discontinous control output
Conclusions
- partial, simultaneous and dynamic constraints
- grasping skill parameters reduced from 16 to 4
- grasping time decreased from 3 to 2 minutes
- integrate an object-oriented world model
- successful environment collision avoidance
- distinguish objects that can be touched from the rest
- grasp moving objects without re-planning
Recommendations
- "sticking issue" & discontinuous control output
- A. Dietrich et al. (2012) On continuous null space projections for torque-based, hierarchical, multi-objective manipulation
- additional testing systems
- 1 DOF force feedback loop
- planar 3-link system
Master Thesis Presentation
By rayman