World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #5
Problem Statement
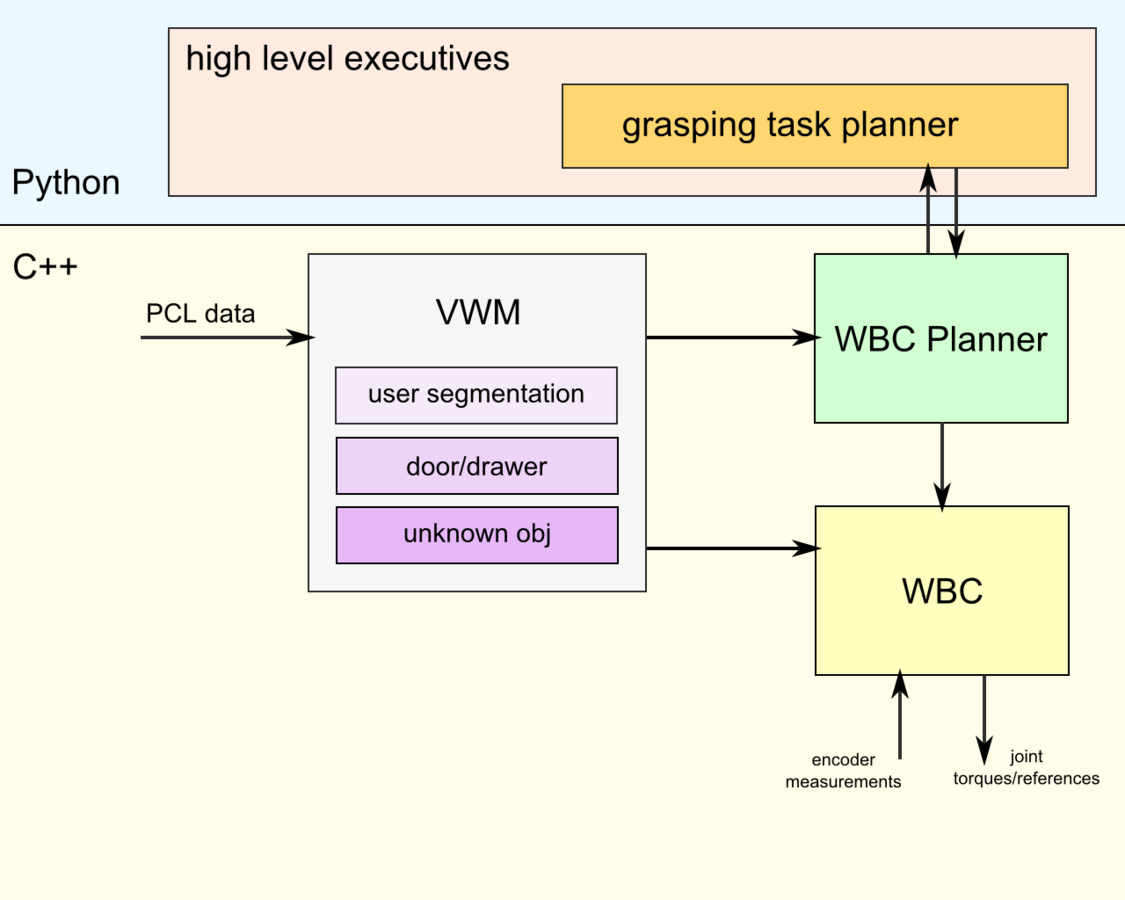
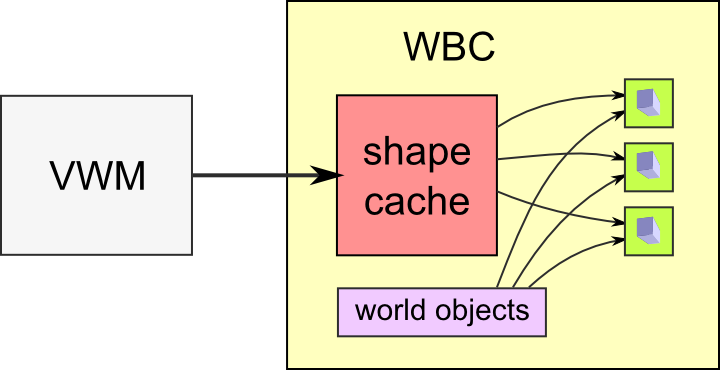
Combine a semantic, volumetric world representation with whole-body control, planning and collision avoidance
Self collision
Environment collision
Next Week
-
verify the computation of wrenches
- verify the computation of joint torques
soon
- improve wbc performance
-
test the new implementation on the robot
-
on-the-fly exclude certain VWM objects
- integrate the VWM with the WBC planner
- grab a VWM object
Presentation meeting #5
By rayman