World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #7
Problem Statement
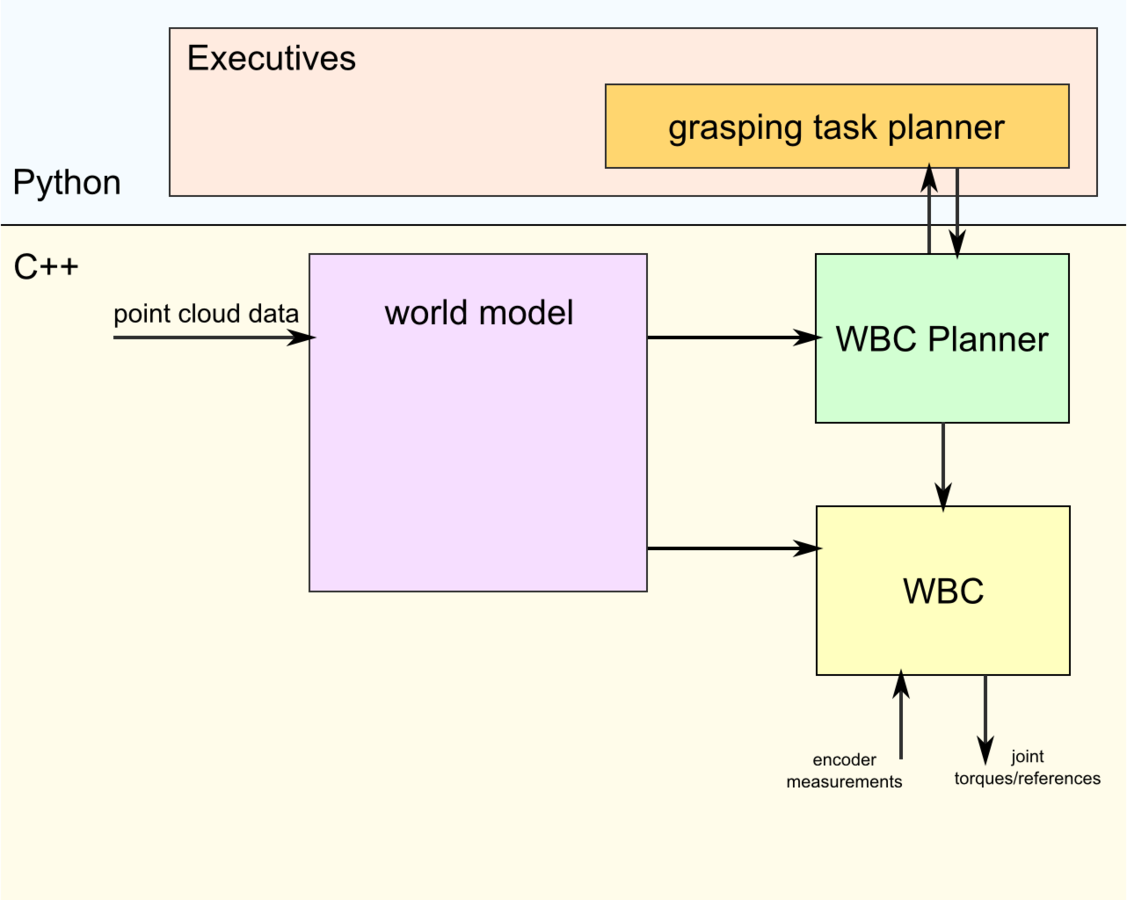
Combine a semantic, volumetric world representation with whole-body control, planning and collision avoidance

Planning
tuning - week 3 + 4, January
experiments - week 1, February t/m week 2 February
report - week 3, February t/m week 3, March
presentation - week 4, March + week 1, April
Experiments
- how close can the arm be to the table
- robot moves→avoid modeled/unmodeled object
- pick and place (stop avoiding the selected object)
- grasp with unknown object
- move target during grasp with the spacenav
Presentation meeting #7
By rayman