










russtedrake PRO
Roboticist at MIT and TRI
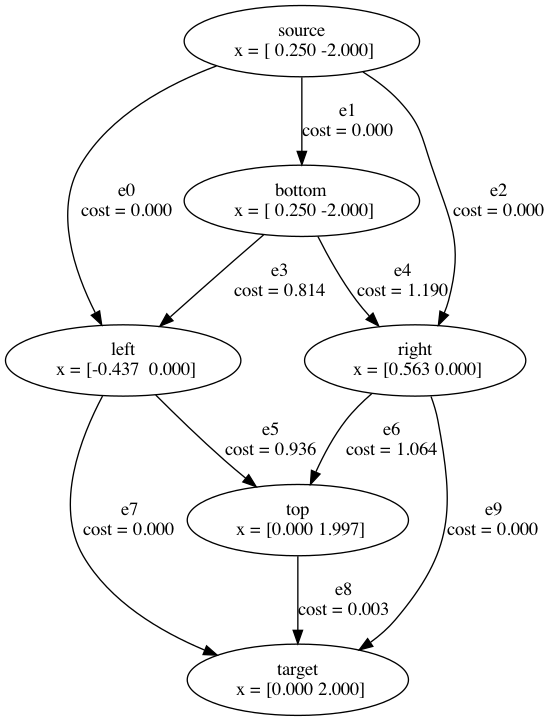
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
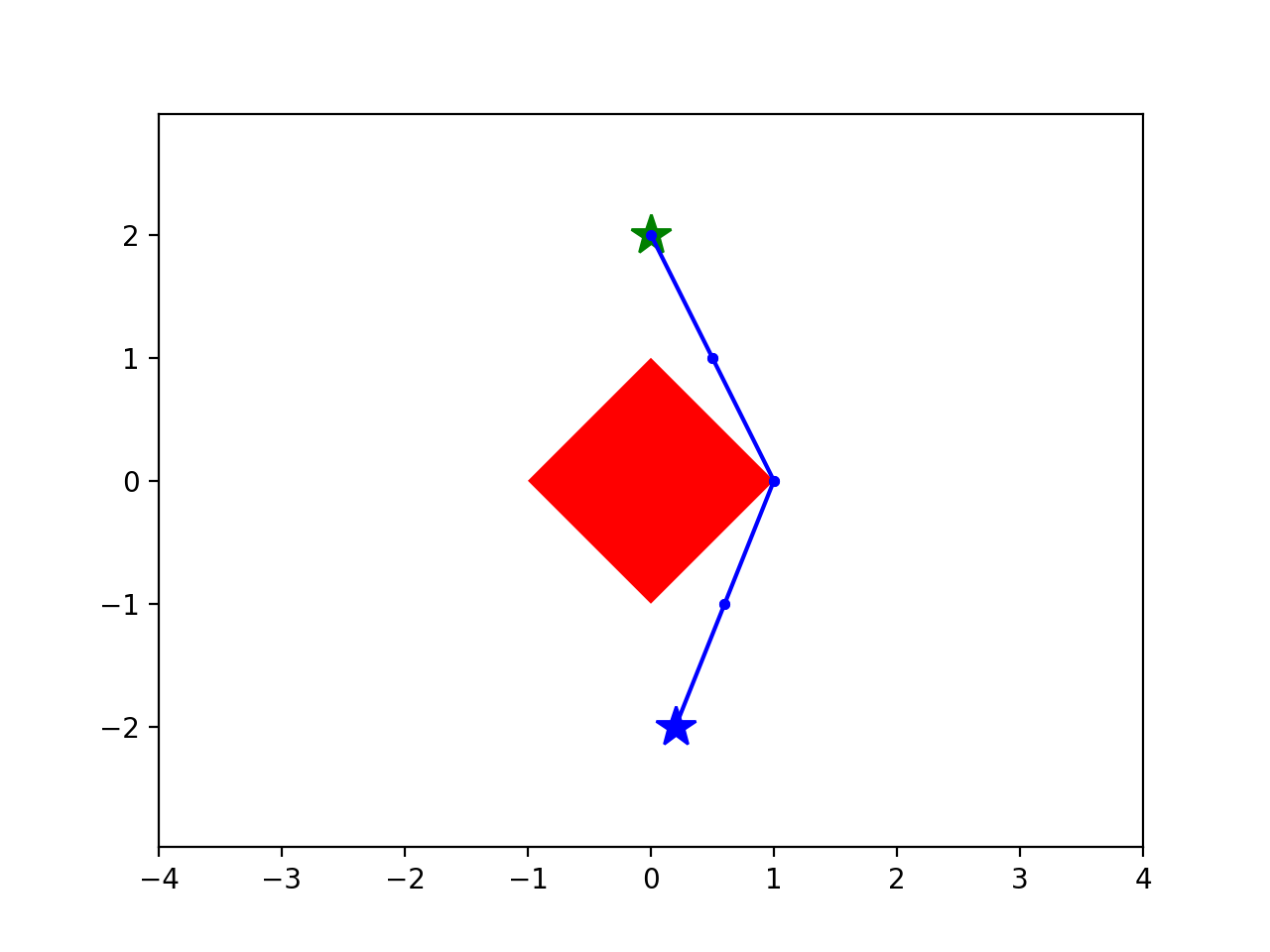
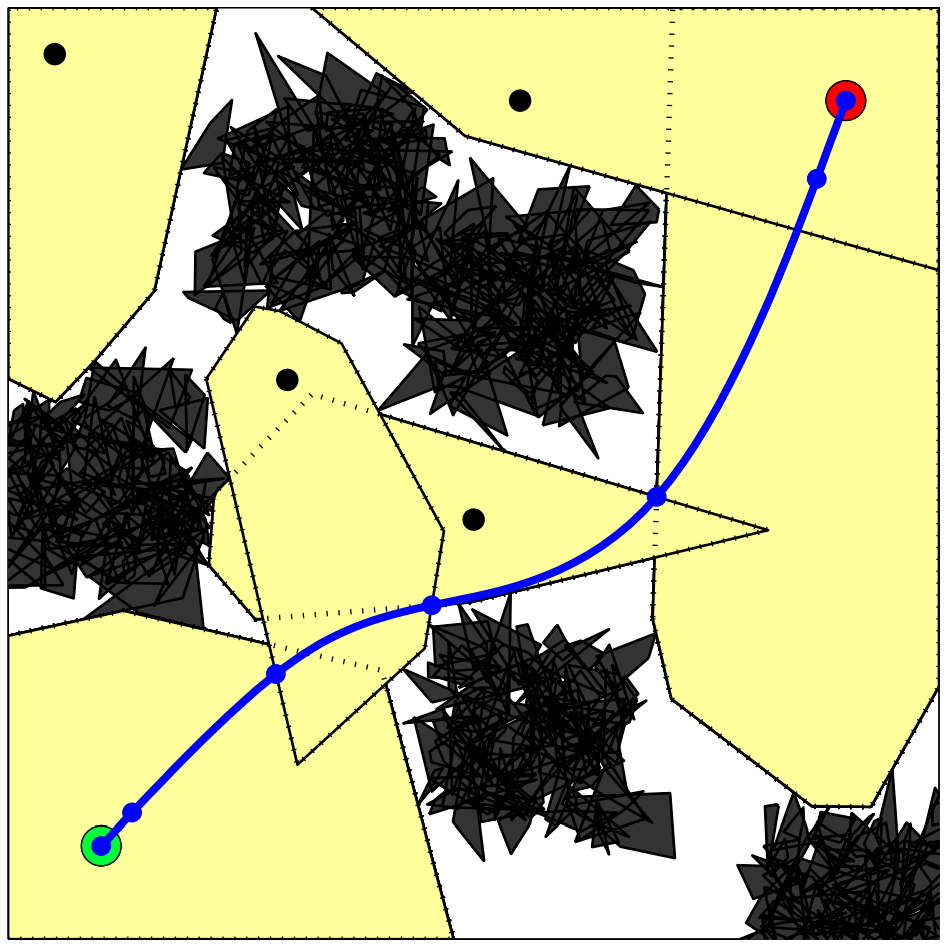
start
goal
Default playback at .25x
Preprocessor now makes easy optimizations fast!
Kinematic Trajectory Optimization
(for robot arms)
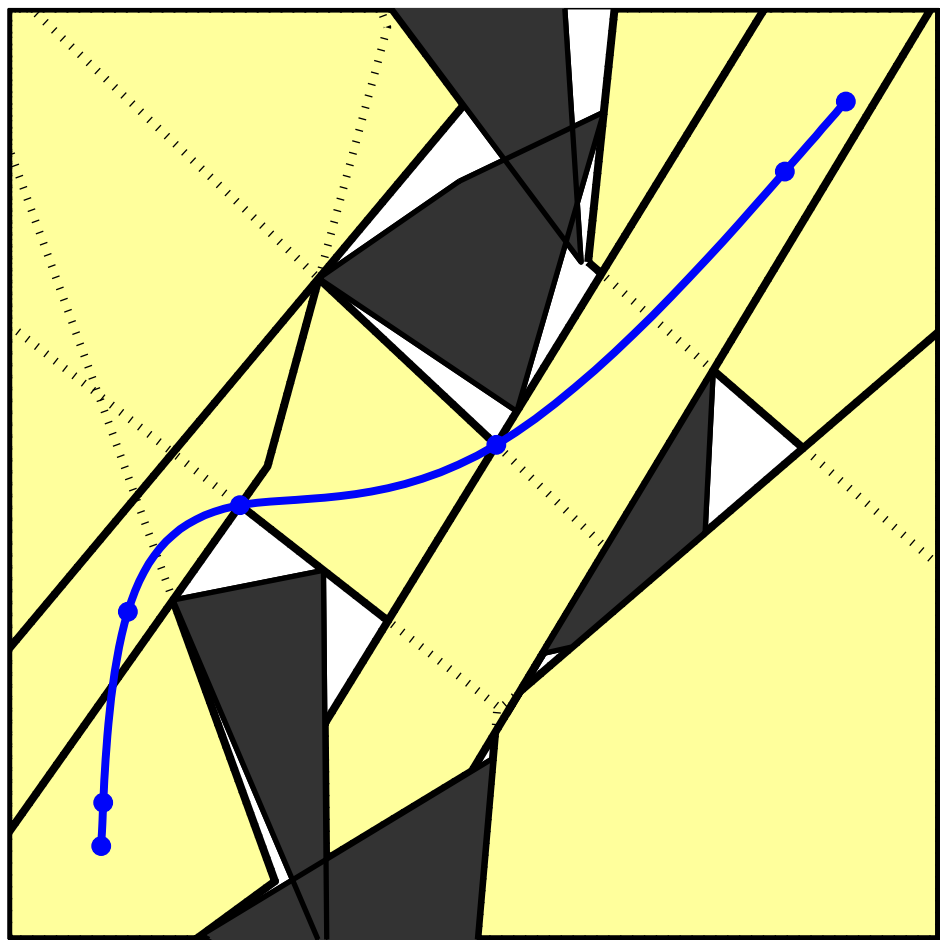
Note: The blue regions are not obstacles.
start
goal
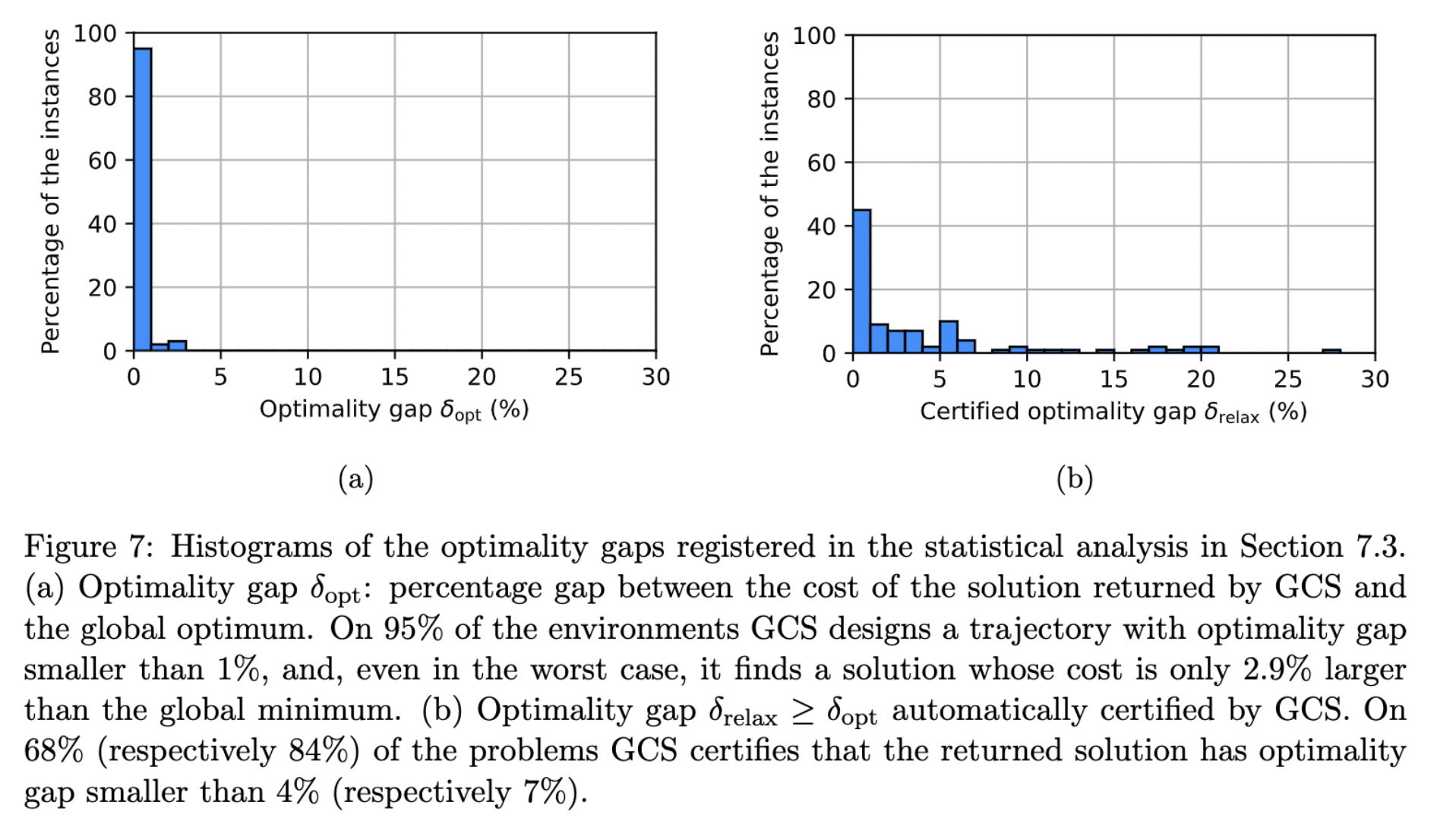
This is the convex relaxation
(it is tight!).
is the convex relaxation. (it's tight!)
Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
Transcription to a mixed-integer convex program, but with a very tight convex relaxation.
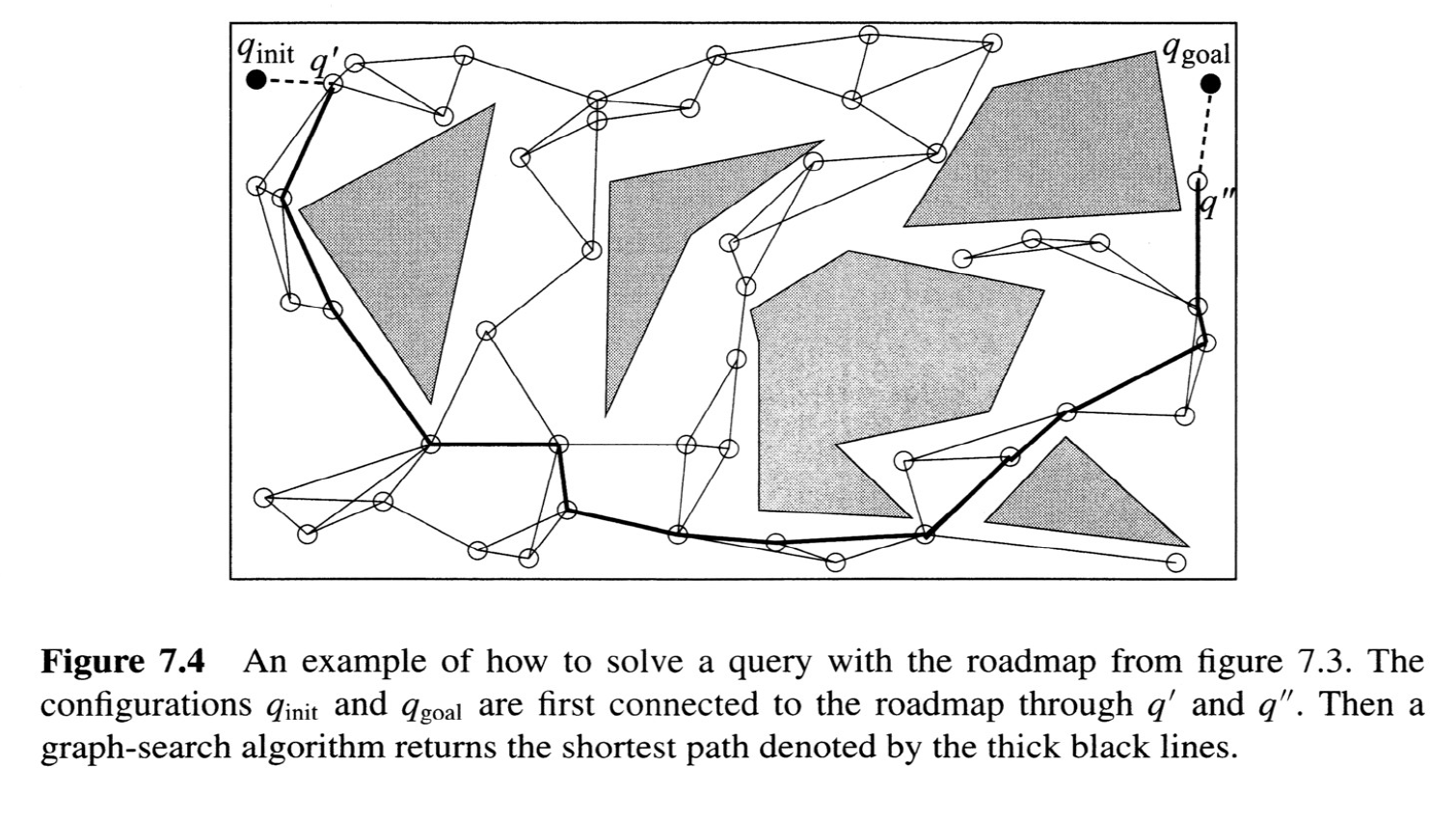
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
...and they are now deeply connected in the optimization.
By russtedrake



