







russtedrake PRO
Roboticist at MIT and TRI
MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 11
Follow live at https://slides.com/d/jgUEwKM/live
(or later at https://slides.com/russtedrake/spring22-lec11)
Image credit: Boston Dynamics
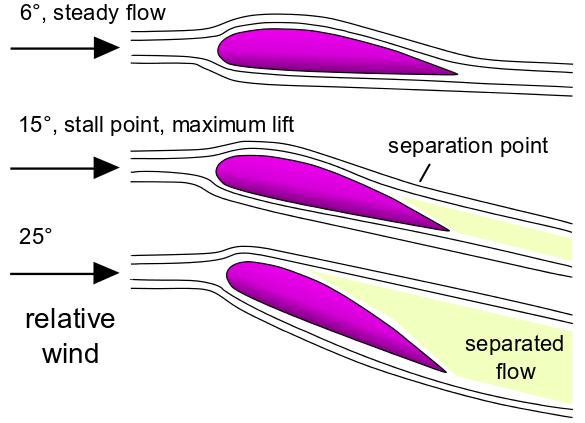
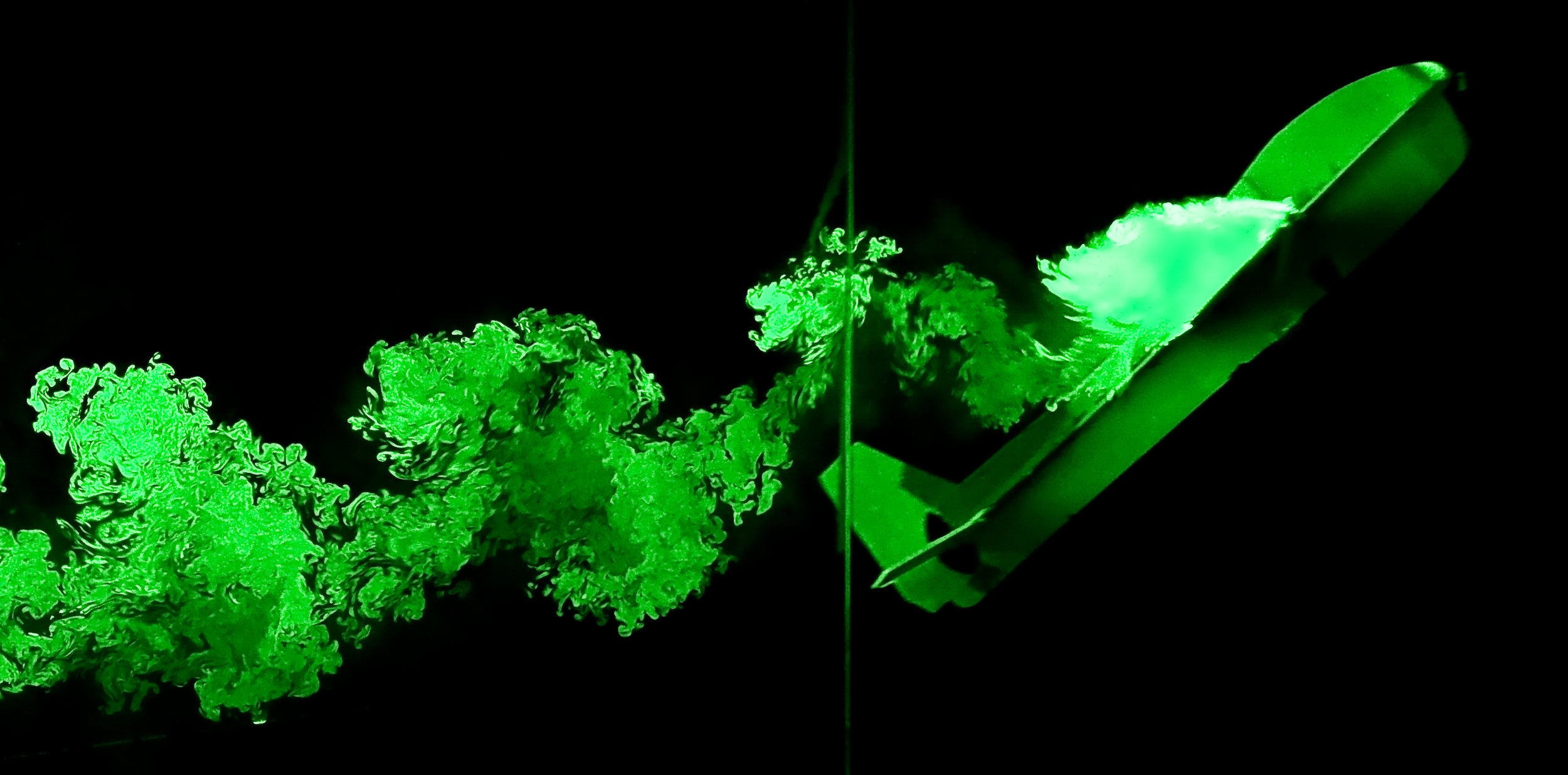
https://en.wikipedia.org/wiki/Stall_(fluid_dynamics)
| Vehicle | Average C_D |
|---|---|
| Boeing 747 | 0.16 |
| X-31 | 0.3 |
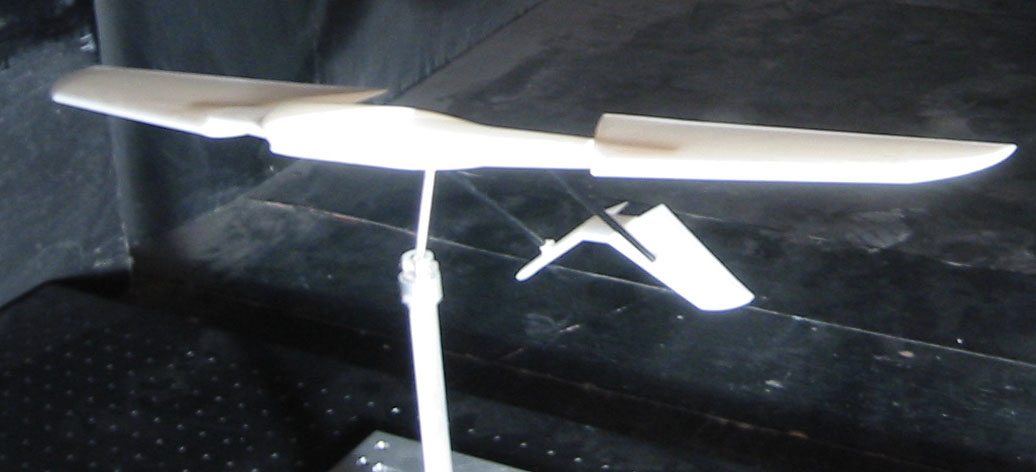
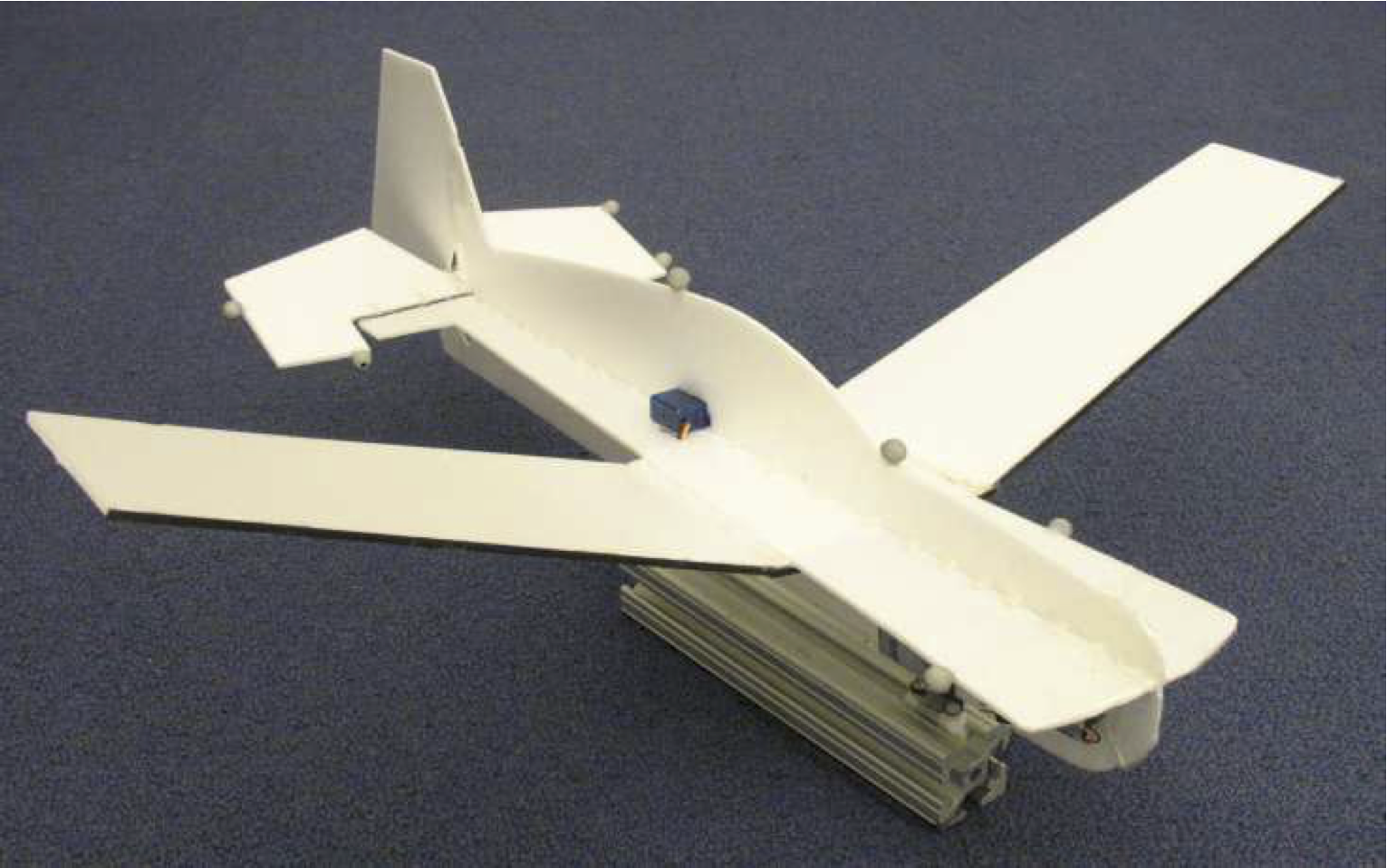
| Cornell Perching Plane | 0.25 |
| Common pigeon | 10 |
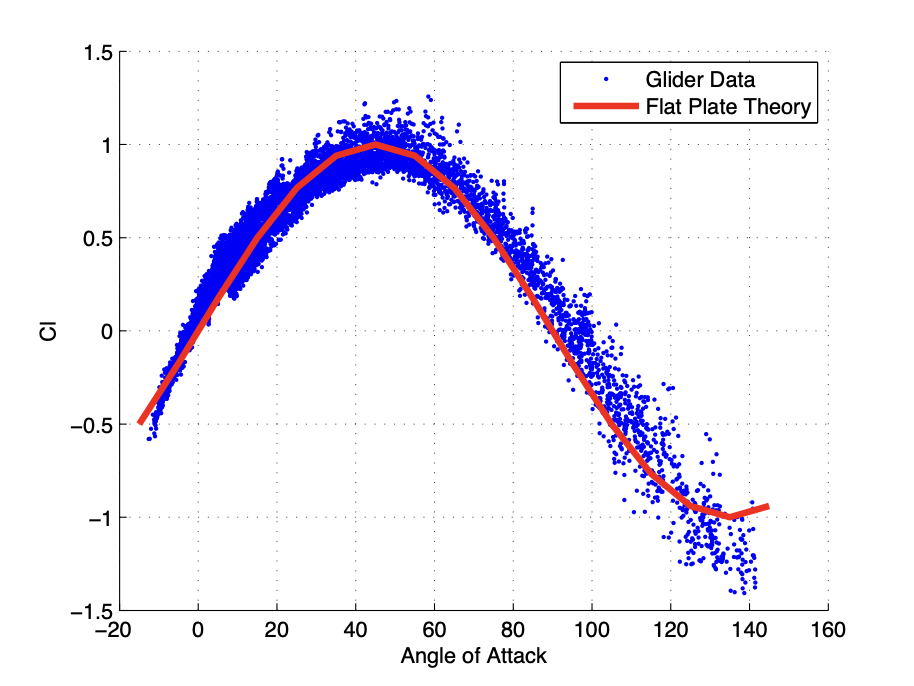
Lift Coefficient
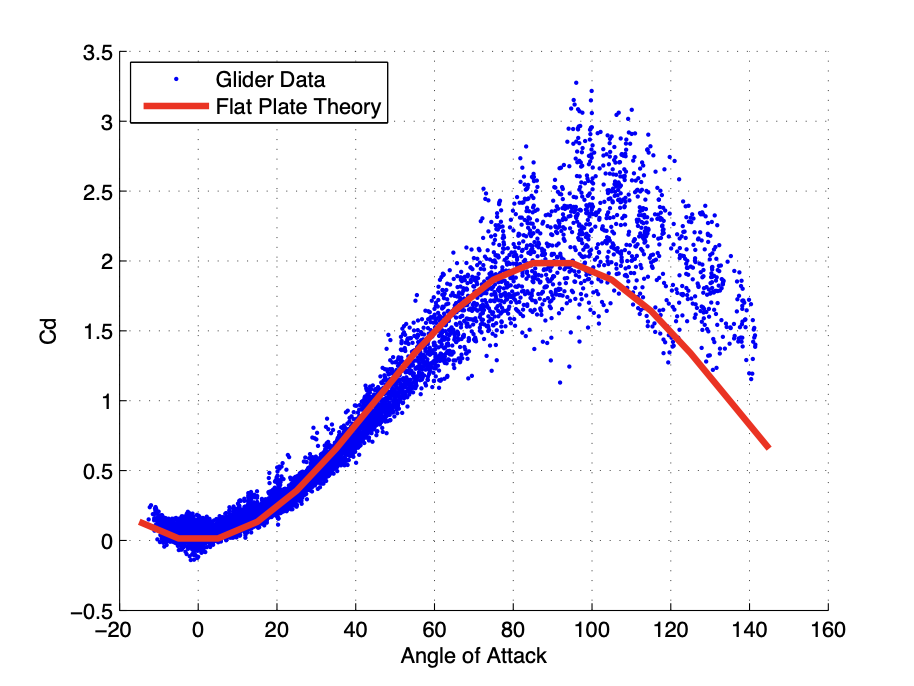
Drag Coefficient
| Vehicle | Average C_D |
|---|---|
| Boeing 747 | 0.16 |
| X-31 | 0.3 |
| Cornell Perching Plane | 0.25 |
| Common pigeon | 10 |
| Our glider | 1.1 |
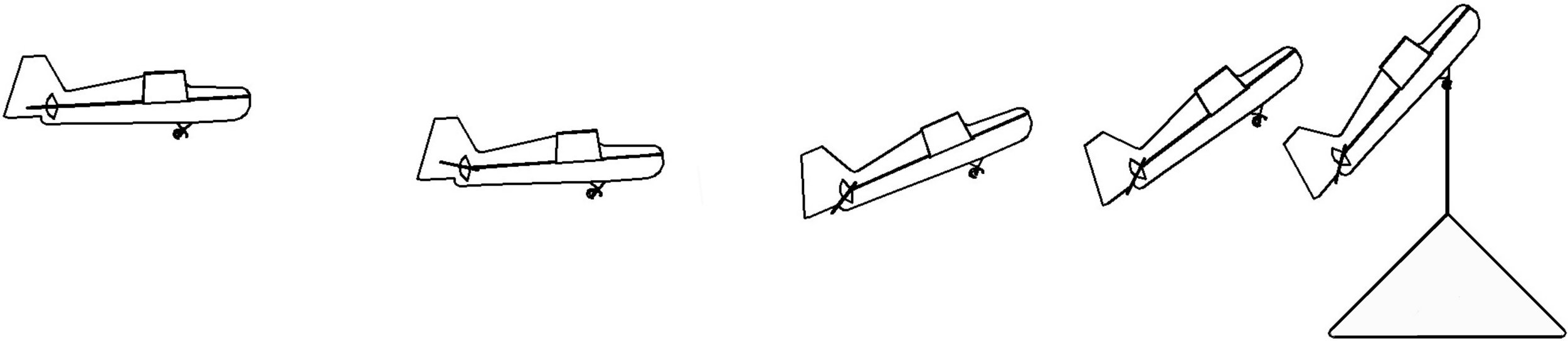
| Cobra maneuver (Mig) | 0.9 |
By russtedrake
MIT Underactuated Robotics Spring 2021 http://underactuated.csail.mit.edu


