











russtedrake PRO
Roboticist at MIT and TRI
MIT 6.4210/2: Robotic Manipulation
Fall 2022, Lecture 1
Follow live at https://slides.com/d/NNhTngg/live
(or later at https://slides.com/russtedrake/fall22-lec01)
Boyuan Chen
Anthony Simeonov
Ria Sonecha
David Robledo
Nora Jackson
Communications Instructors from Comparative Media Studies/Writing
Recitations Fridays afternoons (starting Sept 16)
Elizabeth Stevens
from the course website:
Matthew T. Mason. Toward Robotic Manipulation. Annual Review of Control, Robotics, and Autonomous Systems, 1:1-28, 2018.
Low-level feedback control from cameras / sensors
(continuous time/state/action)
Scene-understanding +
Task-level Planning
(discrete/symbolic)
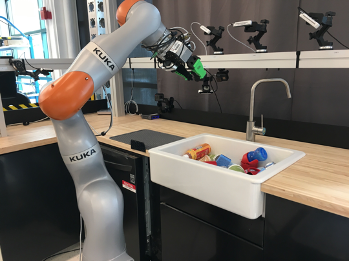
How important is feedback in manipulation?
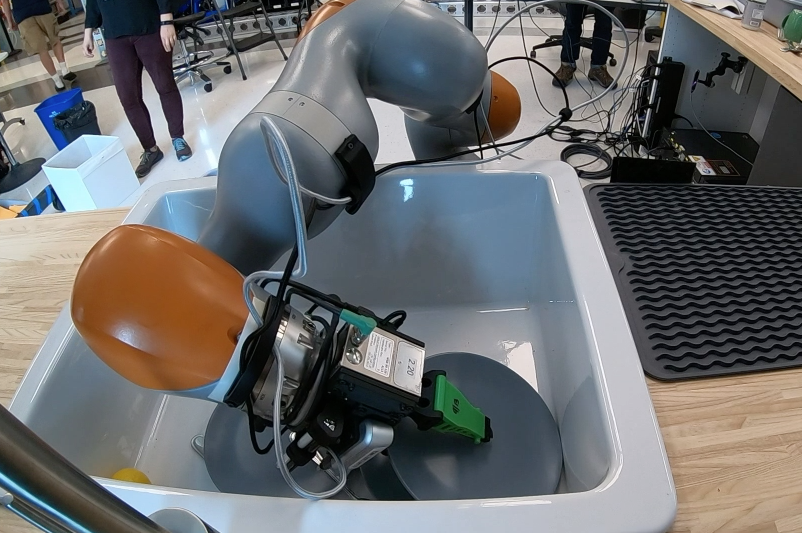
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
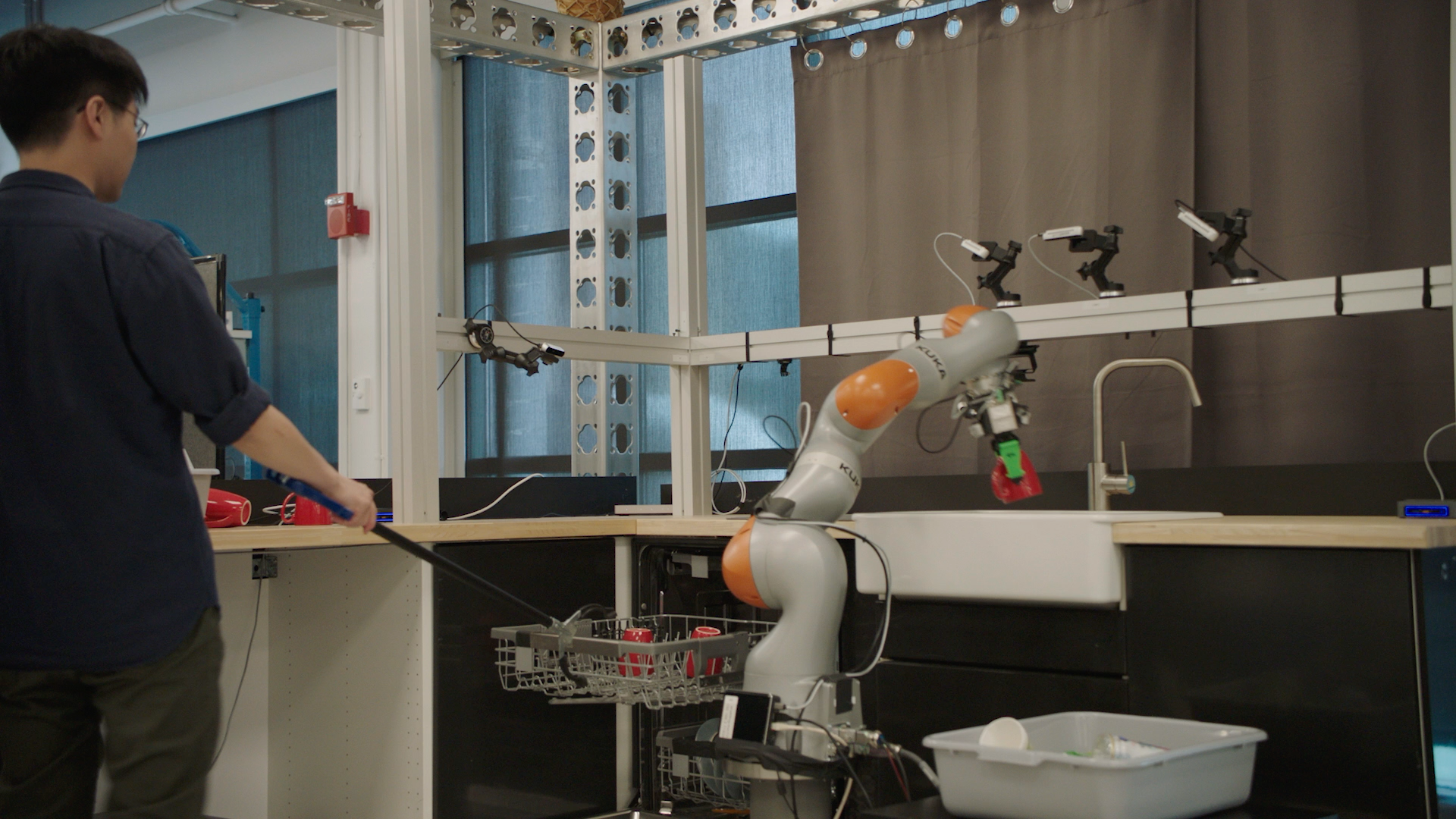
To be clear: we're not just controlling the arm
state of the robot x state of the environment
Manipulation is much more than "pick and place"!
"some interesting failure cases"
(and I promise I'll keep working on getting us a proper room!)
By russtedrake
MIT Robotic Manipulation Fall 2022 http://manipulation.csail.mit.edu


