






Ronai Lisboa
Curso de Introdução à Física Clássica: Mecânica, Termodinâmica, Fluidos, Ondas e Oscilações e Eletromagnetismo para Bacharelado em Ciências e Tecnologias.
Objetivos
Estudar a relatividade do movimento de Galileu
Calcular a posição, velocidade e aceleração do centro de massa
Estudar os princípios de conservação no referencial do centro de massa
Relatividade de Galileu
O movimento é relativo. Depende do observador.
Fonte: Juan Carlos Casado
Analema Solar
Fonte: Juan Carlos Casado
Eclipse da lua
Mas é possível descrever o movimento independentemente de quem observa um fenômeno?
Relatividade de Galileu
O movimento é relativo. Depende do observador.
Mas é possível descrever o movimento independentemente de quem observa um fenômeno?
Fonte: https://youtu.be/08LS9CEB9qI
Relatividade de Galileu
Dada uma lei física em um certo referencial, qual será sua forma em outro referencial, isto é, como a lei física se transforma ao passarmos de um referencial para outro?
No início do movimento (origem):
As origens coincidem: \(x_{Pe} = x_{Ee} = 0 \) e \(y_{Pe} = y_{Ee} = 0\).
Os relógios estão sincronizados: \(t_{Pe} = t_{Ee} = 0 \).
Relatividade de Galileu
Dada uma lei física em um certo referencial, qual será sua forma em outro referencial, isto é, como a lei física se transforma ao passarmos de um referencial para outro?
As medidas do evento (giz lançado no ar).
Professor: \(x_{Pe}\) e \(t_{Pe}\).
Estudante: \(x_{Ee}\) e \(t_{Ee}\).
Após o deslocamento relativo dos referenciais:
\(t_{Ee}\) = \(t_{Pe}\) = \(t\).
O tempo é absoluto.
Relatividade de Galileu
As equações de transformação de Galileu.
A posição do professor em relação ao evento é igual ao deslocamento relativo do professor em relação ao estudante mais a posição do estudante em relação ao evento.
O deslocamento relativo se dá em um intervalo de tempo \(\Delta t = t_e-0\). Assim,
A equação da relatividade de Galileu fornece:
Relatividade de Galileu
A partir da relatividade de Galileu:
Derivando ambos os lados em relação ao tempo:
A velocidade do evento (e) em relação ao professor (P) é igual à velocidade do evento (e) em relação ao professor (E) mais a velocidade relativa dos referenciais (PE).
referencial do estudante
referencial do professor
Usualmente, essas equações são reescritas (se preferir também), como:
Relatividade de Galileu
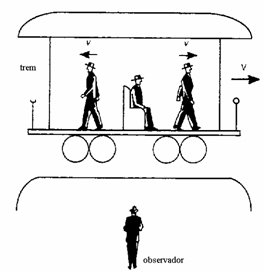
Por exemplo, se um passageiro caminha com velocidade de 5 km/h no corredor de um trem que se deslocada com velocidade de 50 km/h, em relação à estação do trem. Qual será a velocidade do passageiro em relação a essa mesma estação?
Referencial em repouso: A estação (e).
Referencial em movimento: O trem (t). \(v_{et} = 50\) km/h.
Evento: O passageiro (p) caminhando no trem (t). \(v'_{tp} = 5\) km/h.
referencial do passageiro
referencial do observador
Se o passageiro caminha no sentido do movimento do trem:
Se o passageiro caminha no sentido contrário ao movimento do trem:
Relatividade de Galileu
A partir da relatividade de Galileu:
A variação é:
As variações na velocidade do evento (giz) são as mesmas nos dois quadros de referência que se movem a uma velocidade relativa constante.
A aceleração é:
Os dois observadores em movimento com velocidade constante medem a mesma aceleração.
Relatividade de Galileu
A partir da relatividade de Galileu:
Qualquer referencial que se desloca com velocidade constante em relação a ele será também um referencial inercial.
As leis físicas conservam sua forma quando transformadas porque os referenciais são inerciais.
Os dois observadores em movimento com velocidade constante medem a mesma aceleração.
Relatividade de Galileu
Fonte: https://youtu.be/jYMU6bn5GHY
Ponto de Verificação 6.8
Um corredor corre sobre uma esteira cujo cinto se move a \(v_{TBx}\) = + 2,0 m/s em relação à Terra. Considere que a origem do referencial da Terra e do referencial B se movendo junto com a superfície superior do cinto coincidirem em t = 0.
(a) Qual é a posição do corredor no referencial do cinto em t = 10 s?
(b) Use abaixo para mostrar que a medição da posição do corredor por um observador da Terra é \(r_{TJx}\) = 0 em todos os instantes.
evento
ref. repouso
ref. movimento
Ponto de Verificação 6.9
Em um trem que segue para o norte a 3,1 m/s em relação à Terra, um passageiro carregando uma mala caminha para a frente no corredor a 1,2 m/s em relação ao trem. Uma aranha se arrasta ao longo do fundo da mala a 0,5 m/s para o sul em relação à mala. Qual é a velocidade da aranha em relação à Terra?
evento
ref. repouso
ref. movimento
Exemplo 6.6
Você está dirigindo a 25 m/s em uma estrada reta e horizontal quando um caminhão que percorre 30 m/s na mesma direção ultrapassa você. Deixe a direção x positiva apontar na direção da viagem e deixe as origens dos referenciais fixados ao seu carro e ao caminhão coincidirem no instante em que o caminhão o ultrapassar. (a) Qual é a velocidade do seu carro, medida por alguém no caminhão? (b) Qual é a velocidade do caminhão em relação ao seu carro? (c) Qual é a posição do seu carro, medida por alguém no caminhão 60 s depois de ultrapassá-lo?
evento
ref. repouso
ref. movimento
Centro de massa
Obtemos a inércia de um objeto desconhecido (d) colidindo com um objeto de inércia padrão (p):
As variações na velocidade são as mesmas nos dois quadros de referência que se movem a uma velocidade relativa constante \(\Delta v_p = \Delta v_d\). Dois observadores medirão a mesma inércia.
O momento de um objeto medido em dois quadros de referência A e B são relacionados por:
O momento medido no referencial B é diferente do momento medido no quadro de referência A.
Centro de massa
Podemos fazer com que o momento de um sistema de objetos seja zero:
\(m = m_1 + m_2 + \cdots\) é a inércia do sistema.
Se ajustarmos a velocidade \(\vec v_{AB} \) do quadro de referência B em relação ao quadro de referência A:
O quadro de referência B é um quadro de referência de momento zero:
Centro de massa
Em relação à Terra, a velocidade do referencial de momento zero Z para um sistema de objetos é igual ao momento do sistema medido no referencial da Terra dividido pela inércia do sistema:
A velocidade do referencial de momento zero está relacionada à posição do centro de massa de um sistema:
Centro de massa
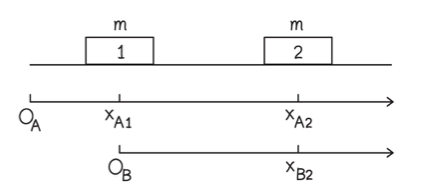
Para determinar o centro de massa de dois objetos de mesma inércia em relação a dois referenciais:
O CM Esta posição está a 1/2 do caminho entre os dois carros.
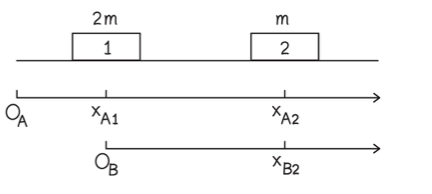
Para inércias diferentes:
O CM Esta posição está a 1/3 do caminho entre os dois carros.
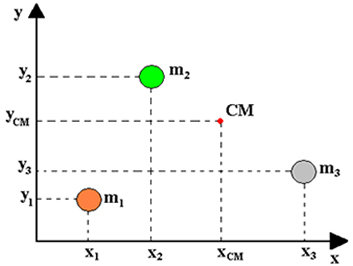
Centro de massa
A posição do centro de massa de um sistema é uma propriedade do sistema independente da escolha do quadro de referência.
A equação sugere que o centro de massa representa uma espécie de posição "média ponderada" de um sistema, mas o centro de massa é mais importante que isso.
O centro de massa nos permite especificar uma posição fixa em um sistema de acordo com uma prescrição exata.
Centro de massa
Para objetos discretos o centro de massa é calculado por meio da equação:
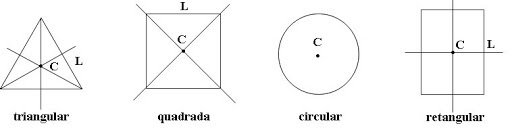
Para objetos simétricos com uma inércia uniformemente distribuída o centro de massa está em um eixo de simetria e em qualquer plano de simetria.
Centro de massa
O centro de massa também é uma ferramenta importante em nossa busca pela simplificação: nos permite ser precisos mesmo para sistemas onde o movimento é complexo.
O movimento do centro de massa não é alterado quando não há uma força externa resultante em um sistema isolado.
O movimento do centro de massa é alterado quando o momento linear do sistema muda.
Fonte: @physicsfun
Energia cinética conversível
A energia cinética de um sistema de partículas no quadro de referência da Terra:
em termos da energia cinética correspondente \(K_{Z sis}\) medida no quadro de referência de momento zero:
onde
Energia cinética conversível
A energia cinética do sistema é soma:
O primeiro termo à direita nesta equação, chamado de energia cinética de translação do sistema, é a energia cinética associada ao movimento do centro de massa do sistema:
Este termo tem a forma da energia cinética de um objeto de inércia m movendo-se à velocidade \(v_{cm}\).
Para um sistema isolado, a energia cinética de translação \(K_{cm}\) não é conversível, o que significa que não pode ser convertida em energia interna. Essa energia cinética é uma função da velocidade do centro de massa do sistema, que não pode mudar para um sistema isolado!
Energia cinética conversível
A energia cinética do sistema é soma:
O segundo termo à direita nesta equação é a energia cinética conversível do sistema.
é a quantidade que pode ser convertida em energia interna sem alterar a dinâmica do sistema.
Com esta última equação, podemos eliminar qualquer referência ao referencial de momento zero, deixando apenas as quantidades medidas no quadro de referência da Terra:
Energia cinética conversível
A energia cinética de um sistema pode ser dividida em uma parte conversível e uma parte não conversível. A parte não conversível é a energia cinética de translação do sistema \(K_{cm} = (1/2)mv_{cm}^2\). O restante da energia cinética é conversível.
Para um sistema de dois objetos em colisão, a energia cinética conversível é:
como:
onde define-se a inércia reduzida (\(\mu\)) do sistema e a velocidade relativa (\(v_{12}\)) dos dois objetos:
Energia cinética conversível
Em uma colisão elástica de dois corpos:
A velocidade relativa inicial dos dois carros é:
A energia cinética conversível:
A energia cinética inicial do sistema é :
A velocidade relativa inicial dos dois carros é:
A energia cinética conversível:
A energia cinética inicial do sistema é :
Energia cinética conversível
Em uma colisão inelástica de dois corpos a rapidez relativa e a energia cinética variam. A energia cinética do sistema:
Este valor representa a quantidade de energia cinética convertida em energia interna durante a colisão inelástica. A variação máxima na energia cinética do sistema ocorre em uma colisão totalmente inelástica \(e = 0\):
Em uma colisão elástica \(e = 1\):
Leis de conservação e relatividade
Para um sistema de dois referenciais, A e B, que se movem a uma velocidade \(v_{AB}\) em relação um ao outro:
Porque uma variação na velocidade no referencial A é a mesma que uma variação no quadro de referência B:
que nos diz que a variação no momento de um objeto é a mesma nos referenciais A e B. Então, para o momento de um sistema de objetos, temos:
As variações no momento de um sistema são as mesmas em quaisquer dois referenciais que se movem a velocidade constante um em relação ao outro.
Leis de conservação e relatividade
A energia interna é uma medida quantitativa de uma mudança de estado e o estado de qualquer objeto ou sistema não pode depender do movimento do observador.
A energia interna deve ser independente do referencial:
Se a velocidade de um objeto no referencial A aumenta para \(v_{Ao, i} + \Delta v_{Ao}\) de um valor inicial \(v_{Ao, i}\), a energia cinética aumenta em um valor:
No quadro referencial B:
Leis de conservação e relatividade
Se a velocidade de um objeto no referencial A aumenta para \(v_{Ao, i} + \Delta v_{Ao}\) de um valor inicial \(v_{Ao, i}\), a energia cinética aumenta em um valor:
No quadro referencial B:
Assim:
o que significa que a variação na energia cinética de um objeto depende do quadro de referência em que essa variação é medida.
Leis de conservação e relatividade
Vamos examinar a energia cinética convertida em energia interna. No quadro de referência A, temos:
Como as velocidades relativas são diferenças nas velocidades, \(v_{B12} = v_{A12}\) e, portanto, a variação na energia cinética do sistema também deve ser a mesma em quaisquer dois referenciais inerciais:
Generalizando o resultado para um sistema de mais de dois objetos, obtemos:
As variações na energia de um sistema são as mesmas em quaisquer dois referenciais que se movem a velocidade constante um em relação ao outro.
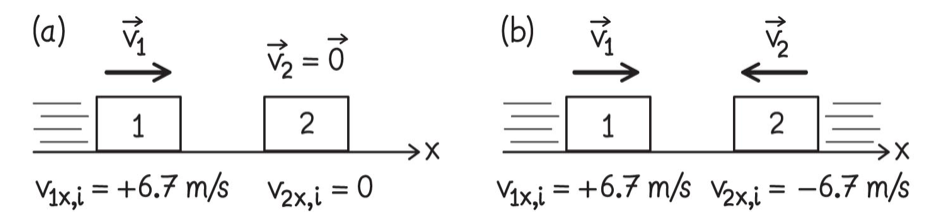
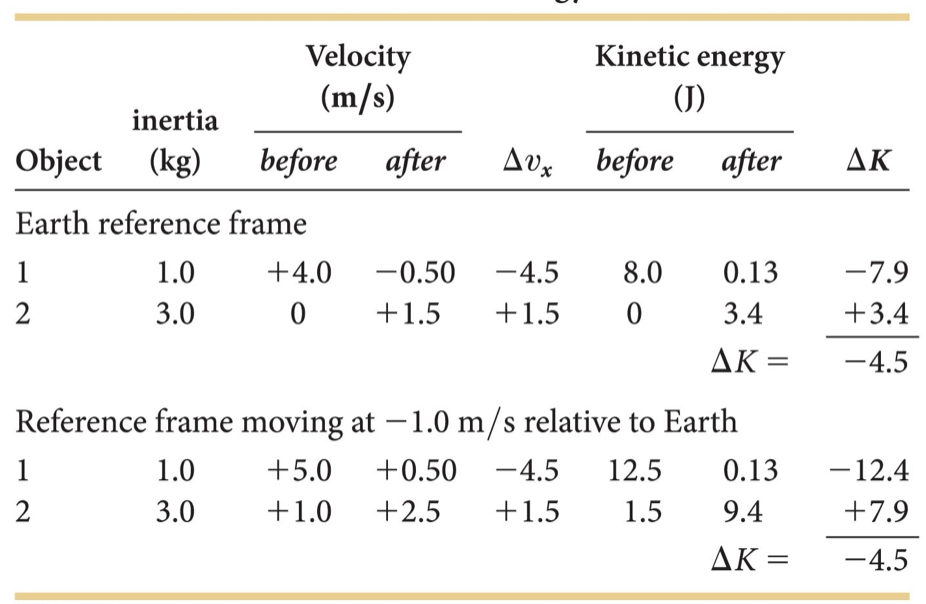
Leis de conservação e relatividade
Objetos 1 \(m_1 = 1,0\) kg e 2 \(m_2 = 3,0\) kg colidem inelasticamente. As velocidades são \(v_{1, i} = +4,0\) m/s, \(v_{2, i} = 0\), \(v_{1, f} = -0,50\) m/s e \(v_{2, f} = +1,5\) m/s. O coeficiente de restituição e:
A energia cinética convertida em energia interna tanto no referencial da Terra quanto em um referencial se movendo em \(v_{EM} = -1,0\) m/s em relação à Terra.
\(v_{12\,i} = |0 - (+ 4,0)| = 4,0 \text{ m/s} \)
\( v_{12\,f} = |(+ 1,5) - (-0,50) = 2,0 \text{ m/s} \)
\( \Rightarrow e = (2,0 \text{ m/s})/(4,0 \text{ m/s}) = 0,50.\)
By Ronai Lisboa
Relatividade de Galileu. Centro de massa. Princípios de conservação do momento linear e da energia cinética no referencial do centro de massa.



