World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #6
Problem Statement
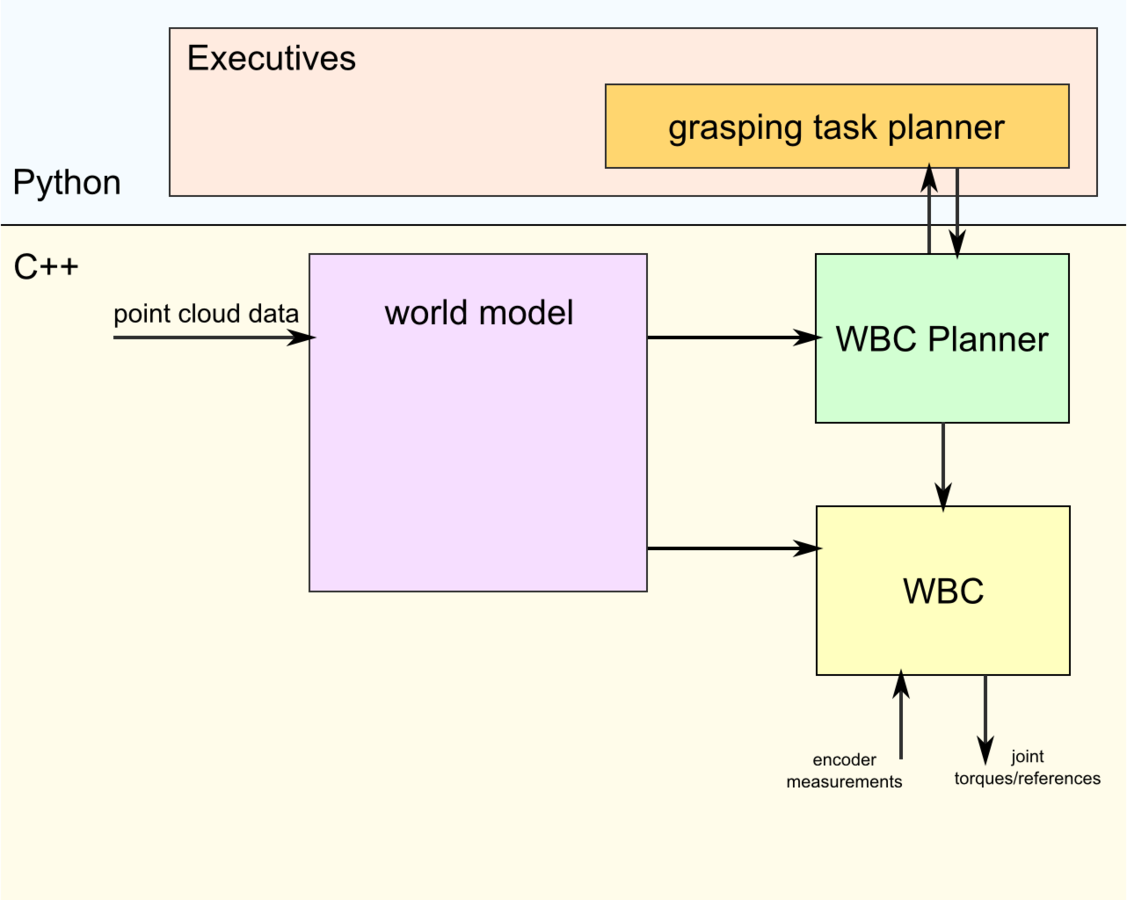
Combine a semantic, volumetric world representation with whole-body control, planning and collision avoidance
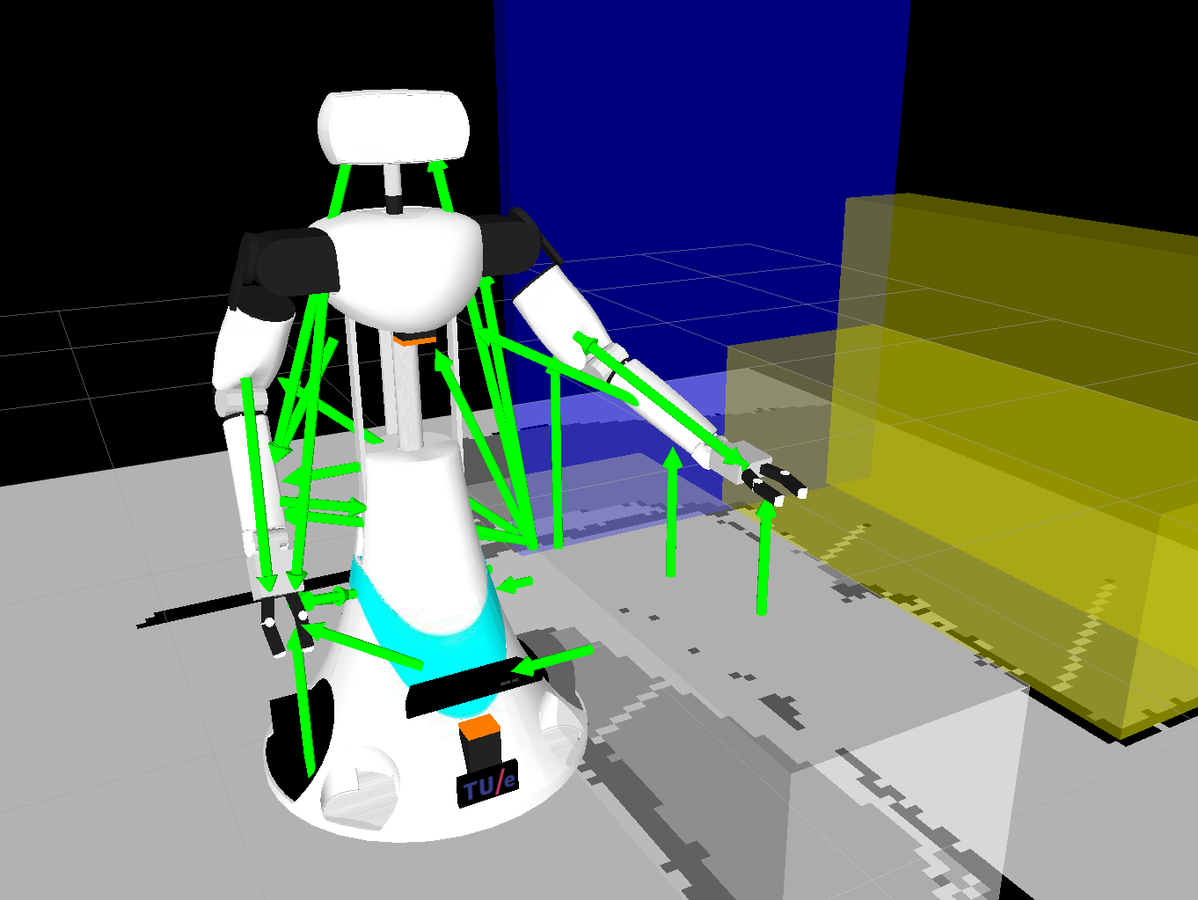
WBC
- implementation is finished
- no coupling with the world model (ed)
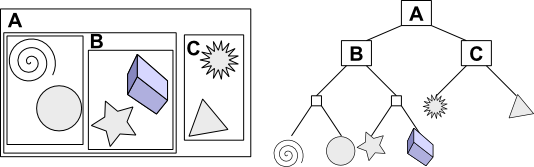
- uses Bounding Volume Hierarchy (BVH)
- broadphase → narrowphase
- uses a big collision callback to skip collisions
- skip collisions > dthreshold

Todo
- testing on the robot
- admittance control not in orocos
- grasping with empty planner
- exclude objects from collision checking
- finish implementation
- writing report
Presentation meeting #6
By rayman