





russtedrake PRO
Roboticist at MIT and TRI
MIT 6.421:
Robotic Manipulation
Fall 2023, Lecture 15
Follow live at https://slides.com/d/O5ZHL08/live
(or later at https://slides.com/russtedrake/fall23-lec15)
Full derivation is here.
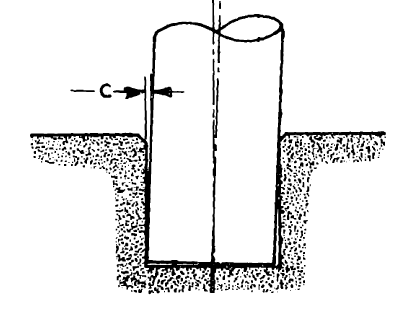
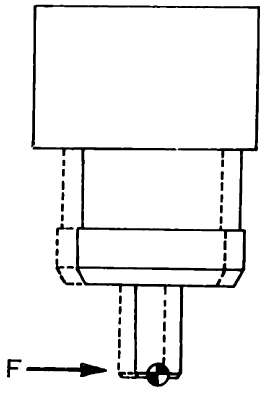
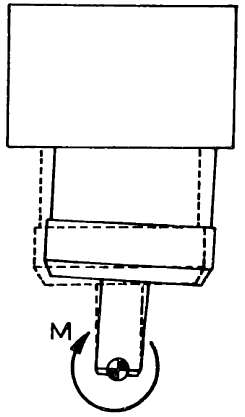
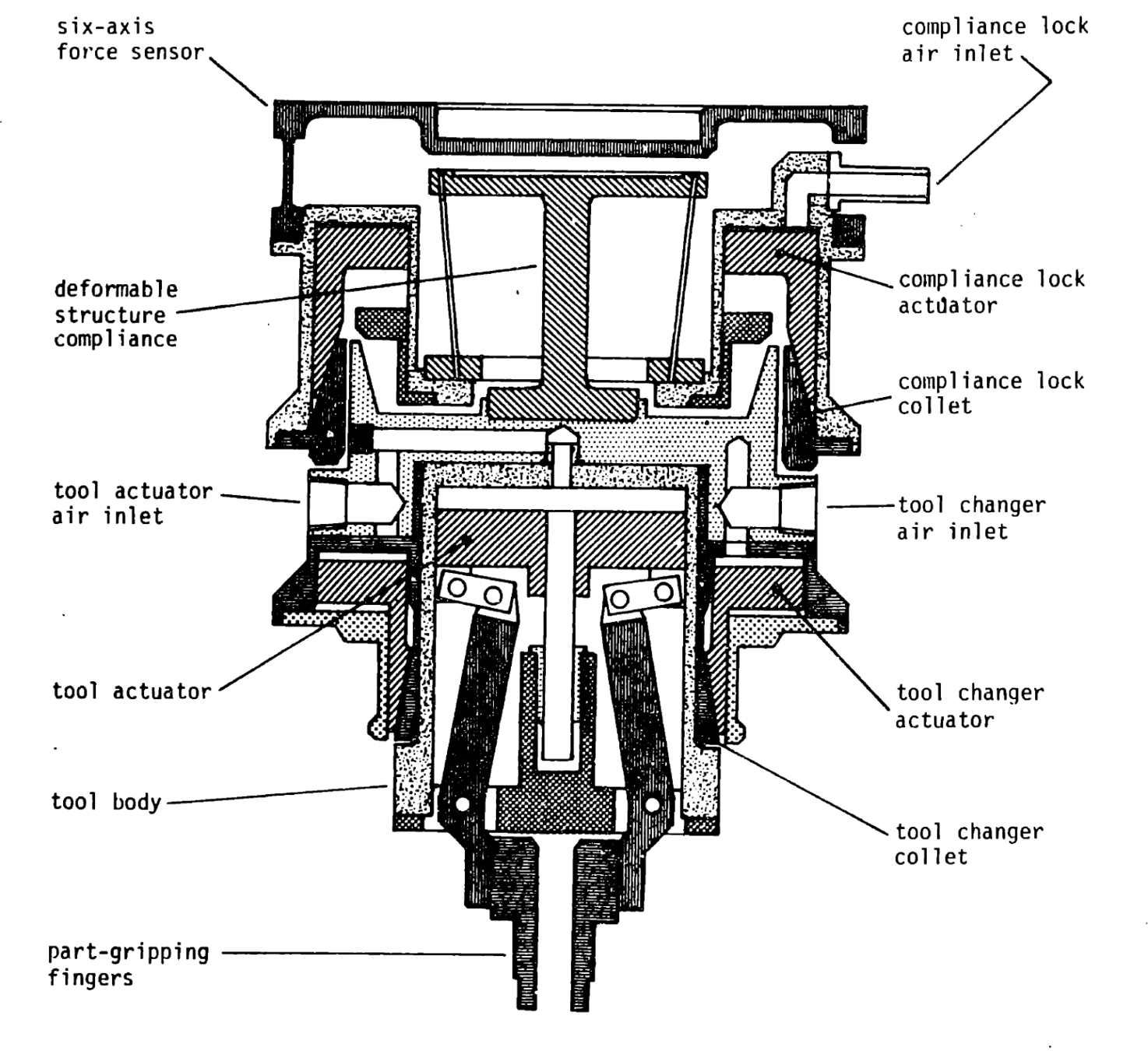
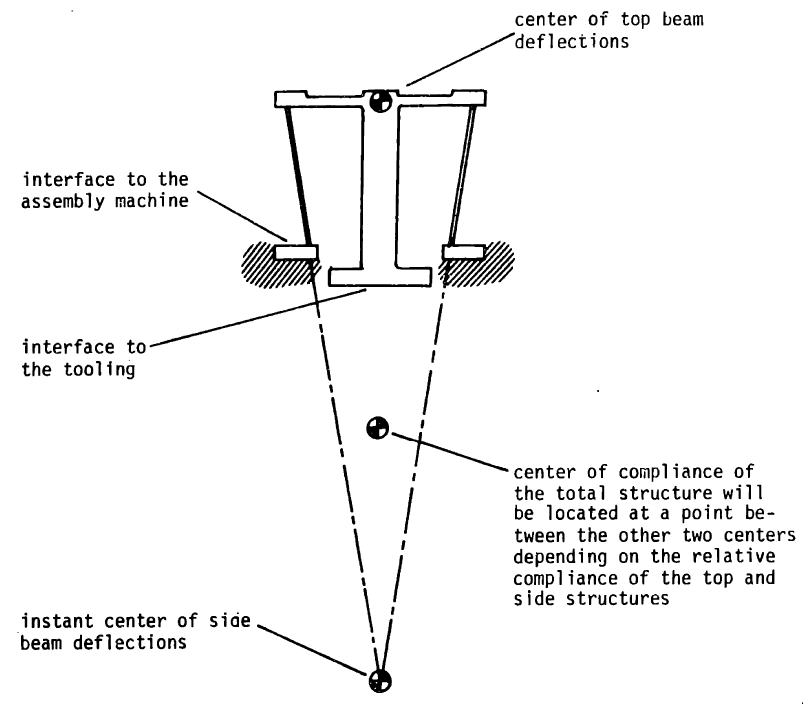
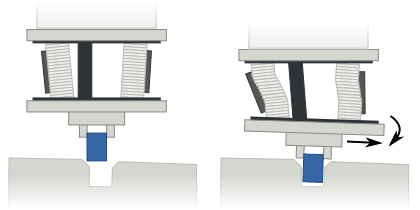
S. H. Drake, “Using compliance in lieu of sensory feedback for automatic assembly.,” Massachusetts Institute of Technology, 1978.
S. H. Drake, “Using compliance in lieu of sensory feedback for automatic assembly.,” Massachusetts Institute of Technology, 1978.
Image credit for Arne Nordmann, 2008
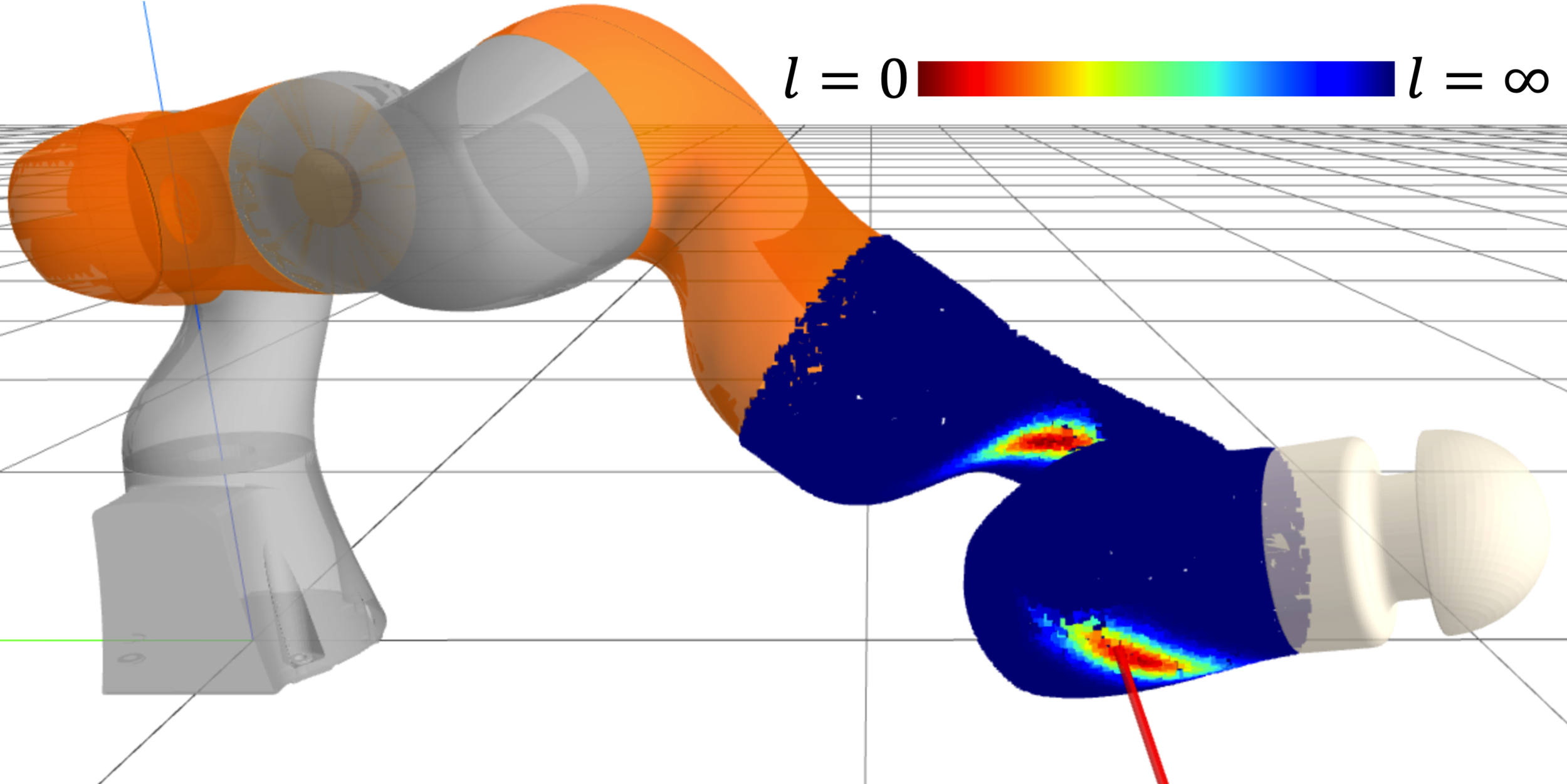
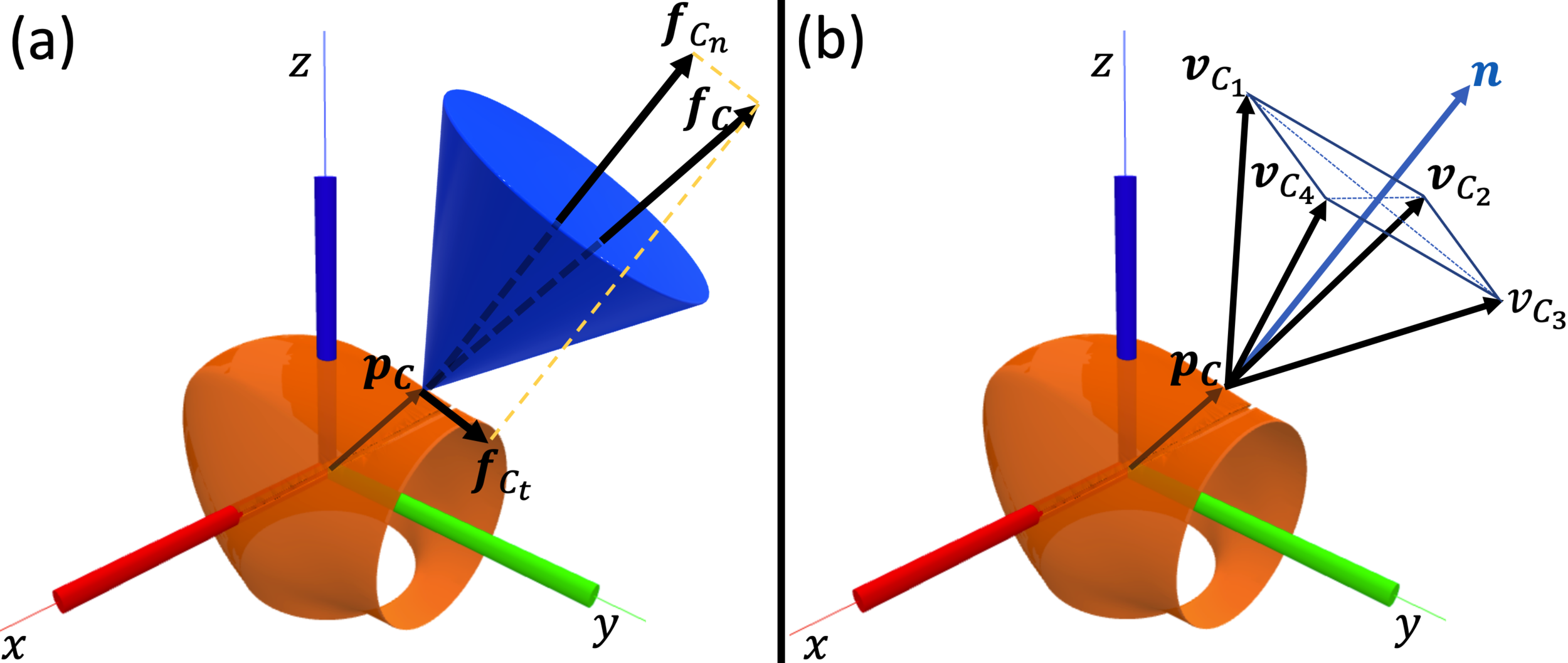
T. Pang et al. Identifying external contacts from joint torque measurements on serial robotic arms and its limitations, ICRA 2021.
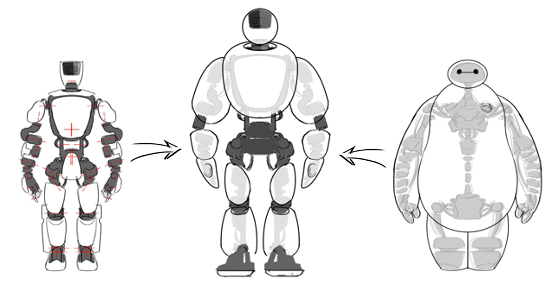
Project PUNYO
ぷにょ
Project PUNYO
ぷにょ
By russtedrake
MIT Robotic Manipulation Fall 2023 http://manipulation.csail.mit.edu


