







russtedrake PRO
Roboticist at MIT and TRI
Tobia Marcucci*, Mark Petersen*, David von Wrangel, Russ Tedrake*. In preparation.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake. Shortest Paths in Graphs of Convex Sets. On arxiv. Submitting to TAC (hopefully this week).
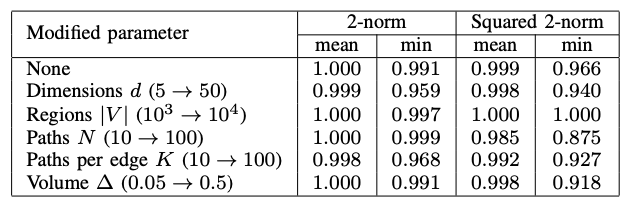
is the convex relaxation. (it's tight!)
| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
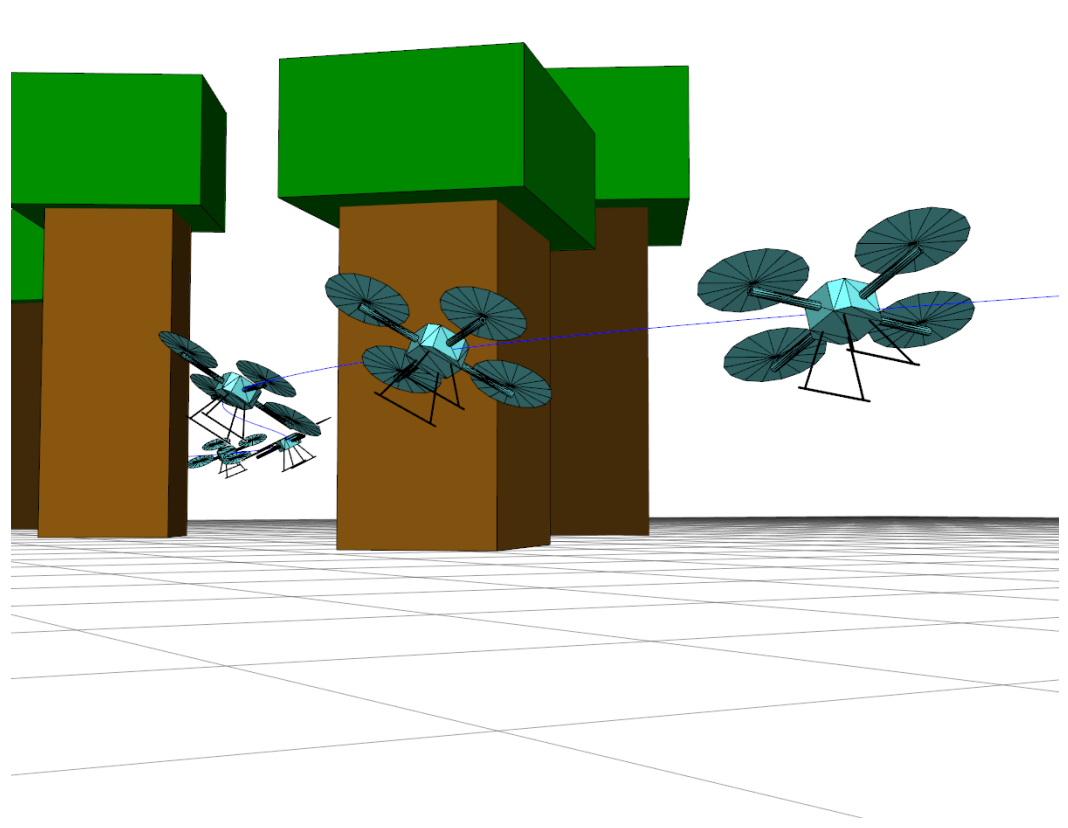
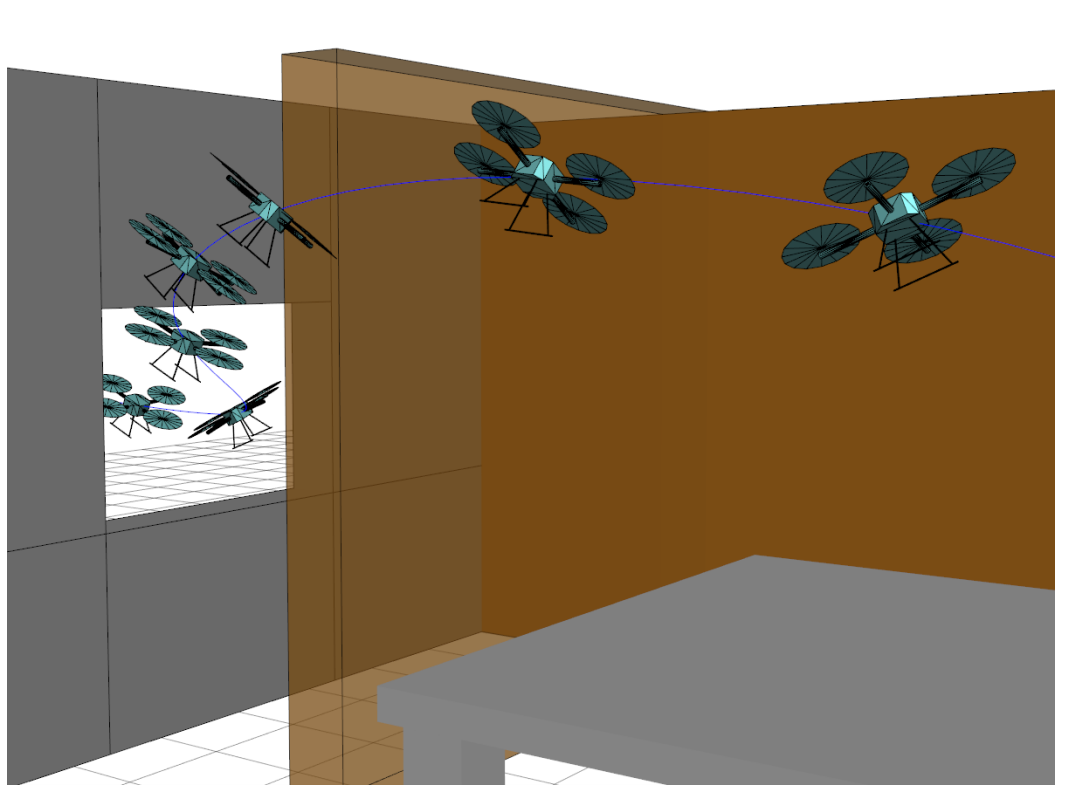
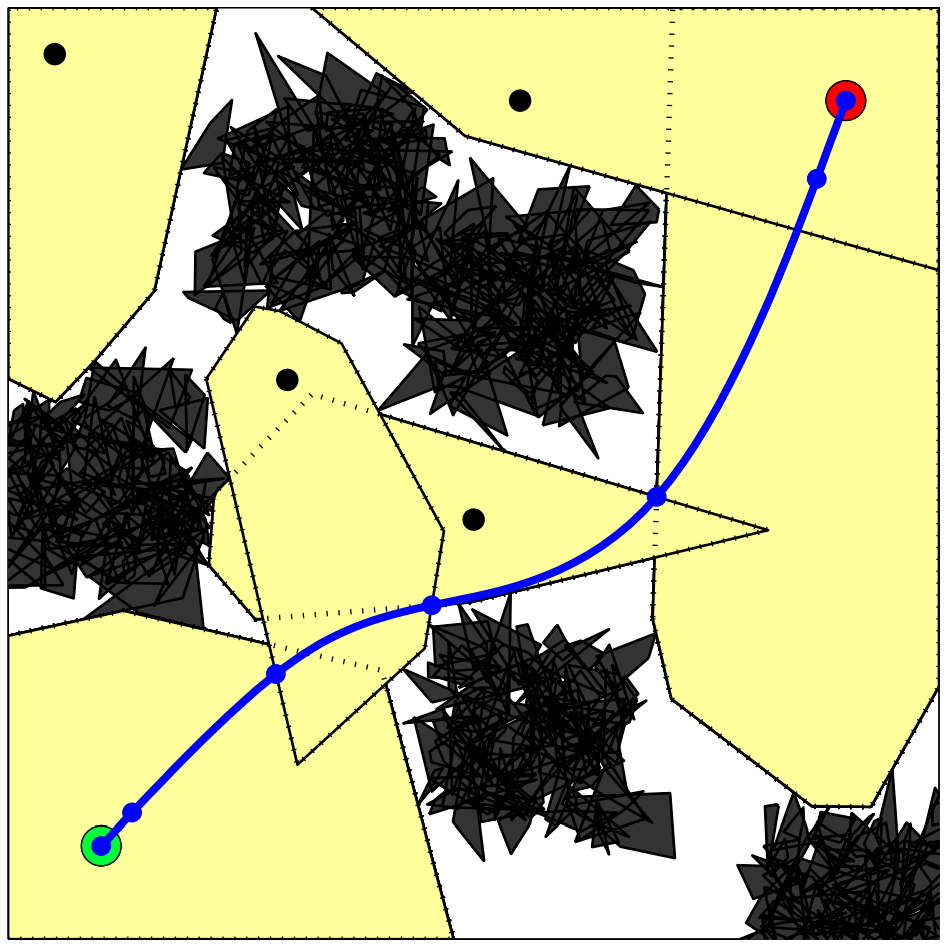
Collision-free planning with dynamic constraints
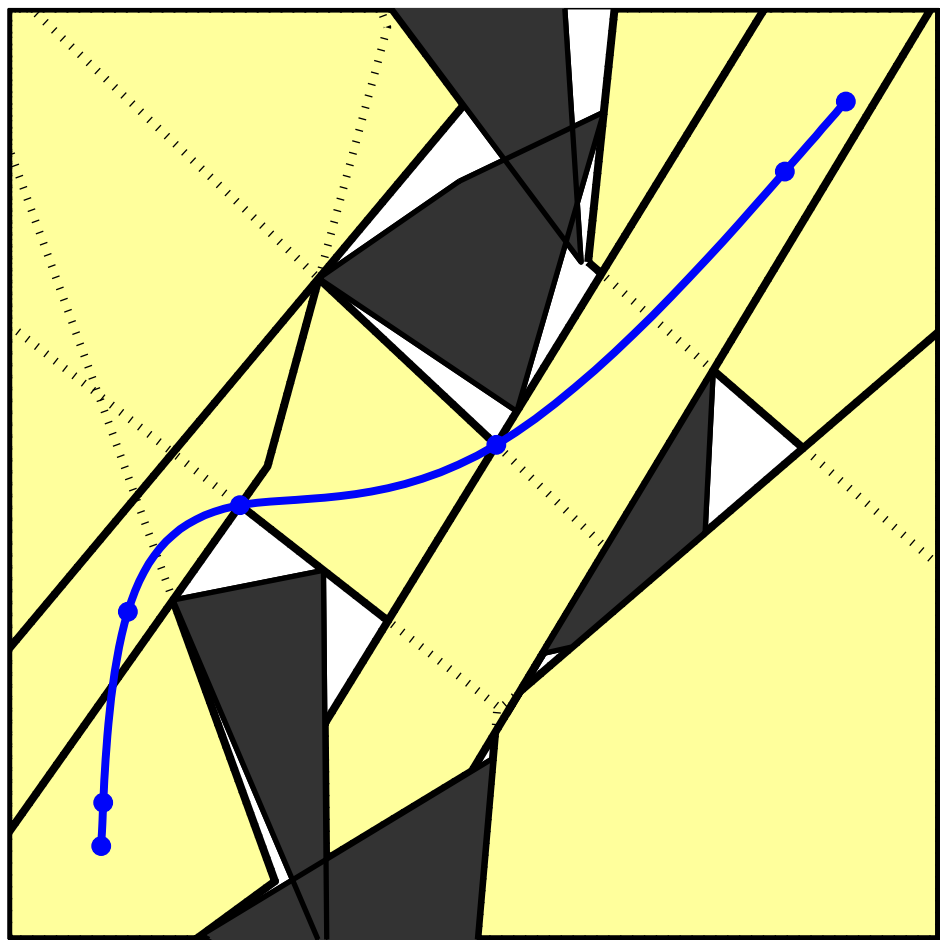
IRIS (Fast approximate convex segmentation)
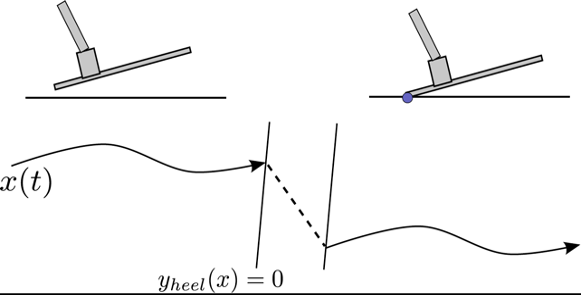
Contact forces are
\( \Rightarrow \) Piecewise-affine or mixed logical-dynamical systems (MLDS)
Shortest path, \(P:\) \[ \min_P \min_{(x_i)_{i \in P}} \sum_{(i,j) \in P} \ell(x_i,x_j).\]
\(\varphi_{ij} = 1\) if the edge \((i,j)\) in shortest path, otherwise \(\varphi_{ij} = 0.\)
\(c_{ij} \) is the (constant) length of edge \((i,j).\)
Use convex hull reformulation + perspective functions to rewrite this as mixed-integer convex.
Finding the shortest path from A to B while avoiding polygonal obstacles (“Euclidean shortest path”):
Our approach:
Going forward...
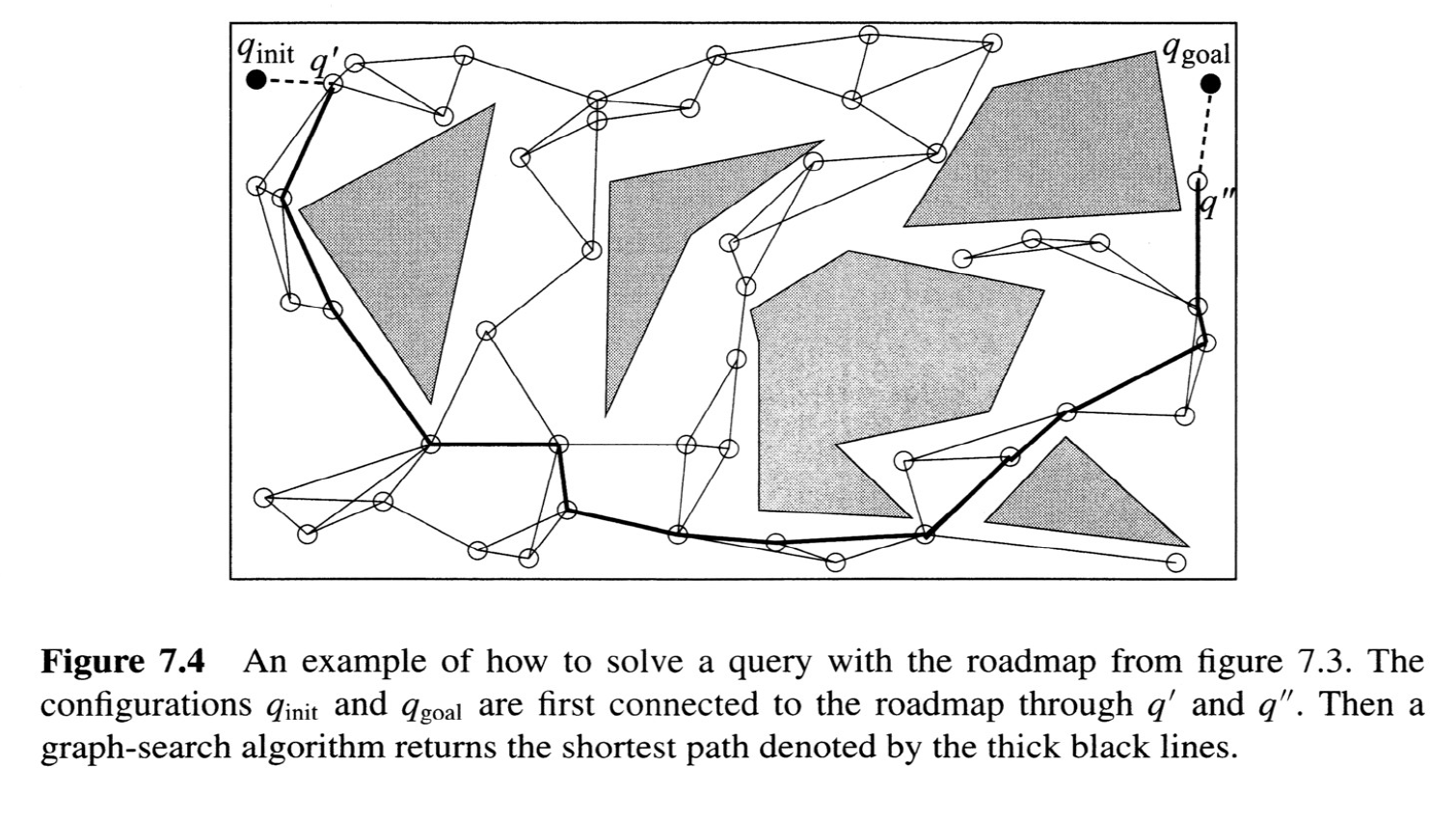
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Still need
By russtedrake
Talk at UIUC, January 19, 2021


