























russtedrake PRO
Roboticist at MIT and TRI
Russ Tedrake
USC CPS Seminar
October 10, 2023
"What's still hard for AI" by Kai-Fu Lee:
Manual dexterity
Social intelligence (empathy/compassion)
"Dexterous Manipulation" Team
(founded in 2016)
For the next challenge:
For the next challenge:
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
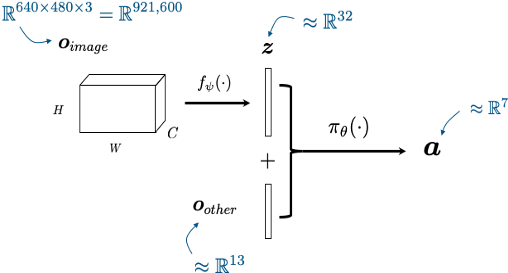
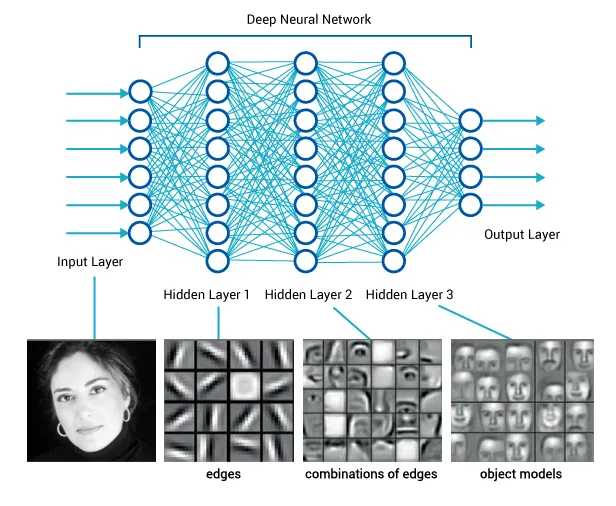
perception network
(often pre-trained)
policy network
other robot sensors
learned state representation
actions
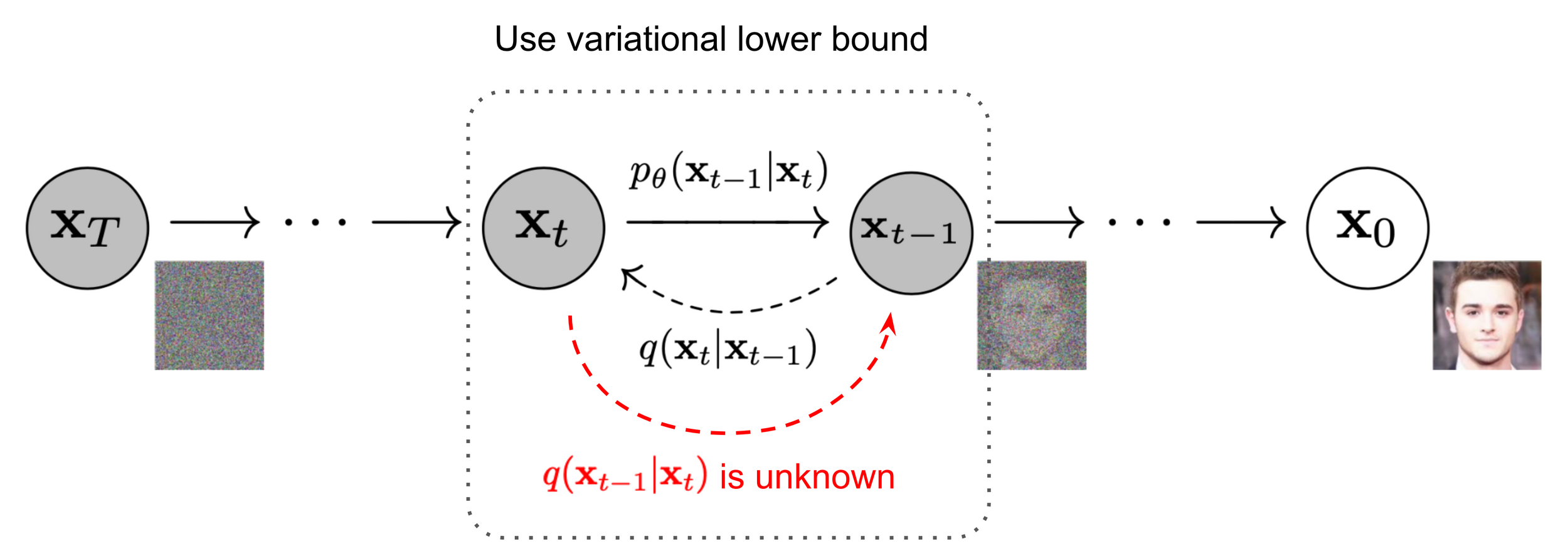
Image source: Ho et al. 2020
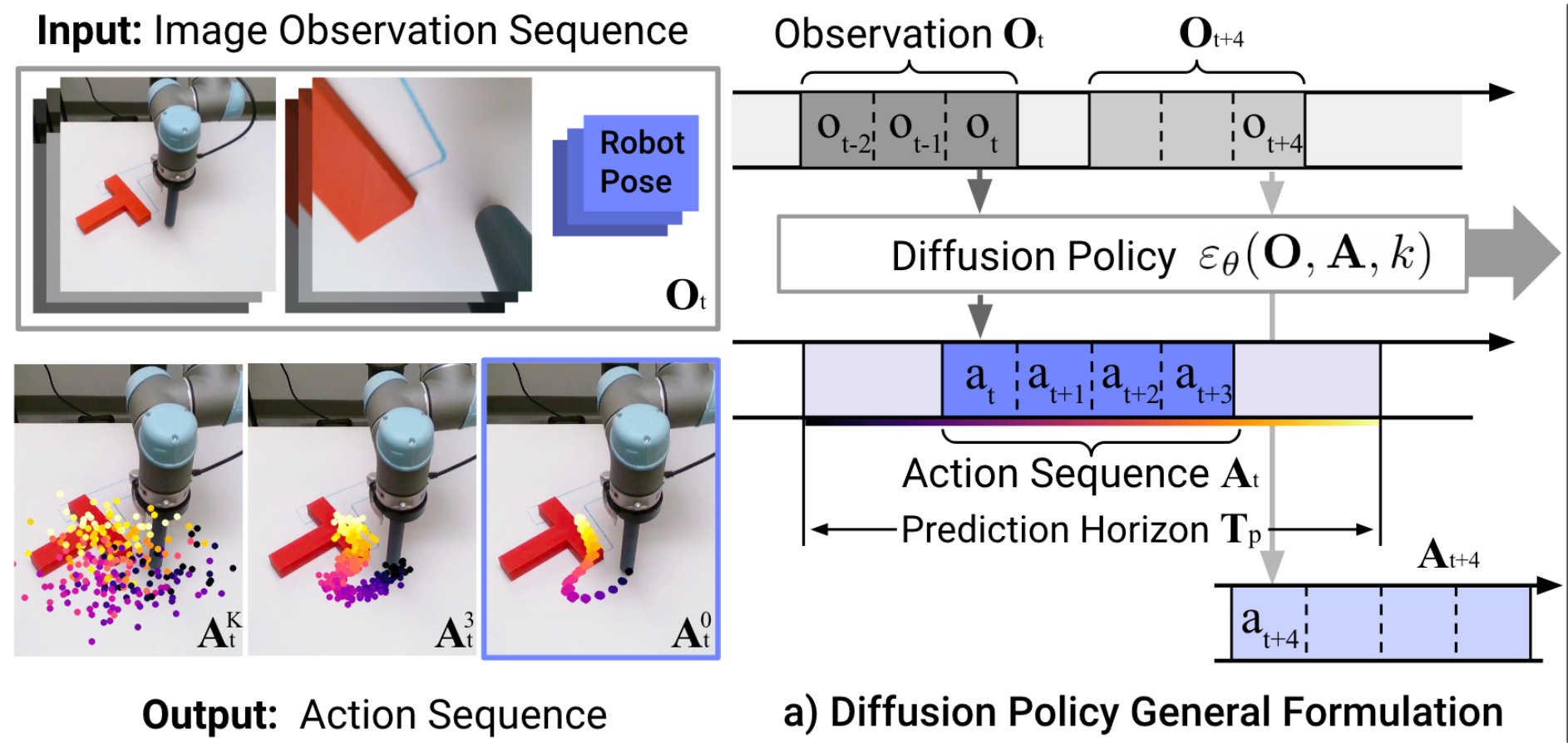
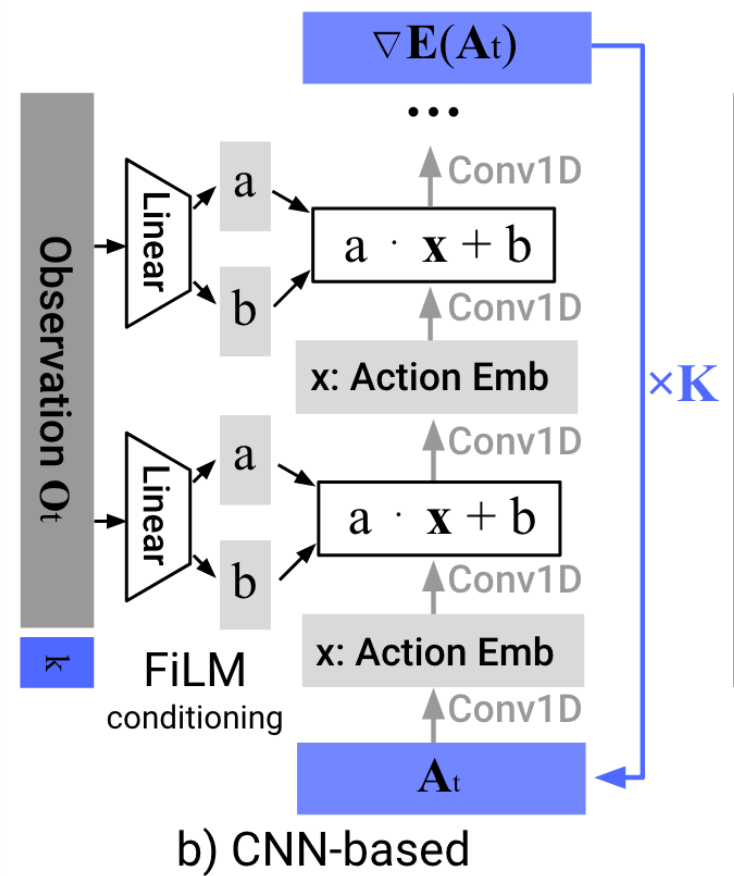
e.g. to deal with "multi-modal demonstrations"
ResNet-18 (pretrained on ImageNet)
110M-150M Parameters
Training Time: 3-6 GPU Days ($150-$300)
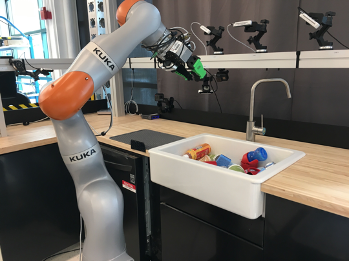
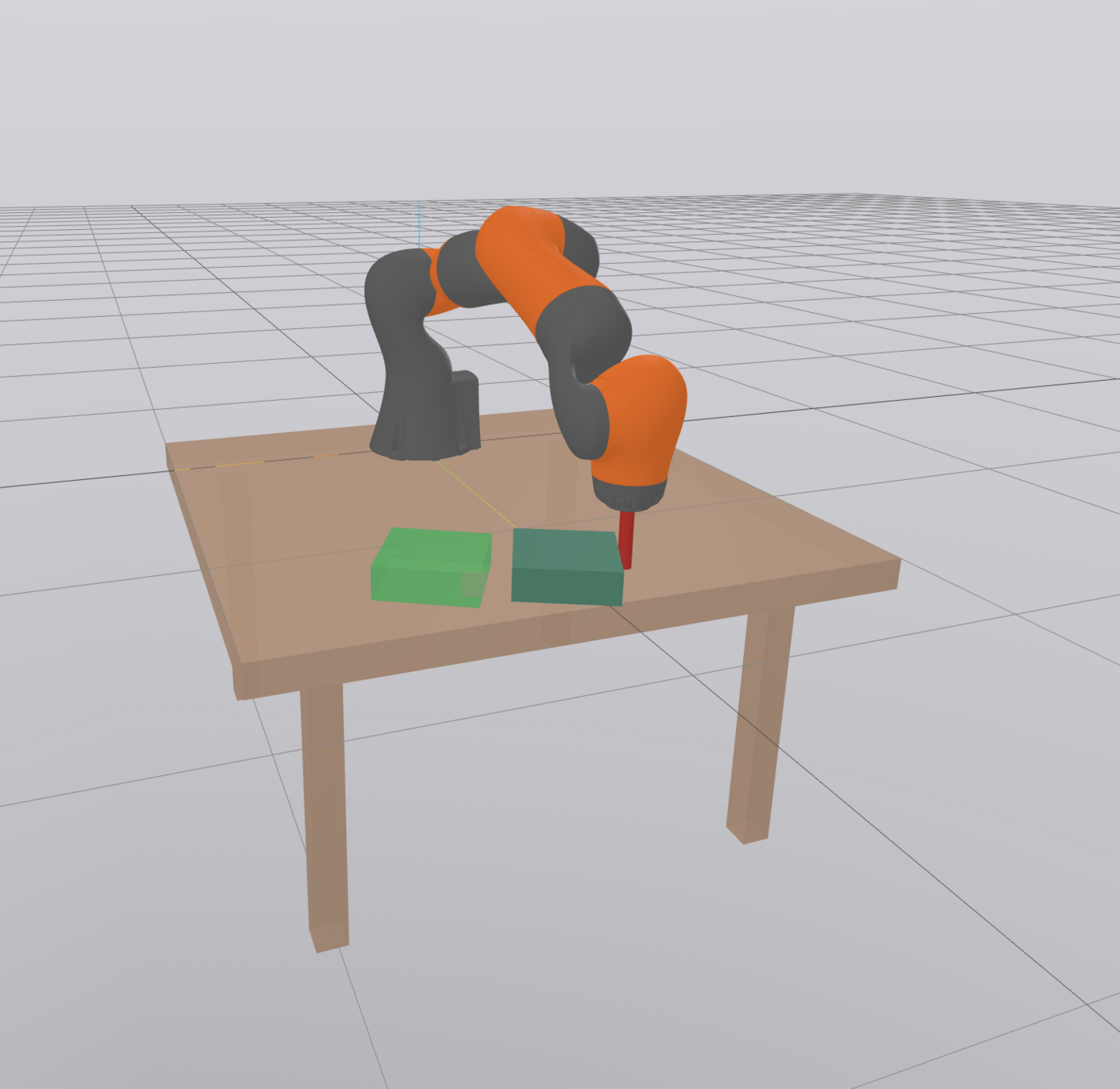
with TRI's Soft Bubble Gripper
Open source:
(manipulation is not solved)
(discrete + continuous planning and control)
Even in simulation (e.g. given a model), I cannot reliably achieve this level of performance w/o a teacher;
but there is no fundamental reason why not
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
Accepted for publication in Science Robotics
Claims:
Default playback at .25x
by Tobia Marcucci in collaboration w/ Stephen Boyd
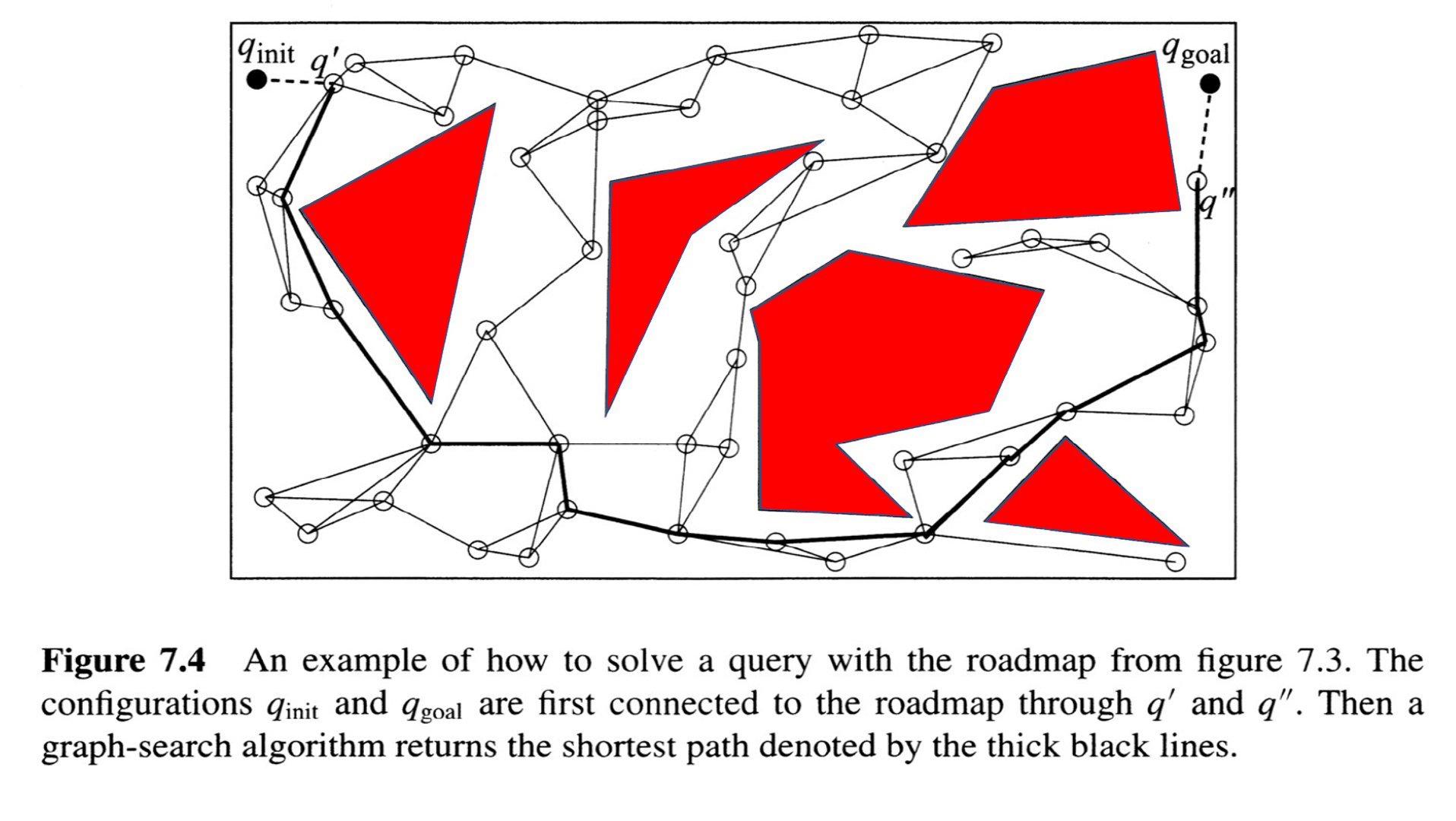
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
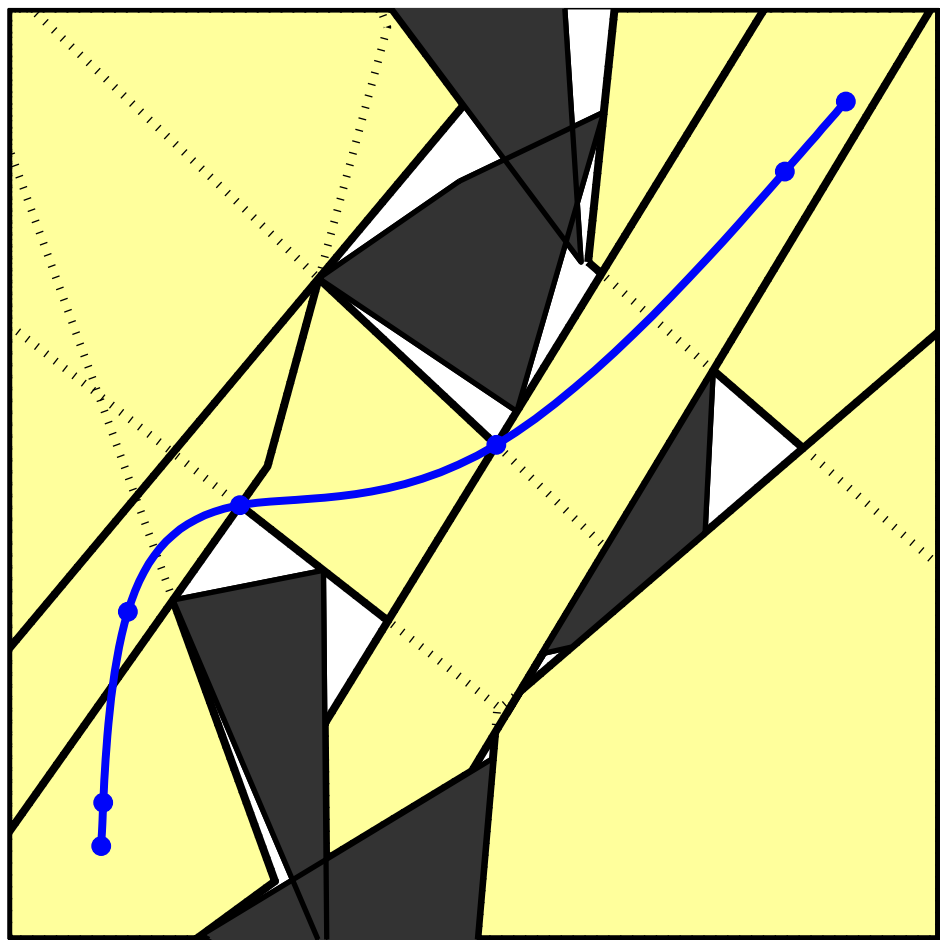
Note: The blue regions are not obstacles.
Mixed-integer formulation with a very tight convex relaxation
Main idea: Multiply constraints + Perspective function machinery
+ time-rescaling
Transitioning from basic research to real use cases
Dave Johnson (CEO): "wow -- GCS (left) is a LOT better! ... This is a pretty special upgrade which is going to become the gold standard for motion planning."
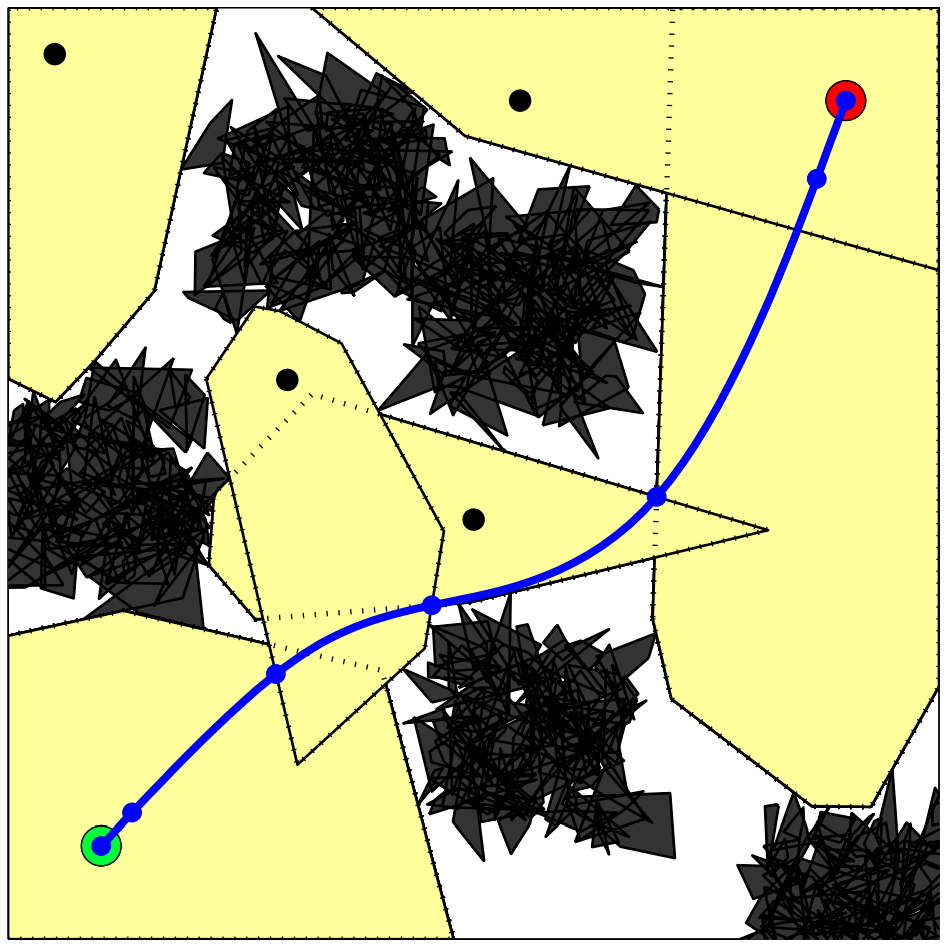
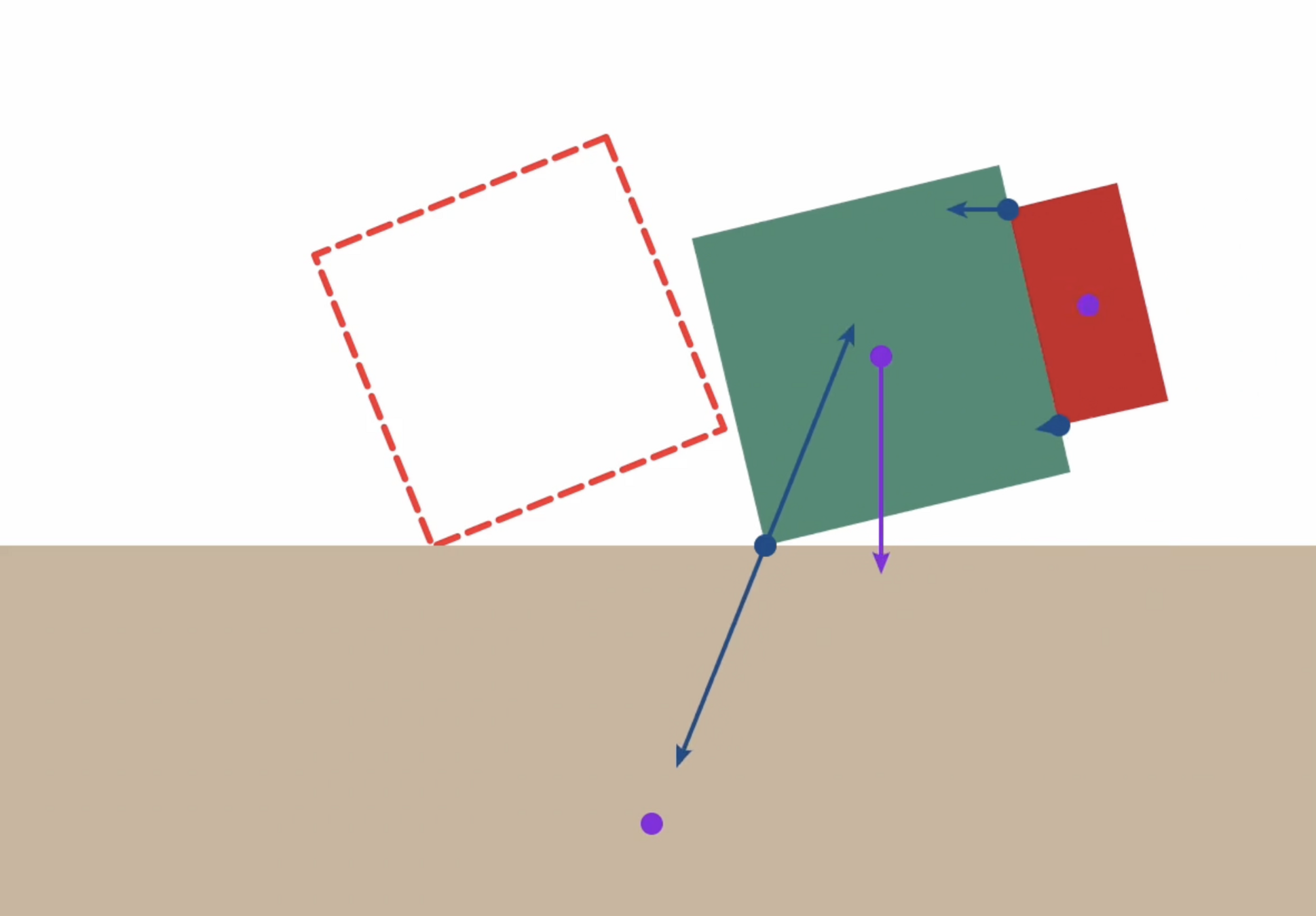
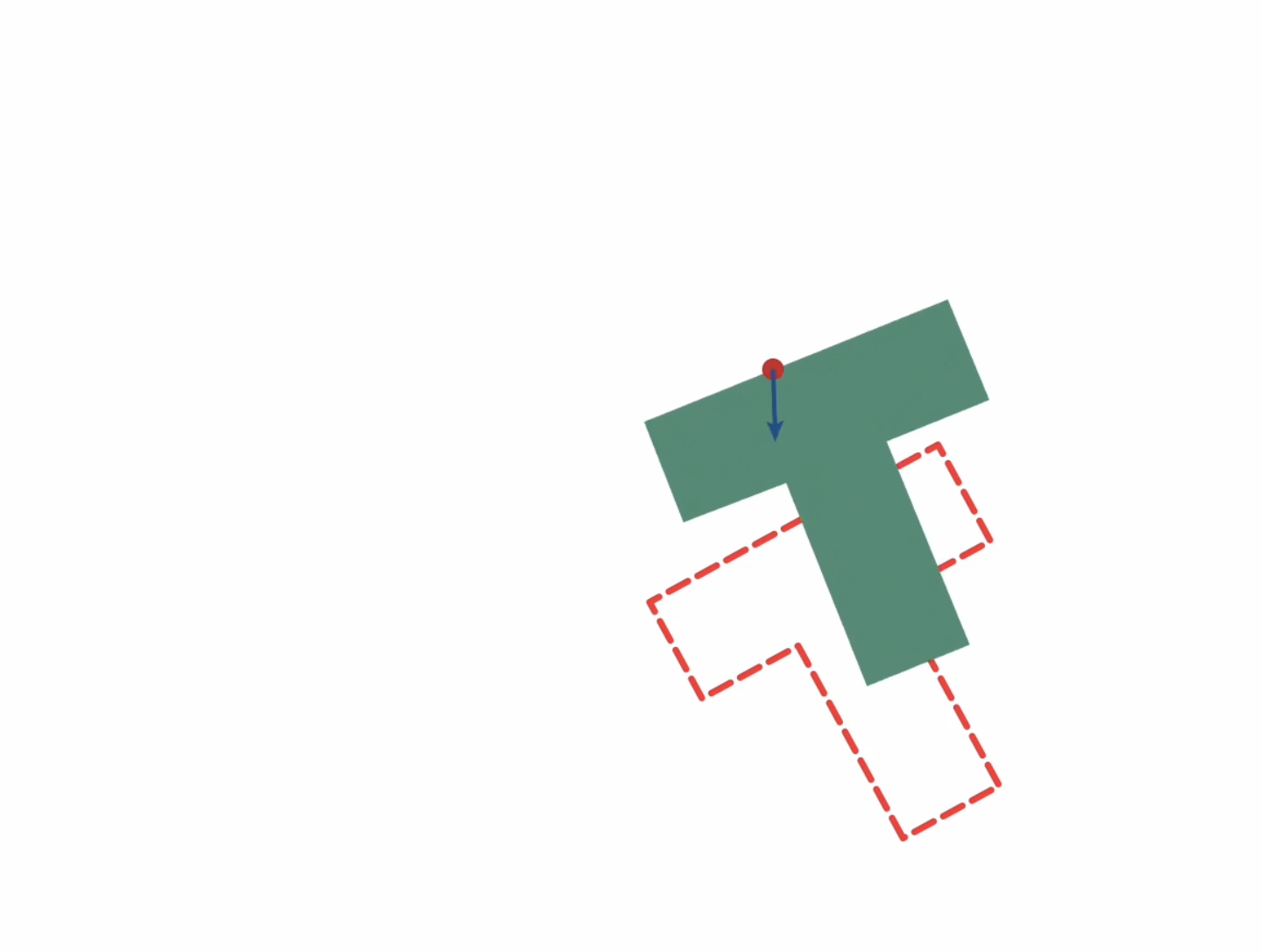
Going beyond collision-free motion planning...
Formulation
or
\(\longrightarrow\)
\(\longrightarrow\)
\(\longrightarrow\)
\(\longrightarrow\)
\(\longrightarrow\)
\(\longrightarrow\)
\(\longrightarrow\)
Start
Goal
GCS version (top down)
Prelimary results by Savva Morozov
This is version 0.1 of a new framework.
There is much more to do, for example:
pip install drake
sudo apt install drakehttp://manipulation.mit.edu
http://underactuated.mit.edu
By russtedrake
USC


