





































 ️
️


















Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
UC Berkeley - 19 December 2021
Facebook AI Research
How to scale to more complex, unstructured domains?
Robotics
Finance
Biological Sciences
Logistics /
Decision Making
Disaster Relief
Industrial Automation
Exploration
Medicine & Eldercare
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
Multi-modal Sensing
Optimized Hardware Design
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
In this talk
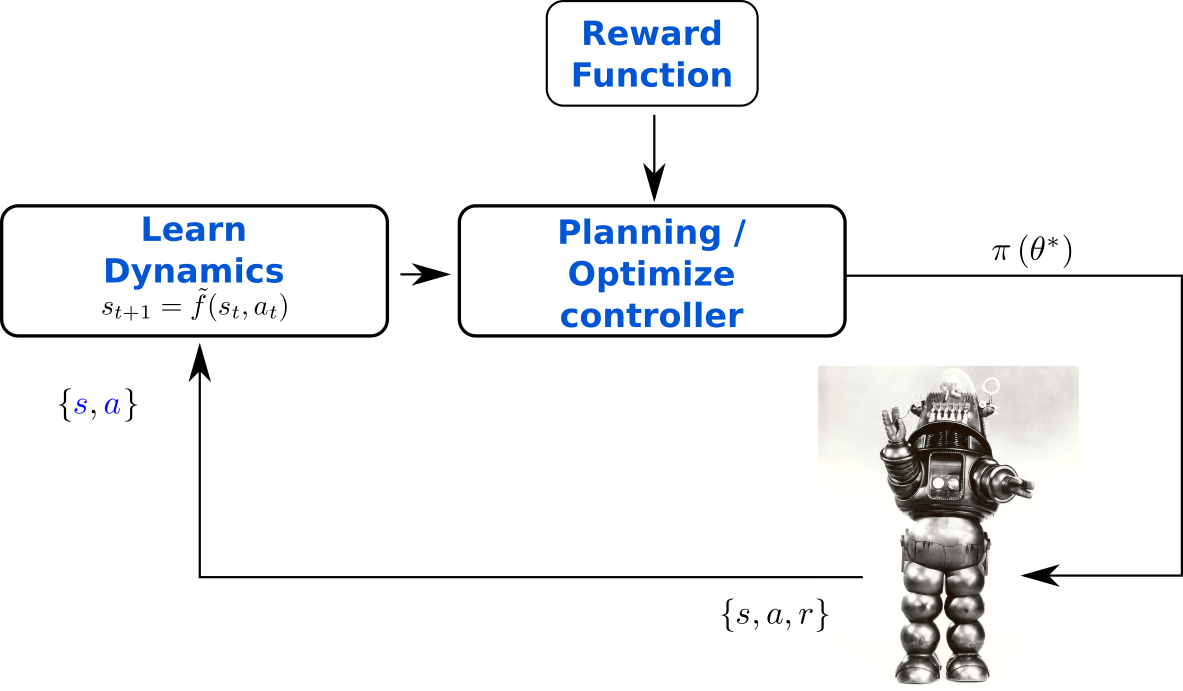
Model-based
Reinforcement Learning
Hardware
Software
Humans seem to make extensive use of predictive models for planning and control *
(e.g., to predict the effects of our actions)
Can artificial agents learn and use predictive models of the world?
Hyphothesis: better predictive capabilities will lead to more efficient adaptation
* [Kawato, M. Internal models for motor control and trajectory planning Current Opinion in Neurobiology , 1999, 9, 718 - 727],
[Gläscher, J.; Daw, N.; Dayan, P. & O'Doherty, J. P. States versus rewards: dissociable neural prediction error signals underlying model-based and model-free reinforcement
learning Neuron, Elsevier, 2010, 66, 585-595]
+
predictive models enable explainability
(by peeking into the beliefs of our models and understand their decisions)
Local convergence guaranteed*
Simple to implement
Computationally light
Does not generalize
Data-inefficient
No convergence guarantees
Challenging to learn model
Computationally intensive
Data-efficient
Generalize to new tasks
Evidence from neuroscience that humans use both approaches! [Daw et al. 2010]
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
1000x
Faster than
Model-free RL
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
Chua, K.; Calandra, R.; McAllister, R. & Levine, S.
Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models
Advances in Neural Information Processing Systems (NIPS), 2018, 4754-4765
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
Bansal, S.; Calandra, R.; Levine, S. & Tomlin, C. J.
MBMF: Model-Based Priors for Model-Free Reinforcement Learning
Withdrawn from Conference on Robot Learning (CORL), 2017
There exist models that are wrong, but nearly optimal when used for control
(NO)
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
- George E.P. Box
- Roberto Calandra
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for DynamIcs & Control (L4DC), 2020
Objective mismatch arises when one objective is optimized in the hope that a second, often uncorrelated, metric will also be optimized.
Negative Log-Likelihood
Task Reward
Deterministic model
Probabilistic model
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for DynamIcs & Control (L4DC), 2020
Historical assumption ported from System Identification
Assumption: Optimizing the likelihood will optimize the reward
Experimental results show that the likelihood of the trained models are not strongly correlated with task performance
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for DynamIcs & Control (L4DC), 2020
How can we give more importance to data that are important for the specific task at hand?
Our attempt: re-weight data w.r.t. distance from optimal trajectory
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for DynamIcs & Control (L4DC), 2020
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
(NO)
(NO)
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for Dynamics and Control (L4DC), 2020, 761-770
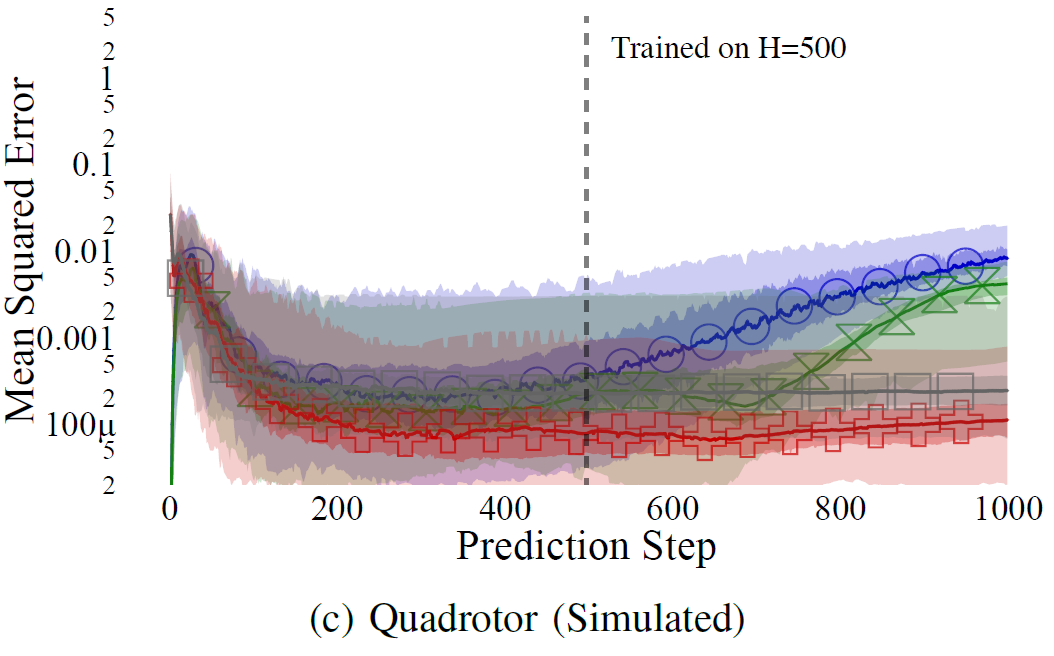
Multiplicative Error -- Doomed to accumulate
Lambert, N.; Wilcox, A.; Zhang, H.; Pister, K. S. J. & Calandra, R.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
IEEE Conference on Decision and Control (CDC), 2021, [available online: https://arxiv.org/abs/2012.09156]
Lambert, N.; Wilcox, A.; Zhang, H.; Pister, K. S. J. & Calandra, R.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
IEEE Conference on Decision and Control (CDC), 2021, [available online: https://arxiv.org/abs/2012.09156]
(from O(t) to O(1) for any given t)
Lambert, N.; Wilcox, A.; Zhang, H.; Pister, K. S. J. & Calandra, R.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
IEEE Conference on Decision and Control (CDC), 2021, [available online: https://arxiv.org/abs/2012.09156]
(YES)
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
(NO)
(NO)
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for Dynamics and Control (L4DC), 2020, 761-770
Zhang, B.; Rajan, R.; Pineda, L.; Lambert, N.; Biedenkapp, A.; Chua, K.; Hutter, F. & Calandra, R.
On the Importance of Hyperparameter Optimization for Model-based Reinforcement Learning
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
Zhang, B.; Rajan, R.; Pineda, L.; Lambert, N.; Biedenkapp, A.; Chua, K.; Hutter, F. & Calandra, R.
On the Importance of Hyperparameter Optimization for Model-based Reinforcement Learning
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
Zhang, B.; Rajan, R.; Pineda, L.; Lambert, N.; Biedenkapp, A.; Chua, K.; Hutter, F. & Calandra, R.
On the Importance of Hyperparameter Optimization for Model-based Reinforcement Learning
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
Lambert, N.; Wilcox, A.; Zhang, H.; Pister, K. S. J. & Calandra, R.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
IEEE Conference on Decision and Control (CDC), 2021, [available online: https://arxiv.org/abs/2012.09156]
(YES)
Zhang, B.; Rajan, R.; Pineda, L.; Lambert, N.; Biedenkapp, A.; Chua, K.; Hutter, F. & Calandra, R.
On the Importance of Hyperparameter Optimization for Model-based Reinforcement Learning
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
(YES)
Bansal, S.; Calandra, R.; Xiao, T.; Levine, S. & Tomlin, C. J.
Goal-Driven Dynamics Learning via Bayesian Optimization
IEEE Conference on Decision and Control (CDC), 2017, 5168-5173
(NO)
(NO)
Lambert, N.; Amos, B.; Yadan, O. & Calandra, R.
Objective Mismatch in Model-based Reinforcement Learning
Learning for Dynamics and Control (L4DC), 2020, 761-770
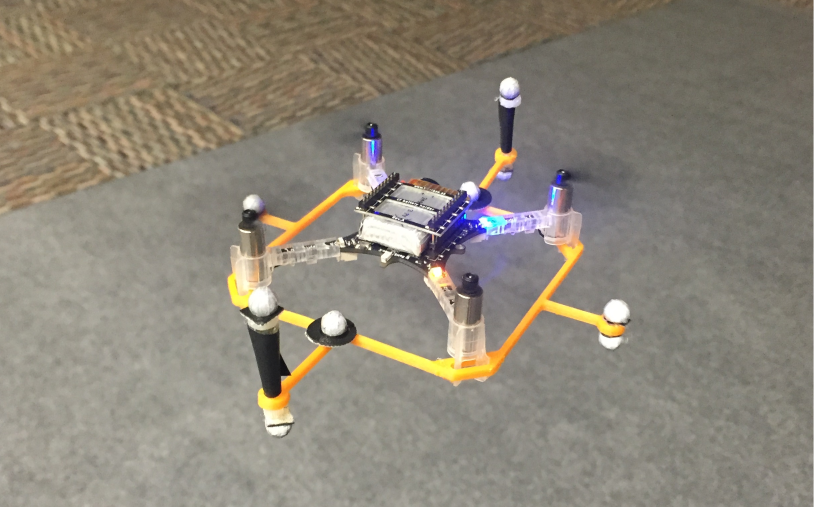
Lambert, N.O.; Drew, D.S.; Yaconelli, J; Calandra, R.; Levine, S.; & Pister, K.S.J.
Low Level Control of a Quadrotor with Deep Model-Based Reinforcement Learning
IEEE Robotics and Automation Letters (RA-L), 2019, 4, 4224-4230
Belkhale, S.; Li, R.; Kahn, G.; McAllister, R.; Calandra, R. & Levine, S.
Model-Based Meta-Reinforcement Learning for Flight with Suspended Payloads
IEEE Robotics and Automation Letters (RA-L), 2021, 6, 1471-1478
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Hierarchical MBRL
Pineda, L.; Amos, B.; Zhang, A.; Lambert, N. O. & Calandra, R.
MBRL-Lib: A Modular Library for Model-based Reinforcement Learning
Arxiv, 2021 https://arxiv.org/abs/2104.10159
Model-based RL is a compelling framework for efficiently learn motor skills
Discussed several theoretical and empirical limitations of current approaches
MBRL-Lib is a new open-source library dedicated to MBRL:
https://github.com/facebookresearch/mbrl-lib
If you are interested in MBRL, I would be delighted to collaborate.
By Roberto Calandra



