









russtedrake PRO
Roboticist at MIT and TRI
MIT 6.8210: Underactuated Robotics
Spring 2023, Lecture 11
Follow live at https://slides.com/d/8XRZRcY/live
(or later at https://slides.com/russtedrake/spring23-lec11)
Image credit: Boston Dynamics
def optimize_double_integrator(N):
# Discrete-time approximation of the double integrator.
dt = 0.01
A = np.eye(2) + dt * np.mat("0 1; 0 0")
B = dt * np.mat("0; 1")
prog = MathematicalProgram()
# Create decision variables
u = prog.NewContinuousVariables(1, N-1, "u")
x = prog.NewContinuousVariables(2, N, "x")
# Add constraints
x0 = [-2, 0]
prog.AddBoundingBoxConstraint(x0, x0, x[:, 0])
for n in range(N - 1):
prog.AddConstraint(eq(x[:, n + 1], A.dot(x[:, n]) + B.dot(u[:, n])))
prog.AddBoundingBoxConstraint(-1, 1, u[:, n])
prog.AddQuadraticCost(u[0,n]**2, True)
xf = [0, 0]
prog.AddBoundingBoxConstraint(xf, xf, x[:, N - 1])
result = Solve(prog)
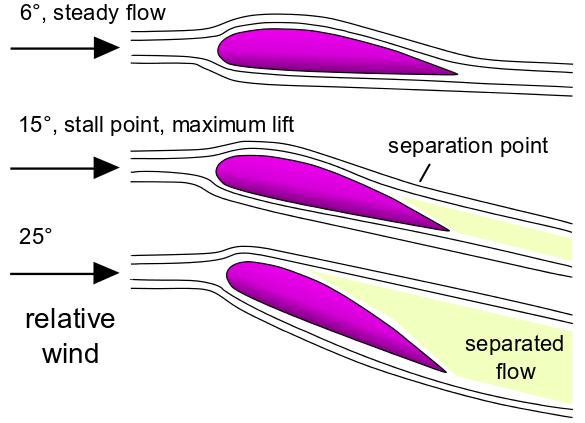
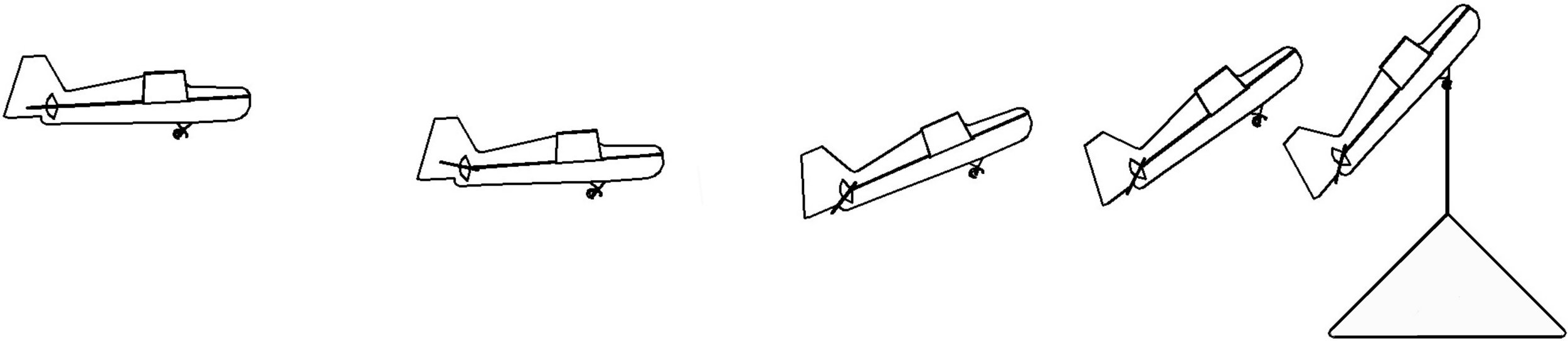
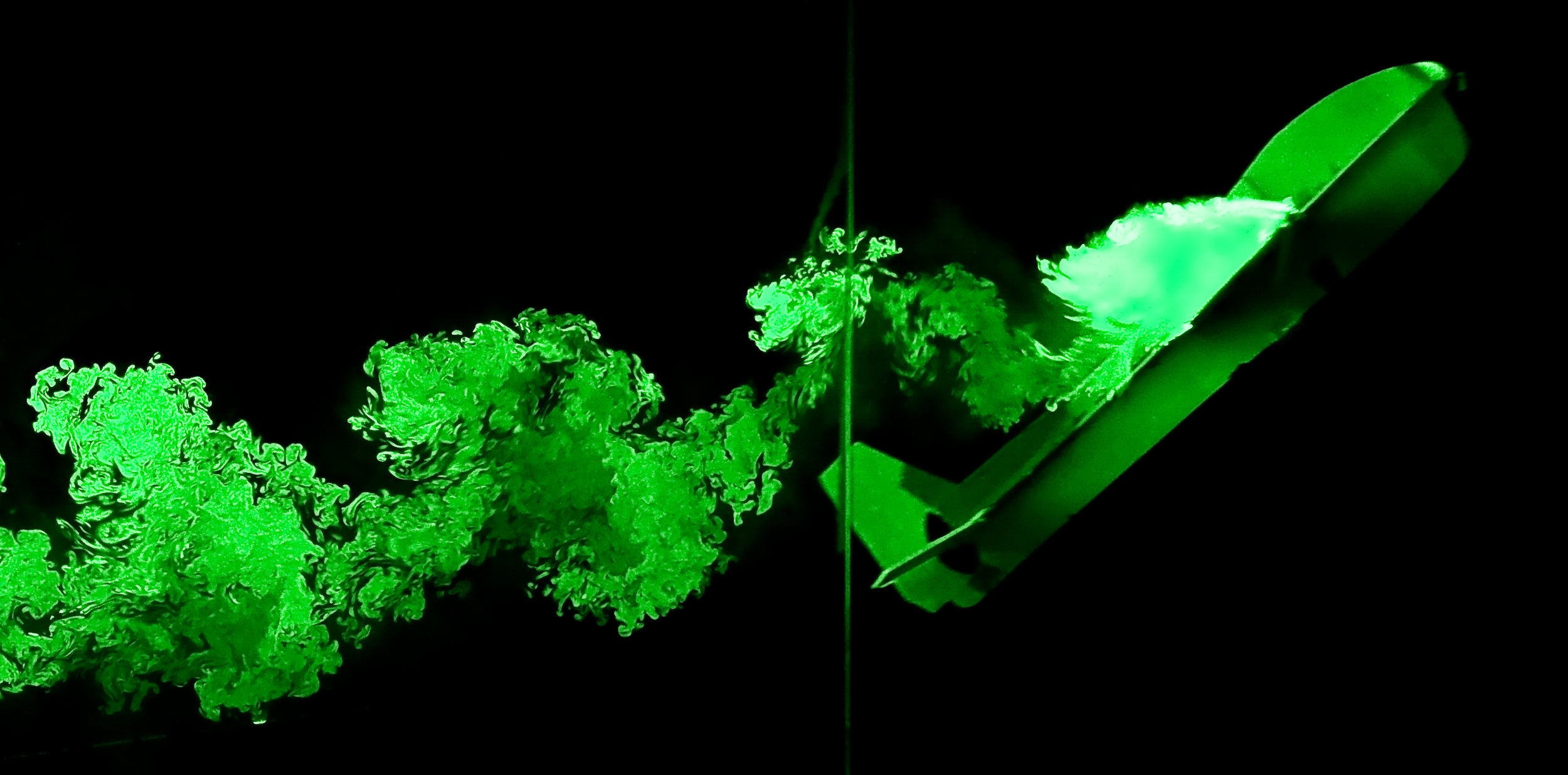
https://en.wikipedia.org/wiki/Stall_(fluid_dynamics)
| Vehicle | Average C_D |
|---|---|
| Boeing 747 | 0.16 |
| X-31 | 0.3 |
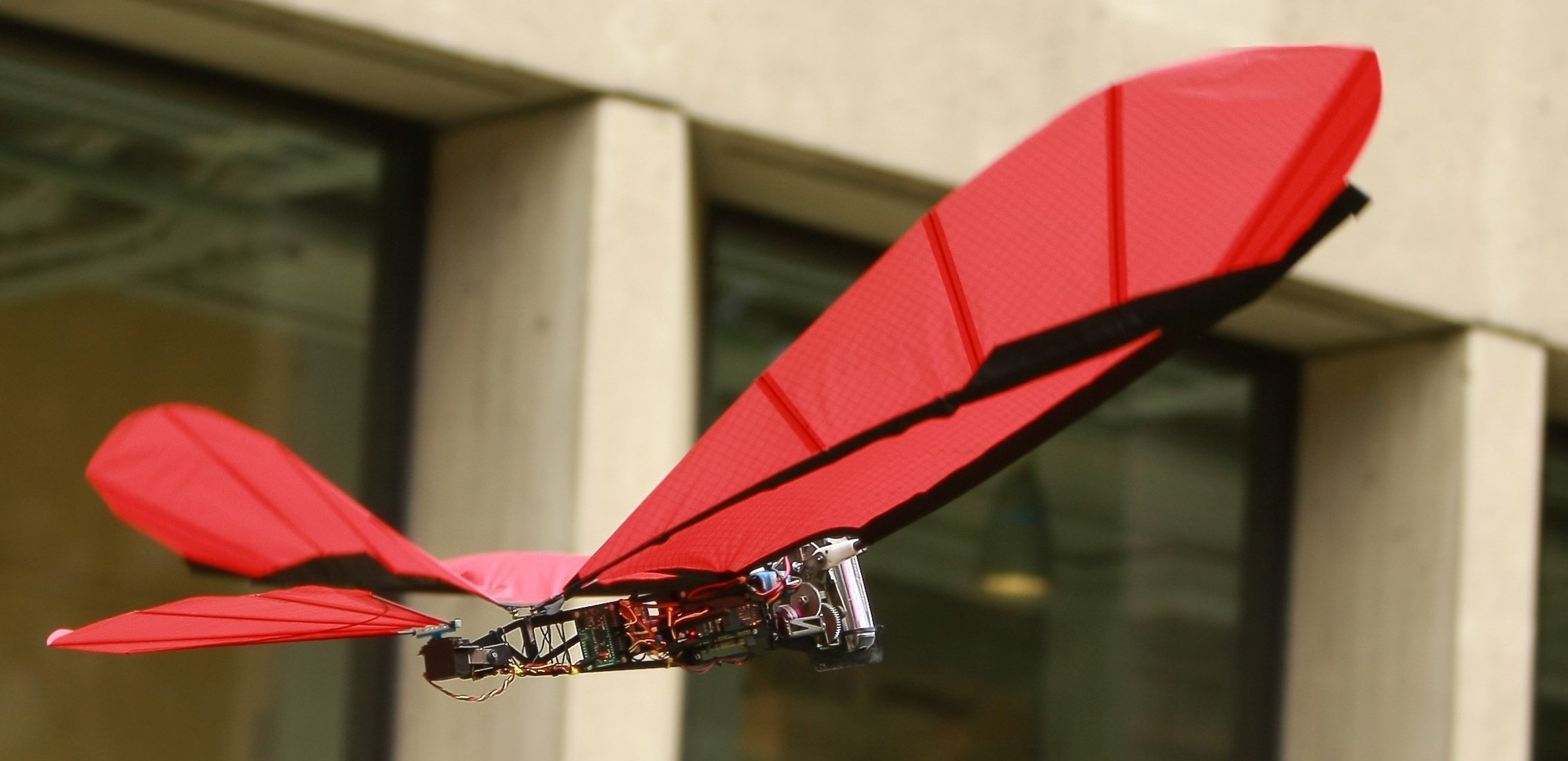
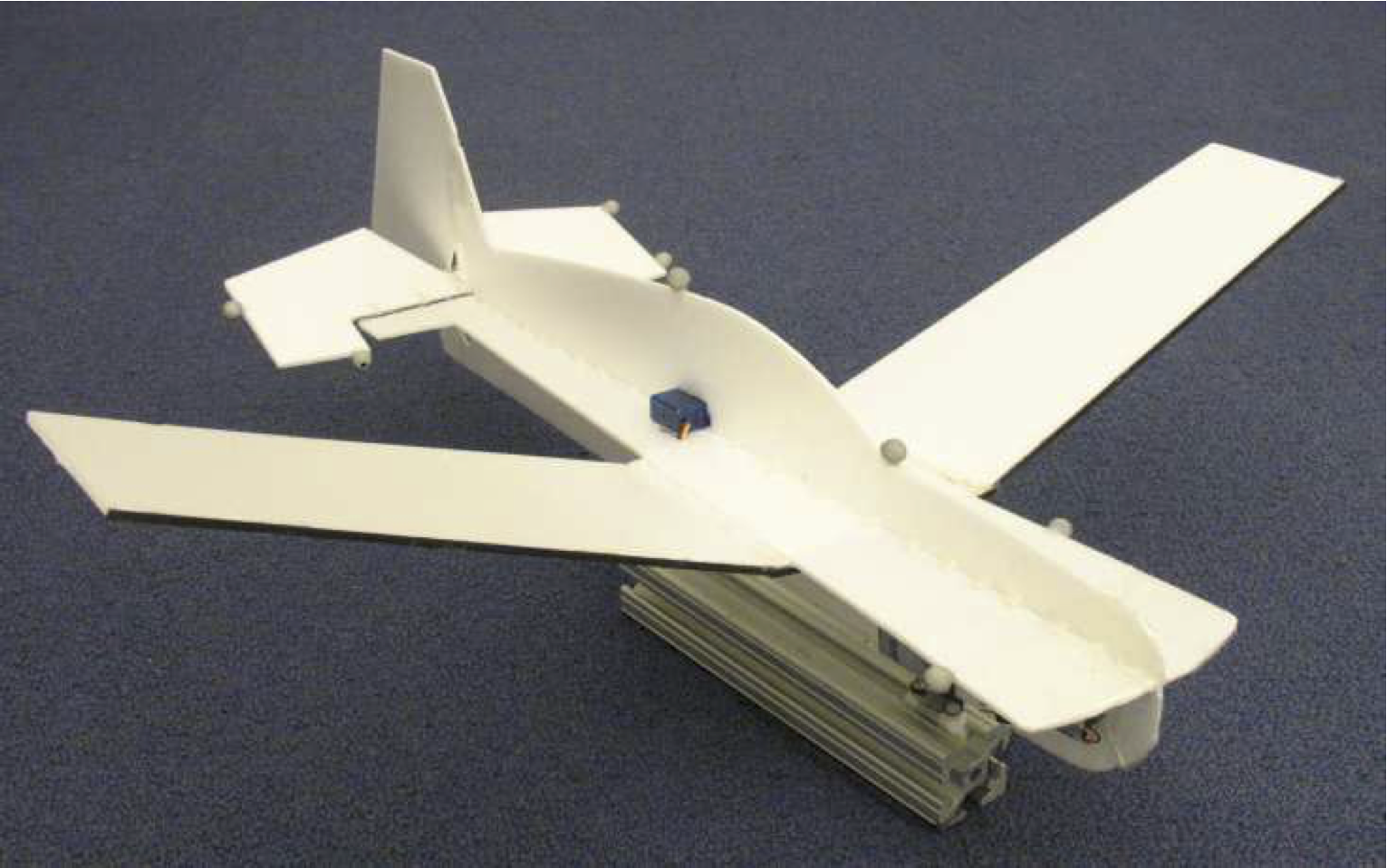
| Cornell Perching Plane | 0.25 |
| Common pigeon | 10 |
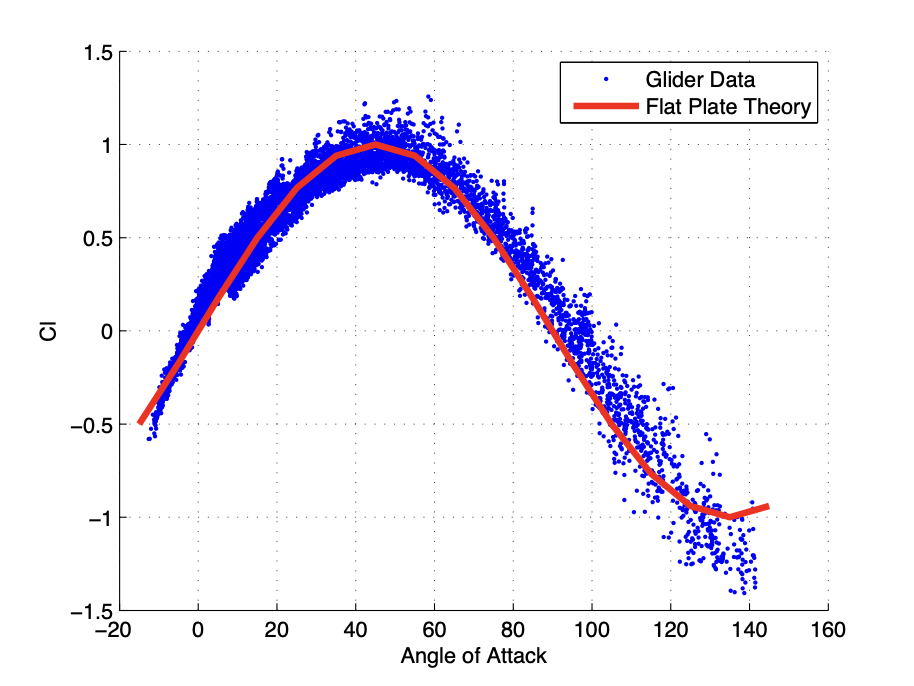
Lift Coefficient
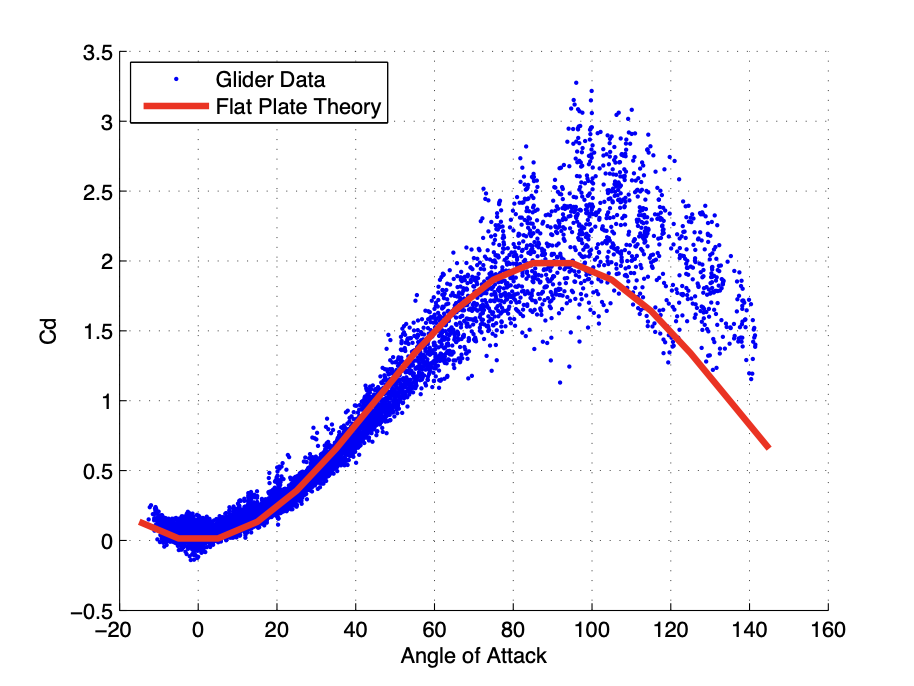
Drag Coefficient
| Vehicle | Average C_D |
|---|---|
| Boeing 747 | 0.16 |
| X-31 | 0.3 |
| Cornell Perching Plane | 0.25 |
| Common pigeon | 10 |
| Our glider | 1.1 |
| Cobra maneuver (Mig) | 0.9 |
By russtedrake
MIT Underactuated Robotics Spring 2023 http://underactuated.csail.mit.edu


